

электропривода из одного установившегося состояния в другое. При этом следует помнить, что состояние покоя (=0) это частный случай установившегося движения.
П р и ч и н ы в о з н и к н о в е н и я переходных процессов:
– приложение к двигателю внешних возмущений (так называемых возмущающих воздействий), например, изменение момента сопротивления на валу двигателя;
– приложение управляющих воздействий (подача сигналов на изменение напряжения на обмотках возбуждения или якоря двигателя при пуске, реверсе или торможении);
– случайные возмущения установившегося состояния, например, обрыв проводов в системе управления, колебания напряжения или частоты питающей сети;
– параметрические возмущения в электроприводе, возникающие, например, при изменениях значений сопротивлений в электрических цепях двигателя или преобразователя энергии при колебаниях температуры или при изменениях момента инерции, или движущихся масс, связанных с ведением технологического процесса, или спецификой конструкции механизма.
П е р е х о д н ы е п р о ц е с с ы с у щ е с т в е н н о в л и я ю т на быстродействие электропривода, на стабилизацию регулируемых фазовых координат, на расход энергии в электроприводе, на динамические удары в механической части привода и рабочей машины.
А н а л и з п е р е х о д н ы х п р о ц е с с о в в электроприводе позволяет выяснить влияние на динамические режимы значений отдельных параметров (R, L, J и др.) электрических машин и системы управления, то есть выяснить влияние этих параметров на быстродействие и качество работы электропривода (перерегулирование, колебательность и др.) и наметить пути улучшения динамических режимов работы.
В л и я н и е р а з л и ч н ы х и н е р ц и й, замедляющих протекание переходных процессов в электроприводе, оценивается по изменениям величин соответствующих запасов энергии, накапливаемых в отдельных элементах привода, а именно:
изменение запаса механической (кинетической) энергии, накапливаемой в движущихся элементах привода (
 или
или соответственно при вращательном или
поступательном движении);
соответственно при вращательном или
поступательном движении);
– изменение
запаса электромагнитной энергии в
цепях, содержащих индуктивности (![]() );
);
– изменение запаса
электрической энергии в цепях, содержащих
емкости (![]() );
);
– изменение запаса
тепловой энергии в различных элементах
электропривода (![]() ,
где
,
где![]() – масса молекулы,
– масса молекулы,![]() – число молекул,VСР
– средняя статистическая скорость
молекул).
– число молекул,VСР
– средняя статистическая скорость
молекул).
Обобщая рассмотрение влияния различных инерций на переходные процессы в электроприводе, необходимо отметить, что различные элементы силовой части привода и элементы системы управления можно рассматривать как аккумуляторы различных видов энергии (механической, электромагнитной и др.). Так как процессы преобразования одного вида энергии в другой протекают не мгновенно, а развиваются во времени, то это и приводит к инерционным явлениям, затягивающим переходные процессы в электроприводе и влияющим на их качественный характер.
Изменение запасов различных видов энергий протекает неодинаково быстро, различна инерционность этих процессов. Тепловая инерция в электроприводе значительно больше других инерций и поэтому ее влияние сказывается меньше всего на конечном промежутке времени. Действительно, за время пуска двигателя, например, длящегося несколько десятых долей секунды или несколько секунд, тепловое состояние электрических машин и аппаратов меняется столь незначительно, что оно практически не сказывается на протекании переходных процессов тока, скорости и т.п. Поэтому в расчетах переходных процессов в электроприводе влиянием тепловой инерции пренебрегают, а учитывают лишь электромагнитную, электрическую и механическую инерции (либо одну-две из них). В зависимости от учета различных инерций при анализе переходных процессов в электроприводе различают:
– механические переходные процессы, определяемые лишь влиянием механической инерции в движущихся частях привода;
– электромагнитные переходные процессы, определяемые лишь влиянием электромагнитной инерции в цепях, содержащих индуктивность;
– электрические переходные процессы, определяемые лишь влиянием электрической инерции в цепях, содержащих емкости;
– электромеханические переходные процессы, определяемые совместным влиянием механической и электромагнитной или электрической инерции;
– тепловые переходные процессы, определяемые нагревом или охлаждением элементов в силовой части привода (электрические машины и питающие их преобразователи энергии). Тепловые переходные процессы имеют на много большую инерцию по сравнению с электромагнитной, электрической или механической инерциями. Поэтому в этом разделе курса тепловые переходные процессы не рассматриваются. Далее будем полагать, что за время переходных процессов пуска, реверса, торможения или изменения скорости при приложении нагрузки к двигателю тепловое состояние его (и, следовательно, величины сопротивлений отдельных элементов) остается без изменений. Изменение теплового состояния электропривода рассматривается в другой части курса при изучении вопросов выбора мощности привода по нагреву.
