

зеленов / УЧЕБ_ПОСОБИЕ_часть_2 / редакт / 15_9
.doc15.9 Электропривод с частотно-управляемым
синхронным двигателем*
Современное состояние частотно-регулируемых электроприводов как в части выполнения их силовой основы – силовых преобразователей частоты, так и средств управления и регулирования позволяет заменять нерегулируемые приводы большой гаммы механизмов (например, центробежных и поршневых насосов и компрессоров, вентиляторов, аглоэксгаустеров, газо- и воздуходувок, различного вида мельниц, дробилок, ножниц и пил, черновых клетей прокатных станов и т.д.) регулируемыми, а также делает технически разрешимой замену регулируемого привода постоянного тока. Кроме того, открылась возможность резкого увеличения единичной мощности и перегрузочной способности, недостижимого при применении двигателей постоянного тока из-за ограничений по условиям коммутации. Это даст возможность разрабатывать агрегаты повышенной производительности.
Практически все ведущие электротехнические фирмы увеличивают ежегодный выпуск электроприводов переменного тока. Прогнозируется рост производства этих электроприводов на 20-30%. Рост их производства и обоснованность прогноза обусловлены в основном двумя устойчивыми тенденциями:
– автоматизацией производственных процессов с использованием АСУТП, что предполагает применение регулируемых электроприводов;
– применением энергосберегающих технологий в различных отраслях производства, которые дают существенный экономический эффект.
|
|
|
*)Раздел подготовил к.т.н. Е.В. Полилов
Существенный процент роста производства регулируемых электроприводов дают частотно-регулируемые электроприводы переменного тока. Это вызвано тем, что многие ведущие фирмы освоили в производстве новые комплектующие изделия: силовые полупроводниковые приборы, в том числе силовые транзисторы IGBT, запираемые тиристоры GTO и IGCT; микропроцессорные средства построения систем управления, защит и регулирования электроприводов; специальные двигатели переменного тока.
Перечисленные группы новых комплектующих изделий позволили получить скачок величин основных показателей (энергетических, массогабаритных и эксплуатационных) электроприводов переменного тока.
Электропривод с частотно-управляемым синхронным двигателем является наиболее универсальным и перспективным регулируемым электроприводом переменного тока в широком диапазоне мощностей (от десятков ватт до нескольких десятков тысяч киловатт) и скоростей вращения (от единиц до 12 тыс. мин-1 и выше). Они выполняются как с синхронными двигателями (СД) традиционной конструкции (турбо- и гидромашины), так и специальной (с постоянными магнитами, галополярные и т. д.).
СД различной мощности находят всё более широкое применение во многих отраслях народного хозяйства благодаря ряду технико-экономических преимуществ над асинхронными двигателями. Они обладают более высоким КПД, значительной перегрузочной способностью, повышенной устойчивостью работы при снижении напряжения в питающей сети и возможностью регулирования отдаваемой реактивной энергии в зависимости от степени возбуждения и момента нагрузки на валу.
Особенно целесообразно применение СД
в тех случаях, когда питающие сети имеют
низкий
![]() вследствие большого числа потребителей
реактивной энергии. Используя естественные
свойства отдавать избыток реактивной
энергии при потреблении активной, можно
регулирование возбуждения СД компенсировать
недостаток реактивной энергии в сети.
Номинальный
вследствие большого числа потребителей
реактивной энергии. Используя естественные
свойства отдавать избыток реактивной
энергии при потреблении активной, можно
регулирование возбуждения СД компенсировать
недостаток реактивной энергии в сети.
Номинальный
![]() СД носит, как правило, опережающий
характер.
СД носит, как правило, опережающий
характер.
Независимо от типа преобразователя (транзисторный со звеном постоянного напряжения в сервоприводах, тиристорный со звеном постоянного тока в электроприводах по схеме «вентильного двигателя», НПЧ в безредукторных электроприводах по схеме «НПЧ – низкочастотный СД») источник питания переменной частоты работает в режиме источника тока, который организуется параметрически либо посредством управления.
