

Время разгона механизма до скорости v при пуске и время торможения от этой скорости до нуля соответственно равны:
![]() ;
;
![]() ,
(2.1)
,
(2.1)
где аП и аТ – ускорение механизма при пуске и торможении привода.
При заданных величинах статической и динамической нагрузок на валу электропривода, при принятых значениях среднего пускового и тормозного моментов предварительно выбранного электродвигателя величины аП и аТ будут постоянны.
Суммарный путь, пройденный механизмом за периоды пуска и торможения,
![]() .
(2.2)
.
(2.2)
Задаваясь различными скоростями перемещения механизма в пределах от нуля до установившейся скорости vУ, определяют tП, tТ, SП и SТ, необходимые для построения кривой t=f(S).
Линейные ускорения и замедления механизма определяются из уравнения движения электропривода при помощи так называемого спрямляющего числа ν, устанавливающего связь между скоростью электродвигателя и линейной скоростью рабочего механизма:
![]() .
(2.3)
.
(2.3)
С учетом (2.3) динамический момент на валу электродвигателя запишется следующим образом:
![]() .
(2.4)
.
(2.4)
Из (2.4) находим
![]() .
(2.5)
.
(2.5)
Соответственно для периодов пуска и торможения
![]() ;
;
![]() ;
(2.6)
;
(2.6)
![]() ;
;
![]() .
(2.7)
.
(2.7)
Спрямляющее число для некоторых механизмов определяется следующим образом:
для нажимного устройства с шагом винта h и передаточным числом редуктора i –
![]() ,
(2.8)
,
(2.8)
для рольганга с диаметром ролика dР –
![]() ,
(2.9)
,
(2.9)
для манипулятора с диаметром начальной окружности реечной шестерни dШ –
![]()
 .
(2.10)
.
(2.10)
Расчет кривой t=f(S) по приведенным выше соотношениям можно свести в простейшую таблицу.
В практике проектирования встречается необходимость быстрого построения и перестроения вспомогательных кривых t=f(S) для различных условий пуска и торможения. Описанный способ расчета этих кривых несколько громоздок и требует относительно большой затраты времени. Ниже приведен предложенный автором более простой метод построения кривых t=f(S) по исходным значениям МП, МТ, МС, J и γ [4].
На рисунке 2.2 показана треугольная тахограмма работы механизма с ускорением аП и замедлением аТ, построенная для случая разгона до установившейся скорости vУ. Суммарное перемещение механизма за периоды разгона и торможения в этом случае будем называть критическим (SКР). Оно равно площади тахограммы, т.е.
![]() .
(2.11)
.
(2.11)
Проведя отрезок
DЕ
параллельно ВС, получим треугольник,
представляющий тахограмму работы
механизма при разгоне до скорости
![]() ,
причем в этом случае путь, пройденный
механизмом, определится как площадь
тахограммы ОDЕ:
,
причем в этом случае путь, пройденный
механизмом, определится как площадь
тахограммы ОDЕ:
![]() .
(2.12)
.
(2.12)
Из отношения
![]() можно определить закон измененияti=f(SКР).
Так как ΔОВС∞ΔОDЕ,
то
можно определить закон измененияti=f(SКР).
Так как ΔОВС∞ΔОDЕ,
то
![]() .
(2.13)
.
(2.13)
Из соотношений (2.11), (2.12) и (2.13) получим:
 ,
(2.14)
,
(2.14)
откуда
![]() .
.
Так как
![]() ,
то
,
то
![]() .
(2.15)
.
(2.15)
Выражение (2.15) представляет собой уравнение параболы с параметром
![]() .
(2.16)
.
(2.16)
Подставив в (2.16) выражения для аП и аТ из (2.6) и (2.7), получим:
![]() .
.
Назовем
![]() эквивалентным динамическим моментом
привода. Тогда параметр параболы
эквивалентным динамическим моментом
привода. Тогда параметр параболы![]() будет определяться по формуле
будет определяться по формуле
![]() .
(2.17)
.
(2.17)
Таким образом, парабола t=f(S) описывается уравнением
![]() .