Р а с ч е т ы п е р е х о д н ы х п р о ц е с о в в электроприводах выполняются с использованием аналитических, графических и графоаналитических методов, численных методов с использованием ЭВМ, а также методами физического (электродинамического) и математического моделирования с помощью аналоговых вычислительных машин (АВМ).
Аналитические методы целесообразно использовать в тех случаях, когда уравнения различных элементов силовой части электропривода и его системы управления можно представить в интегрируемых аналитических функциях. С этой целью при математическом описании электропривода делают различные линеаризующие объект допущения. Например, не учитываются нелинейности в магнитной системе электрических машин, не учитываются люфты, зоны нечувствительности, гистерезис и т.п. Достоинство аналитических методов – возможность получения общей качественной оценки переходных процессов, несмотря на принятые допущения (количественная оценка во многих случаях также достаточно точна), возможность выявления влияния отдельных параметров на характер протекания переходных процессов.
При использовании аналитических методов расчета переходных процессов в полной мере сказываются преимущества применения ЭВМ (быстрота и точность решения при принятых допущениях).
Графические и графоаналитические методы применяются в тех случаях, когда для точности решения необходимо учесть какие-либо нелинейные зависимости в электроприводе (нелинейность механической характеристики двигателя, насыщение магнитной системы, изменение момента инерции для кривошипно-шатунного механизма или для барабана моталки прокатного стана и т.д.). Эти методы дают значительно большую точность решения, но не позволяют наглядно выявить влияние на переходный процесс каких-либо параметров электропривода. С этой целью необходимо многократное повторение решений при различном значении варьируемого параметра, что весьма громоздко и требует много времени. Применение ЭВМ при использовании этих методов также возможно, если использовать соответствующие блоки нелинейностей.
Физические методы решения, или моделирование переходных процессов на аналоговых вычислительных машинах (АВМ) одно время получили широкое распространение, так как эти методы позволяют быстро решить задачу, выявить влияние на переходный процесс отдельных параметров, учесть действие нелинейностей.
Физическое моделирование и моделирование переходных процессов с помощью АВМ дает наглядное решение на экране осциллографа, позволяет записать это решение, облегчает поиск оптимального решения.
В настоящее время самое широкое распространение получило структурное моделирование электропривода с помощью различных пакетов прикладных программ (МАСС, SIAM, Matlab-simulink, Kobra и др.) с использованием персональных компьютеров, реализующих цифровые математические модели исследуемых объектов. Структурное моделирование сочетает в себе лучшие стороны всех выше указанных методов (учет нелинейностей и аналитических зависимостей, быстрота решения, возможность выявления влияния отдельных параметров на переходный процесс, возможность быстрого построения графиков переходных процессов при вариации параметров электропривода и др.).
Методика структурного моделирования рассматривается в отдельном курсе и в данном учебном пособии не затрагивается.
![]()
Изложение раздела курса о переходных процессах в электроприводе начнем с изучения более сложной общей задачи – переходных процессов в разомкнутом электроприводе по системе генератор-двигатель (Г-Д) с машинами постоянного тока. Это позволяет изучать переходные процессы дедуктивным методом (т.е. идя от общего к частному) и получить сразу более общую картину сложных явлений с последовательным упрощением их при переходе к рассмотрению различных частных задач.
Кроме того, эта последовательность при изложении переходных процессов, начиная с процессов в системе Г-Д, позволяет быстро получить информацию, необходимую для выполнения курсового проекта.
