

зеленов / УЧЕБ_ПОСОБИЕ_часть_2 / редакт / 15 продолж 2 15
.doc
В ентиль
VD в цепи обмотки
подмагничивания ДН необходим для того,
чтобы не менять направление тока iП.
Для ДН безразлично направление тока
подмагничивания. Величина сопротивления
ХL его рабочих
обмоток определяется лишь абсолютной
величиной тока подмагничивания, как
это видно из характеристики рисунка
5.24.
ентиль
VD в цепи обмотки
подмагничивания ДН необходим для того,
чтобы не менять направление тока iП.
Для ДН безразлично направление тока
подмагничивания. Величина сопротивления
ХL его рабочих
обмоток определяется лишь абсолютной
величиной тока подмагничивания, как
это видно из характеристики рисунка
5.24.
Однако изменение полярности iП и рост этого тока могут возникнуть при сбросе нагрузки, когда UТ > UЗ. В этом случае начинается ненужное подмагничивание ДН и увеличение напряжение на статоре АД вместо снижения его, что вызовет неустойчивую работу привода.
При пуске АД в первый момент UТ=0, величина iП максимальна, ДН подмагничен до насыщения, сопротивление его минимально, а напряжение на статоре наибольшее. Этому положению соответствует точка в на характеристиках рисунки 5.24 и 5.27. С ростом скорости растет UТ и уменьшается iП. Однако из-за значительного насыщения ДН это уменьшение iП не имеет практического значения (см. рис. 5.24 ), так как сопротивление дросселя минимально. Разгон АД осуществляется по механической характеристикой вб, соответствующий наибольшему напряжению на статоре. В точке б начинается резкое размагничивание ДН, растет его сопро-тивление, и уменьшается напряжение на статоре АД.
Дальнейший пуск двигателя соответствует смешению рабочей точки по характе-ристике ба, если пуск АД осуществляется вхолостую или по характеристике ба1 при какой-то величине МС. Переход в тормозной режим противовключения осуществляется простым уменьшением U3 без переключений в схеме.
Рассмотренная
схема регулирования скорости АД
разработана в институте автоматики НАН
Украины. Обеспечивается диапазон
регулирования скорости 8
![]() 10/1.
10/1.
![]()
Возможно построение замкнутой системы регулирования скорости АД с включением ДН в цепь ротора машины (рис. 5.28).
Принцип работы этой системы заключается в плавном изменении добавочного сопротивления в цепи ротора АД, что меняет жесткость механи-ческой характеристи-ки.
При увеличении нагрузки и соответст-вующего снижения скорости АД умень-шиться UT и возрастает напряжение управления Uу =UЗ-UT.
Р астет
ток под-магничивания
iП,
снижается сопротивление ДН, включенного
в ротор, что обеспечивает переход рабочей
точки на механическую характеристику
АД, соответствующую меньшему значению
сопротивления ротора (то есть на более
жесткую характеристику) – см. рисунок
5.29.
астет
ток под-магничивания
iП,
снижается сопротивление ДН, включенного
в ротор, что обеспечивает переход рабочей
точки на механическую характеристику
АД, соответствующую меньшему значению
сопротивления ротора (то есть на более
жесткую характеристику) – см. рисунок
5.29.
Е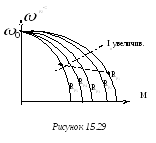 сли
использовать ДН с несколькими обмотками
управления, то такой ДН лучше называть
силовым магнитным усилителем (СМУ). С
помощью обмоток управления СМУ
обеспечивается так называемая сила
(F1
в обмотке ОУ1), а также намагничивающие
силы в обмотке ОУ2 отрицательной обратной
связи по напряжению (F2)
и в обмотке ОУ3 положительной обратной
связи по току (F3
) .
сли
использовать ДН с несколькими обмотками
управления, то такой ДН лучше называть
силовым магнитным усилителем (СМУ). С
помощью обмоток управления СМУ
обеспечивается так называемая сила
(F1
в обмотке ОУ1), а также намагничивающие
силы в обмотке ОУ2 отрицательной обратной
связи по напряжению (F2)
и в обмотке ОУ3 положительной обратной
связи по току (F3
) .
