

2.4 Метод предельно допустимого времени работы механизма
Метод эквивалентных ускорений и метод средних перемещений позволяют определять эквивалентную нагрузку двигателя позиционного электропривода по аналитическим формулам без построения нагрузочных диаграмм, что существенно уменьшает время, расходуемое на проектирование.
Однако в ряде случаев правильность выбора мощности электропривода определяется не только допустимой тепловой нагрузкой двигателя, но и возможностью удовлетворить какие-то конкретные технологические требования.
Далее на примере позиционного электропривода нажимного устройства реверсивного прокатного стана показывается предложенная А.Б.Зеленовым и В.С.Коцюбинским методика расчета мощности двигателя по технологическим требованиям и тепловой нагрузке [8].
Для такого механизма
правильно выбранный электродвигатель
должен отрабатывать критическое
перемещение SКР
за время реверса прокатного стана от
скорости выброса металла из валков до
скорости захвата металла валками.
Расчеты, выполненные для 16-ти различных
станов, показали, что для блюмингов
900-1300, слябингов 1100-1250 время подобного
реверса составляет Δt=2,4-3,5
с; для клетей дуо и кварто реверсивных
толстолистовых станов 2250-3600 Δt=1,9-3,0
с. Поэтому электропривод нажимного
устройства реверсивного прокатного
стана должен отработать перемещение
SКР
за некоторое заданное технологическое
время Δt=1,9-3,5
с. Если время движения превысит заданное
технологическое время Δt,
то электропривод нажимного устройства
будет ограничивать производительность
прокатного стана, что недопустимо. Время
![]() на отработку других программных
перемещений
на отработку других программных
перемещений![]() рассчитывать не надо, так как
рассчитывать не надо, так как![]() ,
а время пауз между последующими
включениями привода нажимного устройства
в цикле прокатки возрастает по мере
увеличения длины раската.
,
а время пауз между последующими
включениями привода нажимного устройства
в цикле прокатки возрастает по мере
увеличения длины раската.
Таким образом,
решение задачи расчета мощности привода
нажимного устройства реверсивного
прокатного стана должно учитывать не
только допустимый нагрев электродвигателя,
но и необходимость работы в требуемом
динамическом режиме для отработки
критического перемещения SКР,
за время
![]() ,
причем расчетное технологическое времяΔt
должно задаваться для конкретного
прокатного стана.
,
причем расчетное технологическое времяΔt
должно задаваться для конкретного
прокатного стана.
Нажимные устройства современных реверсивных прокатных станов имеют редукторы, передаточное число которых определяется с точки зрения оптимизации механизма по быстродействию. Дальнейшие рассуждения по расчету мощности электродвигателя нажимных устройств таких станов основываются на предположении, что передаточное число реального редуктора лежит в пределах (0,7-1,7)iОПТ, при которых быстродействие электропривода незначительно (на 15%) отличается от максимального [3].
При известном
передаточном числе редуктора нажимного
устройства (i)
номинальная скорость электродвигателя,
соответствующая заданной скорости
механизма vМ,
будет равна
![]() (
(![]() – спрямляющее число, устанавливающее
связь между скоростью электродвигателя
и линейной скоростью рабочего механизма.
Например, для нажимного устройства с
шагом винтаh
спрямляющее число
– спрямляющее число, устанавливающее
связь между скоростью электродвигателя
и линейной скоростью рабочего механизма.
Например, для нажимного устройства с
шагом винтаh
спрямляющее число
![]() ).
).
Передаточное число
(или близкое к нему) по быстродействию
передачи можно определить по соотношению,
приведенному в [7] (при
![]() ):
):
![]() .
.
Тогда выбираемый для привода электродвигатель должен иметь момент инерции
![]() ,
,
а суммарный момент инерции на валу двигателя
 .
(2.63)
.
(2.63)
По найденному
таким образом значению
![]() и скоростиωН,
соответствующей критическому перемещению
SКР,
определяется необходимый динамический
момент электродвигателя
и скоростиωН,
соответствующей критическому перемещению
SКР,
определяется необходимый динамический
момент электродвигателя
 ,
Дж, (2.64)
,
Дж, (2.64)
где![]() – время разгона двигателя нажимного
устройства (равное времени его торможения)
до установившейся скоростиωН,
необходимой для отработки SКР;
λМ
– перегрузочная способность
электродвигателя по моменту.
– время разгона двигателя нажимного
устройства (равное времени его торможения)
до установившейся скоростиωН,
необходимой для отработки SКР;
λМ
– перегрузочная способность
электродвигателя по моменту.
По величине
максимального времени движения,
задаваемого технологическим процессом
(Δt),
номинальной скорости (ωН)
и найденному в соответствии с (2.63)
суммарному моменту инерции (![]() )
определяется необходимая расчетная
номинальная мощность электродвигателя
по формуле
)
определяется необходимая расчетная
номинальная мощность электродвигателя
по формуле
 ,
кВт. (2.65)
,
кВт. (2.65)
Преобразуем
соотношение (2.65), учтя указанное выше
значение спрямляющего числа
![]() и зависимость
и зависимость![]() .
В этом случае
.