Изложение последующих разделов курса о переходных процессах в электроприводе ставит своей целью не только ознакомление с характером переходных процессов и влиянием на них различных параметров. Вторая основная цель – освоить методику составления уравнений для описания переходных процессов в разомкнутых и замкнутых системах электропривода, т.е. ознакомиться с общей методологией математического описания динамических режимов работы в сложных многоэлементных электромеханических системах с обратными связями.
3.2 Электромеханические переходные процессы в разомкнутой системе г-д
В системе Г-Д с генератором и двигателем независимого возбуждения возможно двухзонное регулирование скорости:
0<Н – первая зона регулирования при ФД=const и UЯ=var за счет изменения напряжения генератора. Обычно в этой зоне магнитный поток возбуждения двигателя ФД=ФН;
Н<МАКС – вторая зона регулирования при ФД=var и UЯ=UН= const.
Переходные процессы в обеих зонах рассматриваются далее протекающими независимо друг от друга.
Вначале рассмотрим переходные процессы в первой зоне регулирования. Отметим, что при этом в системе Г-Д есть два переходных процесса: электромагнитный переходный процесс тока в обмотке возбуждения генератора – iВ=f(t), а также электромеханические переходные процессы скорости =f(t) и тока якоря i=f(t) в двигателе.
Переходный процесс в обмотке возбуждения генератора протекает независимо от других процессов, он определяется параметрами самой обмотки возбуждения (если не учитывать реакции якоря). Этот переходный процесс является как бы ведущим процессом, или основным. Он определяет протекание электромеханических процессов в якорной цепи и в механической части электропривода. Можно также определить этот процесс как однонаправленный, детектированный процесс, который может управлять процессами в цепи якоря. Процессы же в якорной цепи не могут влиять и управлять процессами в обмотке возбуждения.
Этот ведущий переходный процесс необходимо рассмотреть предварительно и более подробно.
3.2.1 Электромагнитный переходный процесс в обмотке возбуждения генератора и способы его форсирования
И ндуктивность
обмотки возбуждения генератора (LВ)
значительно больше индуктивности LЯ
его якорной обмотки. Поэтому переходный
процесс iВ(t)
протекает медленней, чем i(t).
Например, для генераторов с РН50-100
кВт ТВ=LВ/rВ1
с., для
генераторов с РН1000
кВт ТВ2-3
с. Таким
образом, для крупных электрических
машин переходный процесс iВ(t)
длится (3-4)ТВ,
т.е. 1012С.,
что показывает на необходимость
форсировки процесса возбуждения
генератора в системе Г-Д для повышения
быстродействия электропривода рабочей
машины.
ндуктивность
обмотки возбуждения генератора (LВ)
значительно больше индуктивности LЯ
его якорной обмотки. Поэтому переходный
процесс iВ(t)
протекает медленней, чем i(t).
Например, для генераторов с РН50-100
кВт ТВ=LВ/rВ1
с., для
генераторов с РН1000
кВт ТВ2-3
с. Таким
образом, для крупных электрических
машин переходный процесс iВ(t)
длится (3-4)ТВ,
т.е. 1012С.,
что показывает на необходимость
форсировки процесса возбуждения
генератора в системе Г-Д для повышения
быстродействия электропривода рабочей
машины.
При рассмотрении переходных процессов в обмотке возбуждения генератора и способов форсирования этих процессов делаются следующие допущения, позволяющие аналитическое рассмотрение поставленной задачи в общем виде и с достаточной точностью: не учитывается влияние гистерезиса и вихревых токов в магнитопроводах; не учитывается действие продольной реакции якоря, то есть электрическая машина полагается скомпенсированной, что достаточно справедливо для современных машин средней и большой мощности, имеющих компенсационные обмотки; характеристика намагничивания генератора полагается линейной и проходящей через начало координат, то есть не учитывается насыщение магнитной системы.
Два последних допущения позволяют принимать в расчетах LВ=const и независимой от магнитного потока возбуждения ФВ (то есть dФВ/diВ=const).