При
соответствующем подборе параметров
обратных связей соотношение
![]() обеспечивает автоматическое регулирование
скорости АД при изменениях нагрузки
(рис. 5.30). Здесь ТТ и ТН – трансформаторы
тока и напряжения , обеспечивающие
питание обмоток подмагничивания СМУ
для реализации соответствующих обратных
связей. Так как момент двигателя не
пропорционален току статора и зависимость
эта нелинейна, то обратная связь по току
статора заменяется обратной связью
непосредственно по электромагнитному
моменту при помощи датчика Холла,
встраиваемого в воздушном зазоре под
полюсом. Такие машины со в
обеспечивает автоматическое регулирование
скорости АД при изменениях нагрузки
(рис. 5.30). Здесь ТТ и ТН – трансформаторы
тока и напряжения , обеспечивающие
питание обмоток подмагничивания СМУ
для реализации соответствующих обратных
связей. Так как момент двигателя не
пропорционален току статора и зависимость
эта нелинейна, то обратная связь по току
статора заменяется обратной связью
непосредственно по электромагнитному
моменту при помощи датчика Холла,
встраиваемого в воздушном зазоре под
полюсом. Такие машины со в строенными
датчиками Холла отечественное
электромашиностроение еще не производит.
строенными
датчиками Холла отечественное
электромашиностроение еще не производит.
![]()
Реверсивный
асинхронный электропривод с СМУ для
регулирования скорости получается
очень громоздким и сложным, так как
необходимы два дросселя с подмагничиванием
для изменения чередования фаз на статоре
АД (и в каждом СМУ – несколько обмоток
управления для формирования различных
обратных связей ) .Сопротивление фаз
рабочих обмоток СМУ не столь велико,
чтобы полностью устра-нить
уравни-тельные токи
(рис. 5.31) , замы-кающиеся
через эти обмотки, ми-нуя
АД, что приводит к асим-метрии
н апря-жений
на ста-торах. Поэтому
реверс АД осуществляется, с помощью
контак-торов, меняющих
чередование фаз на статоре. На рисунке
5.31 показаны лишь рабочие обмотки СМУ и
( штрихпунктиром ) контуры уравнительных
токов.
апря-жений
на ста-торах. Поэтому
реверс АД осуществляется, с помощью
контак-торов, меняющих
чередование фаз на статоре. На рисунке
5.31 показаны лишь рабочие обмотки СМУ и
( штрихпунктиром ) контуры уравнительных
токов.
15.7 Регулирование скорости асинхронных двигателей с помощью тиристорного регулятора напряжения на статоре (ТРН-АД )
Эта система
регулирования скорости АД представляет
собой логическое развитие системы
регулирования с ДН в цепи статора. Вместо
реактив-ного сопротивле-ния
(дросселя насыщения ) в цепь статора
вклю-чен тиристорный
регулятор напря-жения
(ТРН ), в котором меняется угол запаздывания
(![]() )
открывания тиристоров по отношению к
началу полуволны фазного напряжения
сети (рис. 5.32).
)
открывания тиристоров по отношению к
началу полуволны фазного напряжения
сети (рис. 5.32).
Изменение![]() от
нуля до 1500-1600 соответствует
изменению напряжения на двигателе от
UСЕТИ до нуля.
от
нуля до 1500-1600 соответствует
изменению напряжения на двигателе от
UСЕТИ до нуля.
К ривая
напряжения на статоре, питающая через
ТРН имеет 5-ю, 7-ю, 11-ю и другие нечетные
и некратные трем гармоникам. Однако
амплитуды этих гармоник невелики и
практически не влияют на развиваемый
двигателем момент. Система управления
тиристорами (СУТ ) в ТРН получает сигнал
UУ, определяемый
разностью задающего напряжения сравнения
UСР и напряжения UТ
тахогенератора. Таким образом при UУ=
UСР – UТ
обеспечивается введение в систему
регулирования скорости жесткой
отрицательной обратной связи по
напряжению тахогенератора GT,то
есть обратную связь по скорости.