Другой особенностью этих электроприводов является организация управления вентильным преобразователем по положению вала СД (наличие датчика положения вала СД), реже по положению вектора магнитного потока. Выбор способа управления определяется требованиями электропривода по диапазону регулирования скорости и к динамическим характеристикам. Глубокорегулируемые и реверсивные электроприводы разрабатываются с применением датчика положения (ДП) на валу приводного двигателя; он же используется и как датчик скорости,
С ростом единичной мощности промышленных агрегатов, а также требований к перегрузочной способности и быстродействию в мировой практике появилась тенденция к применению безредукторного привода переменного тока, выполняемого по системе «НПЧ – низкочастотный СД».
Первыми установками с безредукторным приводом переменного тока были размольные мельницы повышенной производительности цементной и горнорудной промышленности, где применение электропривода по системе «НПЧ – низкочастотный СД» было обусловлено ограничениями по предельному моменту, передаваемому редуктором.
В периодической печати опубликованы результаты промышленного внедрения и исследований безредукторного привода металлургических прокатных механизмов: блюминга 4000 кВт, 60/120 мин-1; черновой клети широкополосного стана 2000 кВт, 140/280 мин-1 и ряда других прокатных станов. Более того, в свете реконструкции толстолистового стана 2800 Алчевского металлургического комбината в 2005-2006 г. руководством комбината принято решение о приобретении и установке для клети «Кварто» вместо существующего приводного электродвигателя постоянного тока двух синхронных электродвигателей суммарной удвоенной мощностью. С фирмой Alstom (Германия) заключен контракт на поставку соответствующего электрооборудования, в том числе и преобразователей частоты для питания двигателей.
Для металлургических приводов решающими являются такие преимущества частотно-управляемого СД (по сравнению с двигателями постоянного тока), как отсутствие ограничений по мощности и, следовательно, отсутствие необходимости в двух- и трехъякорных конструкциях, значительно более высокая перегрузочная способность (до 5–6 - кратной величины) и скорость нарастания момента (до 500–1000 Мном/с), а также возможность существенного улучшения динамических показателей в модификациях СД специального исполнения.
Другими областями применения безредукторного привода с частотно-управляемым СД являются шахтные подъемные машины, гребные винты крупных ледоколов и т. п. В зависимости от требований к быстродействию электропривод по системе «НПЧ – низкочастотный СД» может быть реализован с СД двух типов: некомпенсированным или компенсированным (с дополнительной обмоткой возбуждения поперечной оси). Как показывают исследования, при быстродействии, характеризуемом временем нарастания момента менее 30–40 мс, предпочтительно применение компенсированного СД: это позволяет снизить установленную мощность НПЧ. Однако следует указать, что в этом случае мощность реверсивного тиристорного возбудителя обмотки возбуждения поперечной оси может составить до 1/3 мощности НПЧ.
Разработка безредукторного электропривода с частотно-управляемым СД требует комплексного подхода к выбору основных параметров уникального силового оборудования: высокомоментного СД; НПЧ, возбудителя. Массогабаритные показатели этого оборудования определяются, в основном, заданным режимом работы СД и требованиями к быстродействию.
Управление переходными процессами в
машинах переменного тока основывается
на необходимости организовывать
управление по переменным состояния:
вектору тока статора
![]() ,
вектору тока ротора
,
вектору тока ротора
![]() ,
потокосцеплению статора
,
потокосцеплению статора
![]() ,
потокосцеплению ротора
,
потокосцеплению ротора
![]() ,
главному потокосцеплению машины
,
главному потокосцеплению машины
![]() .
Эти переменные состояния взаимосвязаны
перекрёстными связями.
.
Эти переменные состояния взаимосвязаны
перекрёстными связями.
Появление в настоящее время широкой
номенклатуры вычислительной техники
позволяет программно реализовать блоки,
дающие возможность разделить скрытые
управляющие сигналы. Базовым элементом
такой системы управления электроприводом
переменного тока является преобразователь
координат (векторный преобразователь).