Для цепи возбуждения генератора при отсутствии добавочных сопротивлений, включенных последовательно с обмоткой (см. рис. 3.1), справедливо следующее соотношение, определяющее закон изменения тока возбуждения:
![]() (3.1)
(3.1)
Это дифференциальное уравнение первого порядка с правой частью. Для решения оно преобразуется к следующему виду:
![]() ,
(3.2)
,
(3.2)
где
![]() – электромагнитная постоянная времени
цепи возбуждения генератора;
– электромагнитная постоянная времени
цепи возбуждения генератора;
![]() –установившийся
номинальный ток возбуждения генератора.
–установившийся
номинальный ток возбуждения генератора.
Решение канонического уравнения (3.2) ищется в виде:
![]() ,
(3.3)
,
(3.3)
где
![]() – частное решение, представляющее
установившееся значение тока возбуждения,
величина которого определяется из (3.2)
приt=,
т.е. при
– частное решение, представляющее
установившееся значение тока возбуждения,
величина которого определяется из (3.2)
приt=,
т.е. при
![]() ,
а именно:
,
а именно:
![]() ,
,
С1 – постоянная интегрирования, определяемая по начальным условиям.
В общем случае при t=0, iВ= iВнач, и из (3.3) следует
![]() ;
;
![]() .
.
р – корень характеристического уравнения, соответствующего дифференциальному уравнению (3.2), а именно:
![]() ,
откуда
,
откуда
![]() .
.
Подставляя в (3.3) значения С1, С2 и р, получим после небольших преобразований:
![]() (3.4)
(3.4)
При нулевых
начальных условиях и
![]()
![]() (3.5)
(3.5)
Кривая переходного процесса тока возбуждения генератора (экспонента 1) показана на рисунке 3.2.
Ф орсировка
процессаiВ(t)
может быть
получена при уменьшении постоянной
времени ТВ
цепи возбуждения, что произой-дет
при включении последовате-льно
с обмоткой возбуждения добавочного
сопротивления rФ,
назы-ваемого
форсировоч-ным
сопро-тивлением
(см. рис. 3.3).
орсировка
процессаiВ(t)
может быть
получена при уменьшении постоянной
времени ТВ
цепи возбуждения, что произой-дет
при включении последовате-льно
с обмоткой возбуждения добавочного
сопротивления rФ,
назы-ваемого
форсировоч-ным
сопро-тивлением
(см. рис. 3.3).
О днако
следует иметь в виду, что ускоряет
процессы в цепи возбуждения не уменьшениеТВ,
а большее количество энергии, «загоняемой»
в эту цепь. А чтобы установившееся
значение тока возбуждения оставалось
неизменным, в цепь включают добавочное
сопротивление rФ,
что формально
как бы ускоряет процесс за счет уменьшения
ТВ.
днако
следует иметь в виду, что ускоряет
процессы в цепи возбуждения не уменьшениеТВ,
а большее количество энергии, «загоняемой»
в эту цепь. А чтобы установившееся
значение тока возбуждения оставалось
неизменным, в цепь включают добавочное
сопротивление rФ,
что формально
как бы ускоряет процесс за счет уменьшения
ТВ.
В этом случае
постоянная времени цепи возбуждения
(![]() )
уменьшится, так как
)
уменьшится, так как![]() ,
и процессiВ(t)
пойдет быстрее (кривая 2), стремясь к
установившемуся значению
,
и процессiВ(t)
пойдет быстрее (кривая 2), стремясь к
установившемуся значению
![]() , если напряжение питания обмотки не
изменится (UВ=UВН).
, если напряжение питания обмотки не
изменится (UВ=UВН).
Чтобы сохранить установившееся значение тока возбуждения на прежнем уровне (iВ=iВН), необходимо увеличить напряжение питания обмотки в раз, где
![]() (3.6)
(3.6)
Коэффициент называется расчетным коэффициентом форсирования.
При указанном способе форсирования переходный процесс iВ(t) будет описываться следующим дифференциальным уравнением:
![]() ,
,
решение которого аналогично решению уравнения (3.1). При нулевых начальных условиях (см. кривую 2 на рис. 3.2):
![]() .
(3.7)
.
(3.7)
Процесс iВ(t) по экспоненте 2 очень неравномерен. Примерно за 25% времени процесса iВ достигает значения (0,6-0,65) iВН. Остальное время процесс «дотягивается».