ривая
напряжения на статоре, питающая через
ТРН имеет 5-ю, 7-ю, 11-ю и другие нечетные
и некратные трем гармоникам. Однако
амплитуды этих гармоник невелики и
практически не влияют на развиваемый
двигателем момент. Система управления
тиристорами (СУТ ) в ТРН получает сигнал
UУ, определяемый
разностью задающего напряжения сравнения
UСР и напряжения UТ
тахогенератора. Таким образом при UУ=
UСР – UТ
обеспечивается введение в систему
регулирования скорости жесткой
отрицательной обратной связи по
напряжению тахогенератора GT,то
есть обратную связь по скорости.
Включение в каждую фазу АД встречно – параллельно двух тиристоров обеспечивает регулирование напряжения для двух полуволн (рис. 5.33). Невыключаемое активное сопротивление в 3-хфазах ротора необходимо для обеспечения более мягких искусственных характеристик разомкнутого электропривода, что несколько улучшает работу системы ТРН-АД.
О днако,
возможно применение такой замкнутой
системы регулирования и для короткозамкнутых
АД. Механические характеристики замкнутой
системы регулирования размещаются
между двумя характеристиками ра-зомкнутой
системы, соответствующими минимальному
углу открытия тиристоров(
днако,
возможно применение такой замкнутой
системы регулирования и для короткозамкнутых
АД. Механические характеристики замкнутой
системы регулирования размещаются
между двумя характеристиками ра-зомкнутой
системы, соответствующими минимальному
углу открытия тиристоров(![]() ) и максимальному значению этого угла
(
) и максимальному значению этого угла
(![]() MAX
MAX![]() град.эл.),
как это показано на рисунке 5.34.
град.эл.),
как это показано на рисунке 5.34.
При таком угле
открывания момент, развиваемый двигателем
,обычно меньше момента статического
сопротивления при холостом ходе (МС.Х).
Таким образом, при работе в замкнутой
системе регулирования скорости по мере
увеличения нагрузки угол![]() должен уменьшаться, увеличивая напряжение
на статоре двигателя. При этом рабочая
точка переходит с одной характеристики
разомкнутой системы на другую образуя
достаточно жесткую механическую
характеристику замкнутой системы (см.
пунктирные характеристики на рисунке
5.34) .
должен уменьшаться, увеличивая напряжение
на статоре двигателя. При этом рабочая
точка переходит с одной характеристики
разомкнутой системы на другую образуя
достаточно жесткую механическую
характеристику замкнутой системы (см.
пунктирные характеристики на рисунке
5.34) .
Уровень скорости двигателя в замкнутой системе определяется величиной напряжения сравнения. Большему значению UCР соответствует большая скорость двигателя.
Н а
входе СУТ может быть включен усилитель,
расчет необходимой величины, коэффициенты
усиления которого приведен в [4].
а
входе СУТ может быть включен усилитель,
расчет необходимой величины, коэффициенты
усиления которого приведен в [4].
Рассмотренная
система регулирования скорости
обеспечивает диапазон регулирования
скорости 15![]()
![]() ее целесообразно использовать при
кратковременном режиме работы из-за
наличия повышенных потерь в роторе.
ее целесообразно использовать при
кратковременном режиме работы из-за
наличия повышенных потерь в роторе.
15.8 Регулирование электропривода с помощью асинхронной муфты скольжения
Асинхронная муфта скольжения (АМС) – простое и надежное устройство, с помощью которого можно не только регулировать скорость электропривода, но и предохранять (сглаживать) толчки момента, идущие от АД к рабочей машине или в обратном направлении. Кроме того, АМС служит для улучшения плохих пусковых свойств АД с короткозамкнутым ротором.
Устройство и принцип действия АМС.
Н а
рисунке 5.35 показан разрез АМС, поясняющий
ее устройство и принцип действия.
а
рисунке 5.35 показан разрез АМС, поясняющий
ее устройство и принцип действия.
Муфта состоит из двух частей – ведомой и ведущей.