При помощи преобразователя координат
осуществляется преобразование сигналов,
пропорциональных переменным состояния
(![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() )
из системы координат, жёстко связанной
со статором (
)
из системы координат, жёстко связанной
со статором (![]() )
или с ротором (
)
или с ротором (![]() ),
во вращающуюся систему координат 1-2 в
соответствии с формулами:
),
во вращающуюся систему координат 1-2 в
соответствии с формулами:
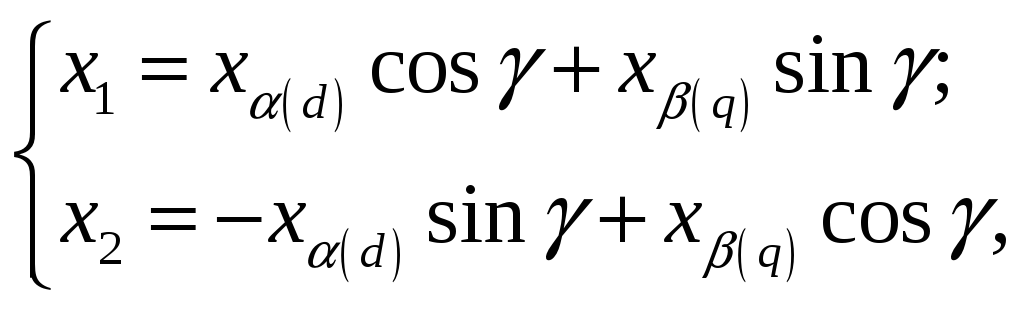 (15.24)
(15.24)
где
![]() - угол, отсчитываемый от оси
- угол, отсчитываемый от оси
![]() до вектора
до вектора
![]() .
.
Составляющие
![]() и
и
![]() могут быть получены при помощи датчиков
Холла, расположенных по осям
могут быть получены при помощи датчиков
Холла, расположенных по осям
![]() ,
с последующим нормированием по амплитуде
или при помощи вычислителя, использующего
измерительные обмотки.
,
с последующим нормированием по амплитуде
или при помощи вычислителя, использующего
измерительные обмотки.
Составляющие
![]() и
и
![]() в системе координат 1-2 получаются в виде
сигналов постоянного тока, значения
которых определяются выражениями:
в системе координат 1-2 получаются в виде
сигналов постоянного тока, значения
которых определяются выражениями:
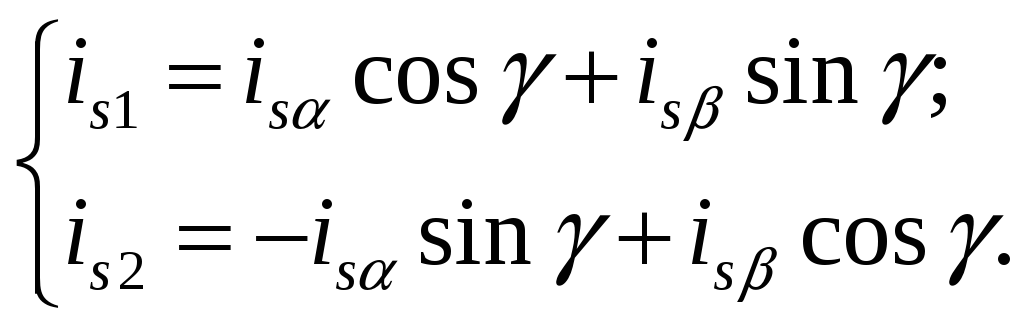 (15.25)
(15.25)
По этим составляющим токов может быть организована система подчинённого управления потоком и моментом двигателя.
Момент, развиваемый машиной переменного тока, определяется векторным произведением переменных состояния:
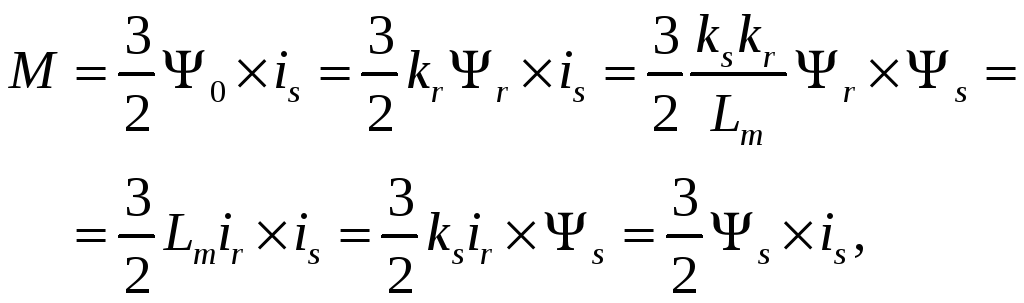 (15.26)
(15.26)
Причём оба вектора должны быть взяты в одной и той же системе координат.