Кроме того, при этом способе форсирования увеличиваются потери в цепи обмотки возбуждения.
Для получения равномерной форсировки переходного процесса iВ(t) и, следовательно, равномерного процесса ЕГ(t) применяется схема питания обмотки по рисунку 3.3, в котором на период переходного процесса сопротивление rФ закорачивается контактом форсирования КФ, а напряжение питания UВ=UВН.
В этом случае
![]() (как и для кривой 1), а установившееся
значение тока возбуждения увеличивается
в
раз (
(как и для кривой 1), а установившееся
значение тока возбуждения увеличивается
в
раз (![]() ).
Переходный процессiВ(t)
при нулевых начальных условиях описывается
уравнением:
).
Переходный процессiВ(t)
при нулевых начальных условиях описывается
уравнением:
![]() ,
(3.8)
,
(3.8)
а график его показан на рисунке 3.2 экспонентой 3.
Когда ток возбуждения достигает значения iВ=iВН, производится так называемая отсечка форсирования, дальнейший рост iВ прекращается (в реальных условиях при отсечке форсирования имеет место незначительное перерегулирование).
Последний способ форсирования, обеспечивающий равномерный переходный процесс iВ(t), получил наибольшее распространение.
Рассмотрим вопрос практической целесообразности в выборе значения коэффициента форсирования .
Для этого по уравнению (3.8) определим время tХ (см. рис. 3.2), за которое ток возбуждения достигает номинального значения (iВ=iВН):
![]() ,
,
откуда
![]()
![]() .
.
Из этого соотношения получается, что
![]() .
(3.9)
.
(3.9)
На рисунке 3.4
показана кривая
![]() ,
построенная по уравнению (3.9).
,
построенная по уравнению (3.9).
Эта кривая показывает, что существенный выигрыш во времени переходного процесса будет при значениях =3-4, а дальнейшее увеличение теряет смысл, так как дальнейшее уменьшение времени переходного процесса незначительно, а к цепи возбуждения надо приложить весьма большое напряжение (UВН), что требует применения нестандартных возбудителей и повышения класса изоляции.
П рактически
коэффициент форсирования выбирают не
более=2-3.
Но выбранное значение
должно быть обязательно проверено
расчетом по допустимому коммутационному
максимуму тока якоря при реверсе
двигателя вхолостую. Этот расчет будет
показан далее при рассмотрении переходных
процессов реверса двигателя в системе
Г-Д.
рактически
коэффициент форсирования выбирают не
более=2-3.
Но выбранное значение
должно быть обязательно проверено
расчетом по допустимому коммутационному
максимуму тока якоря при реверсе
двигателя вхолостую. Этот расчет будет
показан далее при рассмотрении переходных
процессов реверса двигателя в системе
Г-Д.
Недостатком схемы форсирования по рисунку 3.3 является необходимость в сопротивлении и в контакте для закорачивания этого сопротивления в нужный момент времени.
Применяемые на
практике системы Г-Д, как правило,
являются замкнутыми, вследствие чего
реальные коэффициенты форсирования в
них больше указанного значения =2-3.
Например, если в качестве возбудителя
генератора применяется стандартный
унифицированный вентильный преобразователь
с Еd0=1,35400=540
В, то
коэффициент форсирования в такой системе
Г-Д при UВН=90-100
В составит
![]() .
.
![]()
Существуют и другие, бесконтактные способы форсирования переходного процесса возбуждения генератора. Например, в системе Г-Д с возбудителем генератора ВГ (см. рис. 3.5), инерционность которого не учитывается как весьма малая (например, это вентильный возбудитель), форсировка обеспечивается включением обмотки генератора на разность двух напряжений – UВ и UГ.
Рисунок 3.5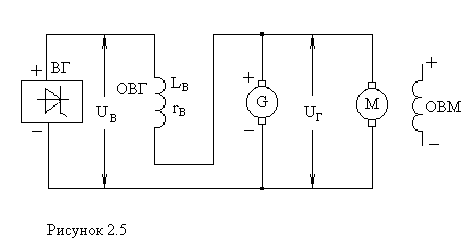
Уравнение электрического равновесия цепи возбуждения в данном случае запишется следующим образом:
![]() .
