

ЛЕКЦИЯ_5. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
Автоматических систем
5.1 Основные способы математического описания.Уравнения движения.
мает постоянное значение y = y0 и уравнение (1) преобразуется к виду:
![]() (2)
(2)
Конечное уравнение (2) является уравнением статики. Статический режим можно характеризовать с помощью статических характеристик.Статической характеристикой объекта (системы) называется зависимость выходной величины от входной в статическом режиме.Статическую характеристику можно построить экспериментально, если подавать на вход объекта постоянные воздействия и замерять выходную переменную после окончания переходного процесса. Если объект имеет несколько входов, то он характеризуется семейством статических характеристик. В свою очередь, сама статическая характеристика характеризуется коэффициентом k, который определяется как k= dy/dx. Для объектов с нелинейной статической характеристикой коэффициент усиления является переменной величиной, для объектов же с линейными статическими характеристиками коэффициент усиления – величина постоянная (рис. 5.1).

Рис. 5.1 Статическая характеристика объектов:
а – нелинейного; б – линейного
5.2 Примеры уравнений объектов управления
В теории автоматического управления широко используется метод математических аналогий, согласно которому различные по физической природе объекты описываются однотипными математическими зависимостями.
Рассмотрим некоторые примеры составления уравнений статики и динамики для различных по физической природе объектов.
5.2.1 Гидравлический резервуар
Примером простейшего объекта автоматического управления является гидравлический резервуар, в котором имеется приток и сток жидкости. Принципиальная и структурная схемы представлены на рис. 5.2.
Основной
координатой, характеризующей состояние
рассматриваемого объекта, является
уровень
жидкости
Н, который выбирается в качестве выходной
регулируемой величины. Входным и
соответственно регулирующим воздействием
является скорость притока воды в
резервуар Q, внешним возмущением –
расход воды из резервуара G. При постоянной
степени открытия дросселя на притоке
жидкости, уровень
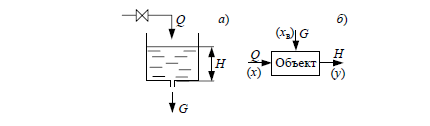
Рис. 5.2 Гидравлическая емкость:
а – принципиальная схема; б – структурная схема
определяется разностью (Q – G). По условиям работы объекта величина притока Q изменяется произвольно во времени. Уравнение динамики, описывающее зависимость уровня H в переходном режиме от Q, в соответствии с законом гидравлики записывается в виде
![]() (3)
(3)
где S – площадь поперечного сечения резервуара.
Уравнение (3) представляет собой математическое описание объекта регулирования – гидравлической емкости и является обыкновенным дифференциальным уравнением 1-го порядка.
5.2.2 Электрическая емкость
Электрической емкостью называется цепь, состоящая из сопротивления R и емкости С (рис. 5.3).

Рис. 5.3 Электрическая емкость:
а – принципиальная схема; б – структурная схема
Выходной
координатой такого объекта может быть
выбран заряд q на обкладках конденсатора,
а
входной
– напряжение на входе цепи U вх .
Дифференциальное
уравнение может быть получено на основе
закона Кирхгофа:
 (4)
(4)
Таким образом, математическим описанием электрической емкости является обыкновенное дифференциальное уравнение 1-го порядка.