Общее выражение векторного произведения
двух векторов
![]() в произвольной системе координат имеет
вид:
в произвольной системе координат имеет
вид:
![]() .
(15.27)
.
(15.27)
Нетрудно видеть, что если взять систему координат, жёстко связанную с первым вектором, входящим в векторное произведение (15.26), то формула (15.27) преобразуется к виду:
![]() .
(15.28)
.
(15.28)
Выражение для момента машины упростится, и будет определяться амплитудой первого вектора и составляющей второго, находящегося в квадратуре к первому вектору.
Выбор переменных состояния и, следовательно, системы координат определяется конкретным типом машины переменного тока и назначением привода.
При управлении приводом переменного
тока в большинстве случаев целесообразно
стабилизировать модуль потокосцепления
и управлять моментом, развиваемым
двигателем, при помощи управления
составляющей вектора тока
![]() или
или
![]() .
Раздельное управление модулем
потокосцепления и составляющей вектора
тока всегда осуществимо.
.
Раздельное управление модулем
потокосцепления и составляющей вектора
тока всегда осуществимо.
Для получения автономности управления потокосцеплением и моментом необходимо учитывать наличие нелинейных перекрёстных влияний переменных состояния. В простейшем случае развязка переменных состояния может быть осуществлена путём компенсации.
При использовании систем координат,
связанных с
![]() и
и
![]() ,
канал управления модулем потокосцепления
при управлении со стороны статора
необходимо строить по одноконтурной
схеме и по двухконтурной схеме управления
подчинённого регулирования в случае
использования системы координат,
связанной с
,
канал управления модулем потокосцепления
при управлении со стороны статора
необходимо строить по одноконтурной
схеме и по двухконтурной схеме управления
подчинённого регулирования в случае
использования системы координат,
связанной с
![]() (пример такой системы – система
«Трансвектор»). В случае управления со
стороны ротора (системы управления
машинами двойного питания) при
использовании системы координат
(пример такой системы – система
«Трансвектор»). В случае управления со
стороны ротора (системы управления
машинами двойного питания) при
использовании системы координат
![]() или
или
![]() управление модулем
управление модулем
![]() или
или
![]() можно осуществить по одно контурной
схеме, а при использовании системы
координат
можно осуществить по одно контурной
схеме, а при использовании системы
координат
![]() - по двухконтурной схеме. Канал управления
моментом при стабилизации модуля
потокосцепления строится одно контурным
как канал управления составляющей тока
- по двухконтурной схеме. Канал управления
моментом при стабилизации модуля
потокосцепления строится одно контурным
как канал управления составляющей тока
![]() .
.
При использовании любых других систем
координат системы управления оказываются
либо более сложными, либо неспособными
осуществлять управление переходными
процессами. Действительно, техническая
реализация систем векторного управления
требует получения сигналов обратных
связей, пропорциональных состовляющих
векторов
![]() ,
,
![]()
![]() и
и
![]() ,
,
![]()
![]() .
.
В системе, построенной по принципу
стабилизации
![]() ,
возможно прямое измерение
,
возможно прямое измерение
![]() ,
,
![]() при помощи измерения индукции в зазоре
машины по осям
при помощи измерения индукции в зазоре
машины по осям
![]() и
и
![]() .
В системах со стабилизацией
.
В системах со стабилизацией
![]() или
или
![]() составляющие
составляющие
![]() ,
,
![]() или
или
![]() ,
,
![]() могут быть получены только при помощи
дополнительных вычислителей, так как
прямое измерение составляющих
потокосцеплений невозможно.
могут быть получены только при помощи
дополнительных вычислителей, так как
прямое измерение составляющих
потокосцеплений невозможно.
Электропривод с регулированием в осях ротора применяют при высоких требованиях к качеству регулирования скорости и (или) перегрузочной способности.
Функциональная схема электропривода
показана на рисунке 15.40.
В таком электроприводе регулирование
переменных осуществляется в синхронно
вращающейся системе координат,
образованной осями d,
q ротора. Система
регулирования имеет подчиненную
структуру и содержит три внутренних
контура регулирования в соответствии
с тремя апериодическими звеньями в
структурной схеме СД – контуры
регулирования поперечного is,q
и продольного is,d
токов статора и контур регулирования
потокосцепления возбуждения
![]() с
регуляторами AAq,
AAq, AV
соответственно. Эти контуры
подчинены внешнему контуру регулирования
частоты вращения с регулятором AR.
