

1.5. Довільна плоска система сил.
1.5.1. Теорема про приведення довільної плоскої системи сил до деякого центру. Головний вектор і головний момент.
Теорема. Приводячи плоску систему сил до деякого центру, отримуємо силу і пару сил.
Нехай на площині розміщено сили F1, F2, … , Fn. (рис.1.5.1.) Приведемо цю систему сил до деякої точки О, що називається центром приведення. Переносячи кожну силу паралельно самій собі в точку О, отримаємо силу і пару сил з моментом, що дорівнює моменту цієї сили відносно точки О. Складуючи геометрично перенесені в точку О сили, отримаємо силу, яка называється головним вектором, та пару сил, момент якої називається головним моментом.
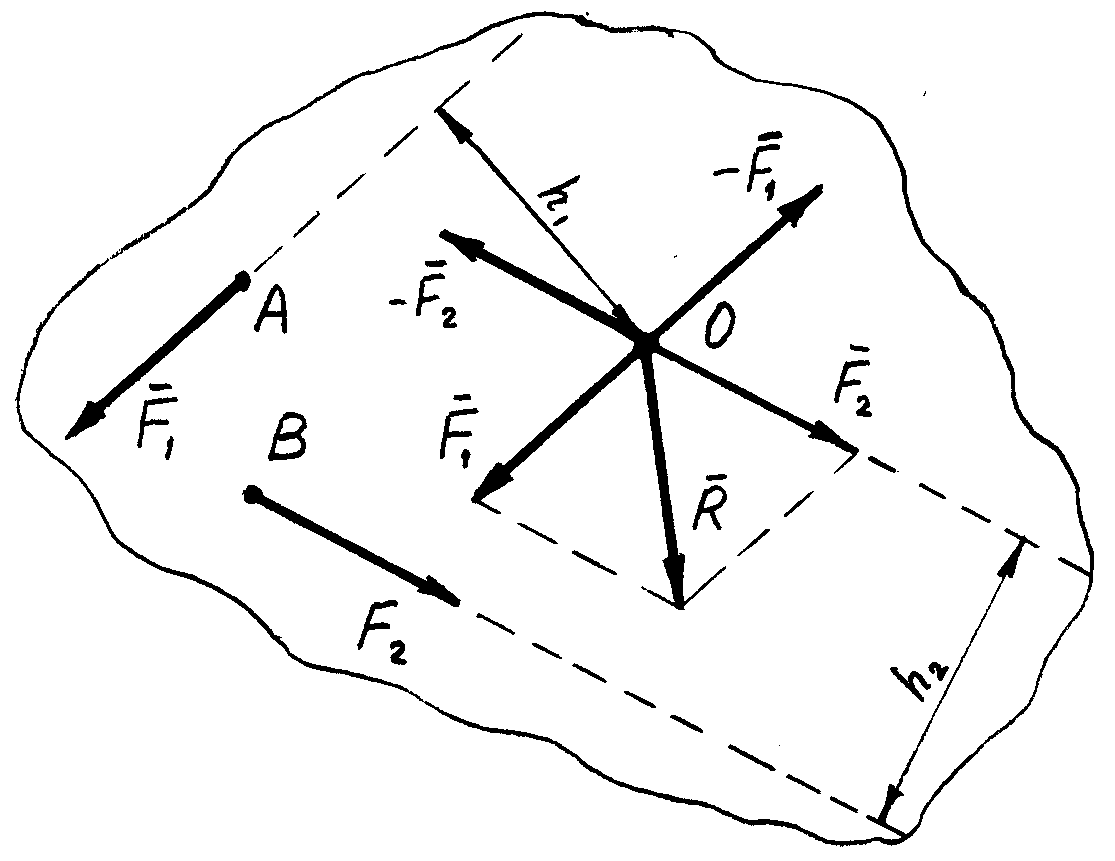
Рис.1.5.1. Приведення довільної плоскої ситеми сил до деякого центру.
Головний вектор R дорівнює векторній сумі сил:
R
= F1
+
F2
+...+ Fn
=
![]() Fi
.
Fi
.
Головний момент дорівнює алгебраїчній сумі моментів усіх сил відносно центру приведення:
M0
=![]() М0(Fi).
М0(Fi).
1.5.2. Умови рівноваги довільної плоскої системи сил.
У випадку рівноваги довільної плоскої системи сил головний вектор и головний момент дорівнюють нулю: R = 0, M0 = 0.
Наведені рівняння є умовами рівноваги довільної плоскої системи сил у векторній формі.
Визначивши проекції головного вектора на осі координат, отримаємо умови рівноваги довільної плоскої системи сил в аналітичній формі:
-

Rx = 0
Ry = 0 або
M0 = 0

 Fxi
=
0
Fxi
=
0 Fyi
=
0 (1.5.1)
Fyi
=
0 (1.5.1) М0
=
0
М0
=
0
Отже, для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб алгебраїчна сума проекцій сил на дві взаємно перпендикулярні осі дорів-нювала нулю, та алгебраїчна сума моментів усіх сил щодо деякої точки також дорівнювала нулю.
Для плоскої довільної системи сил завжди можна скласти тільки три рівняння рівноваги. Якщо число невідомих сил перевищує число рівнянь рівноваги, то задача є статично невизначеною.
Замість рівнянь (1.5.1) можна скласти два рівняння моментів і одне рівняння проекцій сил на одну вісь координат:
-

 Fxi
=
0
Fxi
=
0 MAi
=
0
(1.5.2)
MAi
=
0
(1.5.2) MBi
=
0
MBi
=
0
Або три рівняння моментів щодо трьох точок, що не лежать на одній прямій:
-

 MAi
=
0
MAi
=
0 MBi
=
0
(1.5.3)
MBi
=
0
(1.5.3) MCi
=
0
MCi
=
0
1.5.3. Загальний та окремі випадки рівноваги довільної плоскої системи сил.
У
загальному випадку система приводиться
до головного вектора і головного моменту:
R![]() 0
і M0
0
і M0
![]() 0.
0.
Якщо
R![]() 0,
а M0
=
0,
то в цьому випадку ми маємо плоску
систему сил, що сходяться, тобто лінії
дії всіх сил сходяться в одній точці.
Головний вектор у цьому випадку
називається рівнодіючою силою.
0,
а M0
=
0,
то в цьому випадку ми маємо плоску
систему сил, що сходяться, тобто лінії
дії всіх сил сходяться в одній точці.
Головний вектор у цьому випадку
називається рівнодіючою силою.
Якщо
R
= 0,
а M0![]() 0,
то система приводиться до результуючого
моменту.
0,
то система приводиться до результуючого
моменту.