На внутренней части 1, называемой индуктором , расположена обмотка возбуждения, получающая питание через контактные кольца на валу . Наружная часть 2 муфты, называемая якорем – может быть из шихтованного железа с беличьей клеткой ( как у асинхронного двигателя ) или из массивного железа, в котором при работе муфты индуктируются вихревые токи.
В АМС сочетаются элементы асинхронного двигателя (наличие скольжения) и синхронной машины (поток возбуждения создается обмоткой постоянного тока). Рабочая машина (РМ) и АД могут присоединяться или к индуктору или к якорю АМС.
При вращении муфты
в ее якоре индуктируется ток, взаимодействие
которого с магнитным потоком в индукторе
определяет создание вращающего момента.
Для получения вращающего момента в АМС
обязательно необходимо наличие скольжения
между якорем и индуктором, отсюда и
название муфты – АМС. Муфты такого типа
выпускаются на передачу мощности до
5 00кВт,
мощность обмотки возбуждения составляет
00кВт,
мощность обмотки возбуждения составляет
![]() %
от мощности муфты, причем мощность
возбуждения меньше у муфт большой
мощности. Механические характеристики
АМС из-за большого сопротивления якоря
имеют небольшую жесткость (рис.5.36).
%
от мощности муфты, причем мощность
возбуждения меньше у муфт большой
мощности. Механические характеристики
АМС из-за большого сопротивления якоря
имеют небольшую жесткость (рис.5.36).
Величина момента создаваемого в АМС увеличивается с ростом тока управления iУ (тока возбуждения).
Как и в АД потери
в АМС пропорциональны скольжению, то
есть
![]() ,
где
,
где
![]() –
скорость ведущей части муфты [5].
–
скорость ведущей части муфты [5].
Улучшение пусковых свойств АД. Многие типы АД с короткозамкнутым ротором имеют очень малые пусковые моменты, что делает невозможным их пуск под нагрузкой (рис. 5.37), так как МПУС < МС.
В этом случае АМС
помогает улучшить плохие пусковые
свойства такого асинхронного
электропривода. АД запускается с
невозбужденной муфтой на валу, когда
момент сопротивления движению – это
момент холостого хода МСх <
МПУС. АД разгоняется до скорости
холостого хода![]() ,
после чего АМС постепенно возбуждается,
растет передаваемый ею момент до значения
МС, а скорость снижается до
,
после чего АМС постепенно возбуждается,
растет передаваемый ею момент до значения
МС, а скорость снижается до
![]()
Р
 егулирование
скорости в замкнутой системе осуществляется
путем введения в цепь питания обмотки
возбуждения АМС жесткой отрицательной
обратной связи по скорости (рис. 5.38).
егулирование
скорости в замкнутой системе осуществляется
путем введения в цепь питания обмотки
возбуждения АМС жесткой отрицательной
обратной связи по скорости (рис. 5.38).
С ростом нагрузки уменьшается скорость и напряжение UT тахогенератора GT.
Напряжение управления UУ =UЗ-UT возрастает, увеличивается возбуждение АМС работа осуществляется уже на другой механической характеристике (см. рис. 5.36).
Таким образом, создается жесткая механическая характеристика электропривода в замкнутой системе регулирования (рис. 5.39). Для АМС большой мощности в цепь обмотки возбуждения включается промежуточный усилитель У.
Н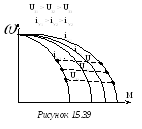 апряжение
задания UЗ определяет
необходимую скорость АМС при МС=Const.
В замкнутых системах с АМС обеспечивается
диапазон регулирования скорости 10
апряжение
задания UЗ определяет
необходимую скорость АМС при МС=Const.
В замкнутых системах с АМС обеспечивается
диапазон регулирования скорости 10![]() .
АМС хорошо зарекомендовали себя в
электроприводе крупных вентиляторов.
.
АМС хорошо зарекомендовали себя в
электроприводе крупных вентиляторов.
Преимущества АМС: удобство управления, плавность регулирования скорости электропривода, малая мощность управления и надежность работы.
Недостаток АМС: малый КПД, габариты муфты соизмеримы с габаритами АД той же мощности, что увеличивает расход материалов и стоимость электропривода с АМС.