с
регуляторами AAq,
AAq, AV
соответственно. Эти контуры
подчинены внешнему контуру регулирования
частоты вращения с регулятором AR.
Выходные сигналы регуляторов AAd,
AAq представляют
собой проекции обобщенного вектора
управляющего напряжения
![]() на оси координат d,
q; в установившемся
режиме привода это – постоянные
напряжения. Между тем для управления
НПЧ необходимы проекции вектора
на оси координат d,
q; в установившемся
режиме привода это – постоянные
напряжения. Между тем для управления
НПЧ необходимы проекции вектора
![]() на оси статора. Переход к этим
проекциям осуществляется преобразователем
поворота UQ1 и
преобразователем фаз UPH1.
Преобразователь поворота осуществляет
переход к напряжениям
на оси статора. Переход к этим
проекциям осуществляется преобразователем
поворота UQ1 и
преобразователем фаз UPH1.
Преобразователь поворота осуществляет
переход к напряжениям
![]() ,
,
![]() в системе координат
в системе координат
![]() ,
,
![]() ,
связанной со статором. Преобразователь
фаз UPH1 осуществляет
переход от проекций вектора
,
связанной со статором. Преобразователь
фаз UPH1 осуществляет
переход от проекций вектора
![]() ,
,
![]() двухфазной системы к проекциям,
двухфазной системы к проекциям,
![]() ,
,
![]() ,
,
![]() трехфазной системы.
трехфазной системы.
Сигналы обратных связей по токам
![]() ,
,
![]() поступают на входы регуляторов AAd,
AAq с выходов
датчиков токов UA1
– UA3 фаз статора
через преобразователь фаз UPH2
и преобразователь поворота UQ2.
Преобразователь UPH2
осуществляет переход от трехфазной
к двухфазной системе координат, а
преобразователь UQ2
– от системы координат
поступают на входы регуляторов AAd,
AAq с выходов
датчиков токов UA1
– UA3 фаз статора
через преобразователь фаз UPH2
и преобразователь поворота UQ2.
Преобразователь UPH2
осуществляет переход от трехфазной
к двухфазной системе координат, а
преобразователь UQ2
– от системы координат
![]() ,
,
![]() к системе координат d,
q.
к системе координат d,
q.
|
|
Рисунок 15.40 – Функциональная схема синхронного электропривода с регулированием в осях ротора |
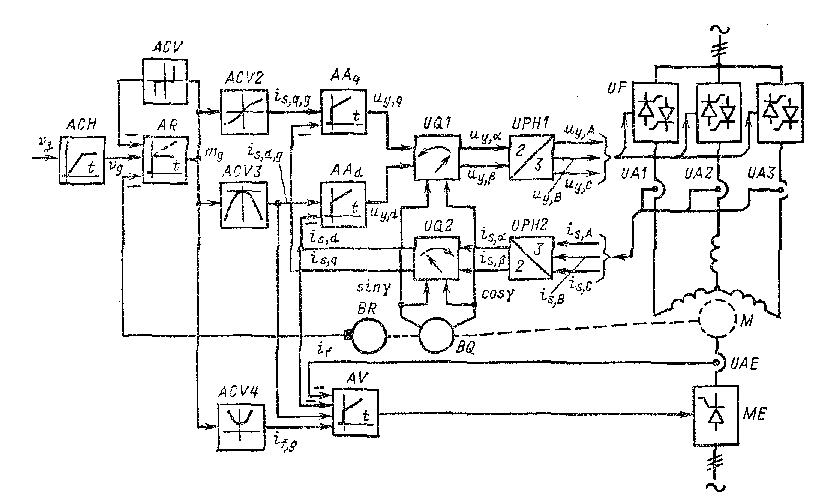
Для управления преобразователями
поворота используется датчик углового
положения ротора BQ,
формирующий сигналы
![]() ,
,
![]() .
.
Регулятор потокосцепления возбуждения
АV управляет
нереверсивным тиристорным возбудителем
ME. В качестве
сигналов обратной связи на вход этого
регулятора поданы сигналы
![]() с выхода преобразователя UQ2
и сигнал
с выхода преобразователя UQ2
и сигнал
![]() с выхода датчика тока возбуждения
UAE.