В этом случае
 ,
кВт. (2.66)
,
кВт. (2.66)
Таким образом, по формуле (2.66) на основании данных механического оборудования (JМ, h) и известных технологических требований (vМ, Δt) определяется расчетная номинальная мощность двигателя с известной перегрузочной способностью (λМ), обеспечивающей перемещение нажимного устройства за заданное максимально возможное время Δt. При проектировании системы управления установку регулятора тока (момента) следует выбирать в соответствии с принятым значением λМ. После выбора двигателя по рассчитанной мощности следует также проверить на оптимальность передаточное число редуктора, что подтвердит возможность пользования формулой (2.66).
Например, для клети дуо стана 2800 нажимное устройство имеет параметры: i=11,38; JМ=4354 Дж∙с2; vМ=53 мм/с; h=48 мм; Δt=2,2 с. При λМ=2 номинальная расчетная мощность двигателя составит в соответствии с (2.66):
![]() кВт.
кВт.
На нажимном устройстве действующего толстолистового стана установлены два электродвигателя по 100 кВт с номинальной скоростью пН=750 об/мин, момент инерции каждого двигателя JД=10,25 Дж∙с2. При указанных данных оптимальное передаточное число редуктора
![]() .
.
Фактическое передаточное число составляет 0,78iОПТ, что лежит в указанных выше допустимых пределах.
Расчет мощности по соотношению (2.66) не гарантирует двигатель от перегрева при реальном цикле повторно-кратковременного режима. Найдем условия, при выполнении которых расчетная мощность привода не только обеспечивает заданный технологический режим, но и гарантирует работу двигателя без перегрева.
В соответствии с методом средних перемещений (см. раздел 2.3) относительное значение пускового (тормозного) момента двигателя при полном его использовании по нагреву вычисляется по формуле (2.61).
Определим из (2.61)
номинальную мощность двигателя
![]() и сравним ее с расчетной номинальной
мощностьюРН.Р,
получаемой по соотношению (2.66). Для этого
преобразуем (2.61), учтя, что
и сравним ее с расчетной номинальной
мощностьюРН.Р,
получаемой по соотношению (2.66). Для этого
преобразуем (2.61), учтя, что
![]() ,
,![]() .
Двигатель работает с полной тепловой
нагрузкой при
.
Двигатель работает с полной тепловой
нагрузкой при![]() ;
;![]() (так как
(так как![]() );
);![]() ;
; .
.
После преобразований соотношения (2.61) получим:
![]() .
(2.67)
.
(2.67)
Так как
![]() ,
то с учетом (2.67) получим
,
то с учетом (2.67) получим
![]() ,
кВт. (2.68)
,
кВт. (2.68)
Из сравнения соотношений (2.66) и (2.68) видно, что
![]() .
(2.69)
.
(2.69)
При
![]() номинальная расчетная мощностьРН.Р,
найденная по (2.66), обеспечит не только
требуемую с точки зрения технологии
динамику механизма, но и работу двигателя
без перегрева.
номинальная расчетная мощностьРН.Р,
найденная по (2.66), обеспечит не только
требуемую с точки зрения технологии
динамику механизма, но и работу двигателя
без перегрева.
При реальных
режимах работы электроприводов нажимных
устройств реверсивных прокатных станов
![]() ,
а кратность пускового и тормозного
моментов лежит в пределах
,
а кратность пускового и тормозного
моментов лежит в пределах![]() .
Таким образом, возможно, что коэффициент
.
Таким образом, возможно, что коэффициент![]() .
Поэтому в каждом конкретном случае для
гарантии работы двигателя без перегрева
при обеспечении перемещения механизма
за заданное технологическое время
необходимо, чтобы
.
Поэтому в каждом конкретном случае для
гарантии работы двигателя без перегрева
при обеспечении перемещения механизма
за заданное технологическое время
необходимо, чтобы![]() .
Например, для приведенного выше примера
нажимного устройства толстолистового
станаε=0,28.
В этом случае работа двигателя без
перегрева возможна при
.
Например, для приведенного выше примера
нажимного устройства толстолистового
станаε=0,28.
В этом случае работа двигателя без
перегрева возможна при
![]() .
.
Н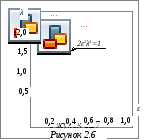 а
рисунке 2.6 показана криваяλ=f(ε),
построенная по соотношению
а
рисунке 2.6 показана криваяλ=f(ε),
построенная по соотношению
![]() .
Эта нелинейная зависимость хорошо
иллюстрирует возможность работы по
заданной технологии при допустимом
перегреве двигателя.
.
Эта нелинейная зависимость хорошо
иллюстрирует возможность работы по
заданной технологии при допустимом
перегреве двигателя.
Г л а в а т р е т ь я
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПЕРЕХОДНЫЕ ПРОЦЕССЫ В РАЗОМКНУТОЙ СИСТЕМЕ Г-Д
3.1 Определение и классификация переходных процессов. общие положения
Переходными процессами в электроприводах называются процессы изменения так называемых фазовых координат, например, скорости двигателя , тока якоря двигателя IЯ, электромагнитного момента М (или момента на валу двигателя), ЭДС Е и других величин при переходе