(2.18)
.
(2.18)
Построение кривой t=f(S) по уравнению (2.18) показано на рисунке 2.3.
В начале по формуле
(2.18) определяется время перемещения
![]() для любого значения
для любого значения![]() (целесообразнее всего определитьtКР
для критического перемещения SКР).
Найденная точка отмечается на координатной
системе t
– S
(точка М на рис. 2.3). Из точки М провидится
прямая, параллельная оси абсцисс, до
пересечения с осью ординат в точке N.
(целесообразнее всего определитьtКР
для критического перемещения SКР).
Найденная точка отмечается на координатной
системе t
– S
(точка М на рис. 2.3). Из точки М провидится
прямая, параллельная оси абсцисс, до
пересечения с осью ординат в точке N.
О
 трезкиON
и NM
делятся на равное число частей. Из точек
1, 2, 3 и т.д. на отрезке ОN
проводятся прямые, параллельные OS,
а точки 1, 2, 3 и т.д. на отрезке NM
соединяются с центром координат.
Пересечения одноименных прямых дают
точки а,
b,
с
и т.д. искомой параболы t=f(S).
трезкиON
и NM
делятся на равное число частей. Из точек
1, 2, 3 и т.д. на отрезке ОN
проводятся прямые, параллельные OS,
а точки 1, 2, 3 и т.д. на отрезке NM
соединяются с центром координат.
Пересечения одноименных прямых дают
точки а,
b,
с
и т.д. искомой параболы t=f(S).
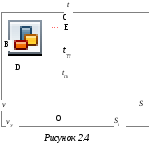
По кривой t=f(S)
и тахограмме при разгоне до скорости
vУ
можно легко определить время пуска и
торможения электропривода при перемещении
механизма на любую величину
![]() ,
как это показано на рисунке 2.4. Для
заданного перемещения
,
как это показано на рисунке 2.4. Для
заданного перемещения![]() по кривойt=f(S)
определяется суммарное время движения
по кривойt=f(S)
определяется суммарное время движения
![]() (отрезок ОЕ). Из точки Е проводится прямая
ЕD
параллельно стороне СВ тахограммы. Из
точки D
на ось t
опускается перпендикуляр, делящий
отрезок ОЕ на две части, соответствующие
времени пуска (tПi)
и времени торможения (tТi)
электропривода.
(отрезок ОЕ). Из точки Е проводится прямая
ЕD
параллельно стороне СВ тахограммы. Из
точки D
на ось t
опускается перпендикуляр, делящий
отрезок ОЕ на две части, соответствующие
времени пуска (tПi)
и времени торможения (tТi)
электропривода.
Время движения, определяемое указанным методом, используется при расчетах эквивалентного тока или момента предварительно выбранного двигателя.
2.2 Метод эквивалентных ускорений
Расчет эквивалентного тока, момента или мощности электродвигателей, работающих по программе заданных перемещений, может быть выполнен с использованием показанного в 2.1 метода построения вспомогательных кривых t=f(S) для определения времени движения. Этот способ пригоден лишь для треугольных тахограмм. В случае работы электропривода по трапецеидальной тахограмме расчет еще более усложняется, особенно тогда, когда необходимо выполнить несколько расчетных вариантов, требующих построения серии вспомогательных кривых.
Ниже излагается разработанный автором метод определения эффективной нагрузки электродвигателя непосредственно по величине перемещений без построения вспомогательных кривых, что значительно сокращает и упрощает вычислительные операции. Этот метод дает возможность быстро выполнить ряд вариантных расчетов по аналитическим формулам [4].
Эквивалентное
ускорение.
При работе на треугольной тахограмме
при
![]() справедливы следующие соотношения,
вытекающие из законов равноускоренного
движения:
справедливы следующие соотношения,
вытекающие из законов равноускоренного
движения:
![]() ;
;
![]() ;
;![]() ,
(2.19)
,
(2.19)
где S – полное перемещение механизма за период включения; v – максимальная скорость, достигаемая при данном перемещении.