с выхода датчика тока возбуждения
UAE.
Задание на входы регуляторов AAq, AAd, AV внутренних контуров регулирования поступает с выхода регулятора AR через нелинейные элементы ACV2-ACV4.
Для поддержания потока в воздушном
зазоре СД
![]() на неизменном заданном уровне
на неизменном заданном уровне
![]() и для поддержания перпендикулярности
обобщенных векторов тока статора
и для поддержания перпендикулярности
обобщенных векторов тока статора
![]() и потока в зазоре
и потока в зазоре
![]() характеристики нелинейных элементов
ACV2-ACV4
должны быть соответственно выбраны
по следующим соотношениям:
характеристики нелинейных элементов
ACV2-ACV4
должны быть соответственно выбраны
по следующим соотношениям:
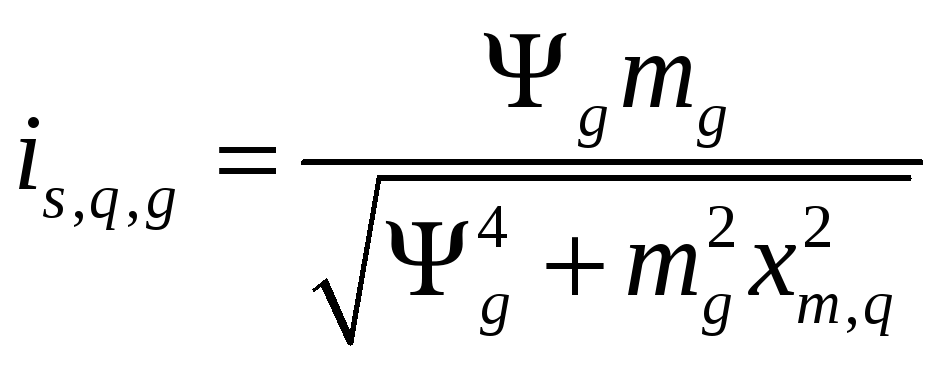 ;
;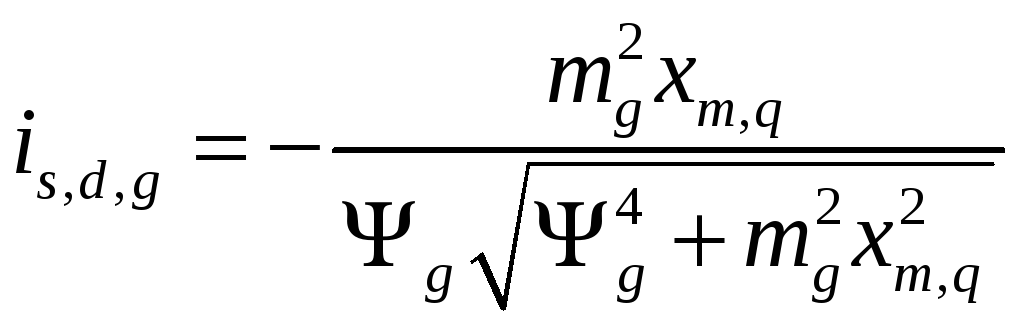 ;
;  ,
,
где
![]() ,
,
![]() ,
,
![]() – сигнал на выходах элементов ACV2,
ACV3, АСV4
соответственно;
– сигнал на выходах элементов ACV2,
ACV3, АСV4
соответственно;
![]() – заданное значение момента двигателя
– сигнал на выходе регулятора частоты
вращения AR.
– заданное значение момента двигателя
– сигнал на выходе регулятора частоты
вращения AR.
В результате задание потокосцепления
определяется соотношением
![]() .
Масштабный коэффициент на входе
регулятора АV
по
.
Масштабный коэффициент на входе
регулятора АV
по
![]() такой же, как на входе обратной
связи по
такой же, как на входе обратной
связи по
![]() ,
на входе по
,
на входе по
![]() – как на входе обратной связи по
– как на входе обратной связи по
![]() .
.
Обратная связь по частоте вращения на вход AR подается с выхода тахогенератора BR, Заданное значение частоты вращения формируется задатчиком интенсивности АСН. Нелинейный элемент АСV1 ограничивает задание момента двигателя на допустимом уровне, который в данном электроприводе может достигать 5–7-кратного значения.