.
Пренебрегая падением напряжения в обмотке якоря генератора, то есть, считая, что UГЕГ, и полагая магнитную систему генератора ненасыщенной, когда ЕГ=КiВ, это исходное уравнение электрического равновесия в цепи возбуждения можно преобразовать следующим образом:
![]() ,
,
откуда
![]() ,
(3.10)
,
(3.10)
где
![]() – эквивалентное значение постоянной
времени цепи возбуждения генератора.
– эквивалентное значение постоянной
времени цепи возбуждения генератора.
![]() ,
что свидетельствует об уменьшении
времени переходного процесса, т.е. о
форсировании.
,
что свидетельствует об уменьшении
времени переходного процесса, т.е. о
форсировании.
Решение уравнения (3.10) при нулевых начальных условиях следующее:
![]() ,
(3.11)
,
(3.11)
где
![]() .
.
Здесь коэффициент пропорциональности К (крутизна линейной кривой намагничивания) играет роль как бы добавочного сопротивления.
В первый момент включения схемы, когда UГ=0, форсирование переходного процесса максимально, а затем форсировка постепенно уменьшается с ростом UГ. Достоинство этой схемы – ее бесконтактность и отсутствие дополнительных потерь в цепи возбуждения на добавочном (форсировочном) сопротивлении.
Аналогичный результат может быть получен при встречном включении двух обмоток возбуждения генератора (см. рис. 3.6).
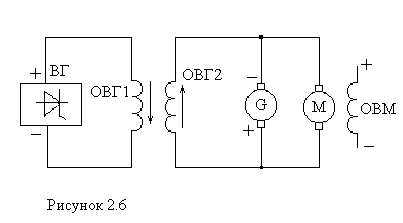
Рисунок 3.6
При принятом выше допущении о линейности кривой намагничивания генератора ЭДС его (при Г=const) пропорциональна iВ. Поэтому переходный процесс ЕГ(t) будет описываться уравнением
![]() ,
(3.12)
,
(3.12)
которое будет использовано в дальнейшем при рассмотрении переходных процессов в системе Г-Д.
![]()
Д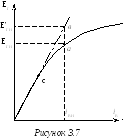 ля
реальных электрических машин точкаЕГН
находится на начальной части «колена»
кривой намагничивания (см. рис. 3.7). Более
точный расчет переходных процессов
ЕГ(t)
можно сделать, если учесть нелинейность
кривой намагничивания по методу,
предложенному проф. Морозовым Д.П.
ля
реальных электрических машин точкаЕГН
находится на начальной части «колена»
кривой намагничивания (см. рис. 3.7). Более
точный расчет переходных процессов
ЕГ(t)
можно сделать, если учесть нелинейность
кривой намагничивания по методу,
предложенному проф. Морозовым Д.П.
Рассмотрим ряд следующих рассуждений.
Если бы генератор работал с форсировкой при коэффициенте форсирования и линейной кривой намагничивания, то при токе iВН установившееся значение ЭДС равнялось бы ЕГН (точка «в»), и в этом случае было бы справедливо уравнение
![]() .
(3.13)
.
(3.13)
В реальных условиях это уравнение справедливо лишь в линейной части характеристики (то есть до точки «с»). Учет нелинейности производится введением в это уравнение коэффициента насыщения магнитной системы генератора (). Этот коэффициент определяется из графического построения, показанного на рисунке 3.7, путем вычисления величины ЕГН на продолжении линейного участка кривой холостого хода генератора
![]() .
(3.14)
.
(3.14)
Ясно, что для ненасыщенных машин =1. С учетом значения коэффициента уравнение (3.13) переходного процесса ЕГ(t) принимает вид:
![]()
или
![]() ,
(3.15)
,
(3.15)
где
![]() – так называемыйполный
коэффициент форсирования.
– так называемыйполный
коэффициент форсирования.
Таким образом, увеличение насыщения магнитной системы (увеличение коэффициента ) при прочих равных условиях способствует форсированию переходных процессов также, как и увеличение напряжения цепи возбуждения.