Для случая работы
при
![]() величиныt
и S
определяются следующим образом:
величиныt
и S
определяются следующим образом:
![]() ;
(2.20)
;
(2.20)
![]() .
(2.21)
.
(2.21)
Подставив в (2.21) значение t из (2.20), получим:
![]() ;
;
![]() .
(2.22)
.
(2.22)
Заменяя в (2.20) значение v по (2.22), получим после преобразований:
![]() .
(2.23)
.
(2.23)
Из сравнения
выражений (2.19), (2.22) и (2.23) для определения
t,
S
и v
при
![]() и при
и при![]() можно сделать вывод, что при расчетах
механизмов, работающих с неравными
ускорениями и замедлениями, можно
пользоваться простыми формулами, в
которых различные величины
можно сделать вывод, что при расчетах
механизмов, работающих с неравными
ускорениями и замедлениями, можно
пользоваться простыми формулами, в
которых различные величины![]() и
и![]() формально заменены некоторым эквивалентным
ускорением
формально заменены некоторым эквивалентным
ускорением![]() .
.
Сопоставление приведенных выше формул показывает, что величина этого эквивалентного ускорения представляет собой частное от деления квадрата среднего геометрического ускорения на среднее арифметическое:
 .
(2.24)
.
(2.24)
Таким образом, для
общего случая работы по треугольной
тахограмме при
![]() расчеты могут выполняться по формулам:
расчеты могут выполняться по формулам:
![]() ;
;
![]() ;
;![]() .
(2.25)
.
(2.25)
Величина критического перемещения, т.е. перемещения за периоды пуска и торможения при достижении механизмом установившейся скорости vУ, равна
![]() .
(2.26)
.
(2.26)
Р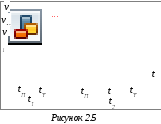 асчет
времени включения электропривода.
Рассмотрим наиболее общий случай работы
механизма по заданной программе
перемещений, когда
асчет
времени включения электропривода.
Рассмотрим наиболее общий случай работы
механизма по заданной программе
перемещений, когда
![]() ,
,![]() ,
и тахограмма состоит из треугольных и
трапецеидальных участков (рис. 2.5). При
этом для некоторых перемещений механизма
,
и тахограмма состоит из треугольных и
трапецеидальных участков (рис. 2.5). При
этом для некоторых перемещений механизма![]() ,
а для остальных
,
а для остальных![]() .
.
Суммарное время
работы для треугольного участка согласно
(2.25) равно
![]() ,
а для нескольких треугольных участков
,
а для нескольких треугольных участков
![]() .
(2.27)
.
(2.27)
Продолжительность периодов пуска и торможения для трапецеидальных участков составит:
![]() ,
(2.28)
,
(2.28)
а время работы с установившейся скоростью
![]() .
(2.29)
.
(2.29)
Таким образом, полное время работы для трапецеидального участка тахограммы
![]() ,
(2.30)
,
(2.30)
а для т участков
![]() .
(2.31)
.
(2.31)
Суммарное время включения электропривода за цикл с несколькими треугольными и т трапецеидальными тахограммами составит:
![]() (2.32)
(2.32)
причем в этом
выражении для определения
![]() учитываются лишь те перемещения, для
которых
учитываются лишь те перемещения, для
которых![]() ,
а для определения
,
а для определения![]() суммирование производится для перемещений
суммирование производится для перемещений![]() .
.
Расчет эквивалентной нагрузки. Эквивалентный ток повторно-кратковременного режима определяется по выражению:
 ,
(2.33)
,
(2.33)
где
![]() – эффективная нагрузка при работе с
треугольной тахограммой;
– эффективная нагрузка при работе с
треугольной тахограммой;
![]() –эффективная
нагрузка при работе с трапецеидальной
тахограммой.
–эффективная
нагрузка при работе с трапецеидальной
тахограммой.
Для треугольных
участков тахограммы суммарное время
работы электропривода за периоды пуска
(![]() )
и за периоды торможения (
)
и за периоды торможения (![]() )
определяется по величине перемещений
следующим образом:
)
определяется по величине перемещений
следующим образом:
![]() ;
;
![]() .
