

3.3 Розрахунок системи пч-ад
3.3.1 Розрахунок схеми заміщення
Аналіз характеристик АД при частотному управлінні можна зробити, використавши Т-подібну схему заміщення (рисунок 3.1).
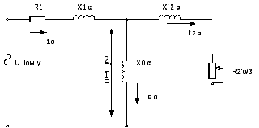
Рисунок 3.9 - Схема заміщення асинхронного двигуна при частотному регулюванні.
Швидкість обертання на ХХ:
 об/хв
об/хв
де р=2 - кількість пар полюсів.
Частота обертання на ХХ:
 с-1
с-1
Номінальна частота обертання:
 с-1
с-1
Номінальне ковзання:
 .
.
Рівняння для критичного ковзання:
 ,
,
де λм - кратність максимального моменту, λм=2,3.
 .
.
Струм намагнічування Iµн:

 А
А
Приведенный струм ротора :
 ;
;
 =65,72
А
=65,72
А
Опір статора:
 ;
;
 =1,23
Ом
=1,23
Ом
Приведенное опір ротора:
 ;
;
 =1,379
Ом
=1,379
Ом
Індуктивний опір контуру намагнічування:

 =143
Ом
=143
Ом
Індуктивное опір ротора:
З
допомогою критичного ковзання знайдемо
 :
:
 ;
;
 =23,62
Ом
=23,62
Ом
Реактивне опір статора:
 ;
;
 =11,35
Ом
=11,35
Ом
Реактивное опір ротора;
 ;
;
 =11,81
Ом
=11,81
Ом
Номінальний момент АД:

Мн= 4065 Нм
Критичний момент:

Мкр=4810·103 Нм
На підставі отриманих результатів проводимо розрахунок статичних і енергетичних характеристик.
3.3.2 Розрахунок статичних характеристик
Закон частотного керування, який визначає співвідношення між частотою і напругою в залежності від характеру технологічного навантаження:
 .
.
 -
відносне напруга;
-
відносне напруга;
 -
відносна
частота;
-
відносна
частота;
 -
відносний момент;
-
відносний момент;
Для
приводів з насосною навантаженням
 :
: ,
тоді закон частотного керування буде
мати вигляд:
,
тоді закон частотного керування буде
мати вигляд:
Прийнятими допущеннями обумовлюється сталість опорів схеми заміщення при даній частоті. Індуктивні опору відповідають частоті ХХ.
Параметр
абсолютного ковзання, або відносна
частота ротора - відношення абсолютного
ковзання до синхронної швидкості при
номі-нальної частоті.

Параметр використовується замість ковзання s і пов'язаний з ним співвідношенням:

Коефіцієнт розсіювання відповідно для статора і ротора:

Загальний коефіцієнт розсіювання

Крім того, введемо позначення:
 ;
; ;
; ;
;
Аналіз і розрахунки усталеного режиму проводяться в діючих значеннях величин.
Для
подальших розрахунків приймемо
позначення:
 ;
;



Для
кожної з розрахованих величин задаються
кілька значень
 і зміна
і зміна

З розрахунку схеми заміщення отримуємо електрорушійну силу.

Потік у повітряному зазорі

Струм статора

Приведенний струм ротора

струм намагнічування

Графіки струмів показані на рисунках 3.10 - 3.12.

Рисунок 3.10 – Графік зміни струмів статора при частотному регулюванні.
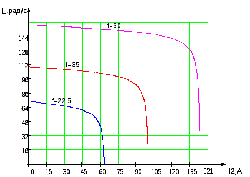
Рисунок 3.11 - Графік зміни струмів ротора при частотному регулюванні.

Рисунок 3.11 – Графік зміни струмів намагнічування.
3.3.3 Розрахунок механічних характеристик і навантажувальні характеристики.
Момент двигуна :

Навантажувальна характеристика визначається з виразів статичного моменту і кутової швидкості:


При цьому S змінюється від 0 до 1.
Механічні характеристики і навантажувальна крива, при частотному регулюванні, зображені на малюнку 3.12.
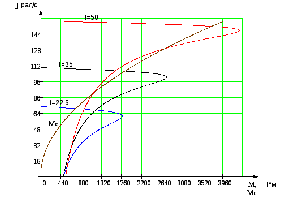
Рисунок 3.12 – Механічні і навантажувальні характеристики
3.3.4 Розрахунок енергетичних характеристик
Коефіцієнт
потужності cos знаходимо за формулою :
знаходимо за формулою :

График
зміни
 показан на рисунке 3.13.
показан на рисунке 3.13.

Рисунок
3.13 – Графік зміни
 .
.
К.П.Д
 визначимо з виразу:
визначимо з виразу:

где :
 -
повні втрати двигуна;
-
повні втрати двигуна;
 -
додаткові втрати;
-
додаткові втрати;
 -
механічні втрати.
-
механічні втрати.
График зміни КПД показан на рисунке 3.14.

Рисунок 3.14 – График зміни К.П.Д