(2.34)
.
(2.34)
С учетом этих
выражений величина
![]() после преобразований представится в
виде
после преобразований представится в
виде
![]() .
(2.35)
.
(2.35)
Для т трапецеидальных участков тахограммы суммарное время работы электропривода в периоды пусков и торможений соответственно равно:
![]() ;
;
![]() ,
(2.36)
,
(2.36)
а суммарное время работы с установившейся скоростью
![]() .
(2.37)
.
(2.37)
Эффективная нагрузка электропривода в этом случае с учетом выражений (2.36) и (2.37) после преобразований представится в виде:
![]() (2.38)
(2.38)
Подставляя в (2.33)
значения
![]() из (2.35) и
из (2.35) и![]() из (2.38), а также значение
из (2.38), а также значение![]() из (2.32), получим окончательную расчетную
формулу для определения эквивалентного
тока повторно-кратковременного режима
работы с заданной программой перемещений:
из (2.32), получим окончательную расчетную
формулу для определения эквивалентного
тока повторно-кратковременного режима
работы с заданной программой перемещений:
(2.39)
В частном случае,
когда
![]() (а это наиболее типичный случай для
систем управления электроприводом,
имеющим регулятор тока с единой установкой
для пуска и торможения), расчетная
формула дляIП.К,
полученная из (2.39), принимает вид:
(а это наиболее типичный случай для
систем управления электроприводом,
имеющим регулятор тока с единой установкой
для пуска и торможения), расчетная
формула дляIП.К,
полученная из (2.39), принимает вид:
 .
(2.40)
.
(2.40)
Время движения электропривода для этого частного случая составит:
![]() .
(2.41)
.
(2.41)
На основании общей
расчетной формулы (2.39) можно получить
более простые зависимости для ряда
других частных случаев, например, для
случая работы с тахограммой, состоящей
только из треугольных элементов, для
случая, когда ![]() ,
и т.д. Все эти расчетные формулы приведены
в [4]. Приведем лишь расчетные формулы
для случая, когда
,
и т.д. Все эти расчетные формулы приведены
в [4]. Приведем лишь расчетные формулы
для случая, когда![]() ,
,![]() и тахограмма работы привода состоит из
треугольных элементов. При этих условиях
и тахограмма работы привода состоит из
треугольных элементов. При этих условиях
 ,
(2.42)
,
(2.42)
![]() .
(2.43)
.
(2.43)
Таким образом,
определение эквивалентного тока
электродвигателя при работе его по
тахограмме с треугольными и трапецеидальными
элементами может быть сделано достаточно
просто и быстро по выведенным аналитическим
формулам, если предварительно определены
величины ускорений (раздел 2.1), критическое
перемещение механизма, а также
![]() при
при![]() и
и![]() при
при![]() .
Если тахограмма содержит лишь треугольные
элементы (что часто встречается при
малых перемещениях механизма), то расчет
еще более упрощается, так как в этом
случае эквивалентный ток электродвигателя
не зависит от суммарного перемещения
механизма, а определяется лишь величинами
ускорений, замедлений и принятыми
значениями пускового и тормозного
токов.
.
Если тахограмма содержит лишь треугольные
элементы (что часто встречается при
малых перемещениях механизма), то расчет
еще более упрощается, так как в этом
случае эквивалентный ток электродвигателя
не зависит от суммарного перемещения
механизма, а определяется лишь величинами
ускорений, замедлений и принятыми
значениями пускового и тормозного
токов.
Выбор мощности двигателя по методу эквивалентных ускорений можно эффективно использовать для позиционных механизмов, работающих по заданной программе малых перемещений (например, для нажимных устройств прокатных станов), особенно в тех случаях, когда необходимо сделать ряд вариантных расчетов при изменении исходных данных, не строя каждый раз нагрузочную диаграмму.
Несмотря на преимущество метода эквивалентных ускорений, заключающееся в расчете по аналитическим формулам без построения нагрузочных диаграмм, этот метод все же является методом последовательных приближений, так как все расчеты выполняются для предварительно выбранного двигателя.