

Konspekt_lekcii автом.пр.проц.в. маш.(Норко)
.pdf41
Продолжение рис. 2.12.
Рис.2.12. Поперечные сечения лотков: а) с закраинами для стержней; б) открытые для стержней; в) открытые для дисков; г) закрытые с закраинами для дисков; д) закрытые для стержней с головками; е) угловые открытые; ж) радиусные; з) пазовые; и) 7'-образные для колец с пазом; к) стержневые; л) рельсовые; м) круглые одно стержневые; н) круглые рельсов

42
Таблица2.5. Ф ормулы для расчета зазора l в лотке для заготовок с различными торцами (по данным В.П. Боброва.)
1 |
2 |
3 |
4 |
5 |
6 |
Номер эскиза |
формулы |
1, 2, 3, 4, 5, 6 |
∆l =(( ( d2 + l2 ) / (1 +f )) ½) -l . |
43
2.8 Расчёт пропускной способности лотков.
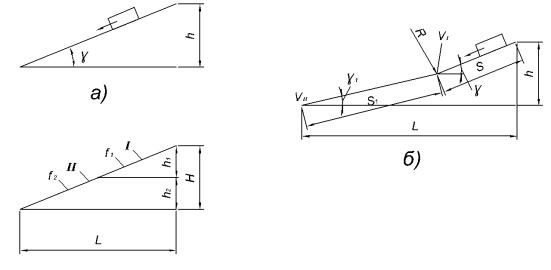
Плавность и скорость перемещения заготовок по лотку зависит от материала заготовки и лотка, размера и шероховатости поверхности скольжения и наклона лотка. Тяжёлые заготовки при всех прочих равных условиях скользят лучше лёгких. На выпуклых и вогнутых участках лотка заготовки перемещаются медленнее, чем на прямолинейных. Наибольшая скорость движения заготовки обеспечивается при выполнении наклонной поверхности в виде циклоиды, а наименьшая - в виде прямой. Если конечная скорость заготовки велика, то для её уменьшения лотки выполняют из двух участков, имеющих разные углы наклона, сопрягаемые по радиусу R, который больше длины заготовки.
в)
Рис. 2.13. Схема движения единичной заготовки по лотку: а) лотоксклиз; б) лоток-склиз, состоящий из двух секций; в) лоток, имеющий секции с разными коэффициентами трения.
На рис.2.13 приведена схема лотка, состоящего из двух наклонных участков. Угол наклона первого участка находится в пределах γ = 250…300, а угол наклона второго участка обязательно меньше угла γ1 трения. Скорость движения заготовки к концу первого участка будет равна: U1=U0 +a1t1 где

44
а- ускорение заготовки на первом участке; t-время прохождения пути s; U0- начальная скорость.
Ускорение заготовки будет равно
a = mg sin γ − fmg cosγ , |
|
1 |
m |
|
|
Время прохождения пути t1 определяется из следующего уравнения
S =U0t + a12t12
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда следует a t2 |
|
|
|
|
|
|
или t |
|
−U |
0 |
+ U |
2 |
+2Sa |
или |
|||||||
+2U t |
−2S |
= 0 |
= |
|
|
|
0 |
1 |
|||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
1 1 |
0 1 |
|
|
|
1 |
|
|
|
|
a1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−U0 + |
U0 +2Sa1 |
|
|
|
|
|
|
|
|
|
||||||
U |
1 |
=U |
0 |
+a |
|
= |
U 2 |
+2Sg(sin γ − f cosγ) |
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
1 |
a1 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Второй участок характеризуется торможением, т.к. угол наклона лоткаγ1
меньше угла трения , т.е.U11=U1-a2t2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Ускорение торможения a2 |
равно a2 |
= g( f cosγ −sin γ) , |
|
|
|
|
||||||||||||||||||||||||||
Время t |
|
равно решению уравнения |
|
S |
=U t |
− |
a t2 |
a t |
2 |
−2U t |
+2S = 0 |
|||||||||||||||||||||
2 |
|
2 2 или |
2 |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 2 |
|
2 |
2 |
1 2 |
1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
отсюда |
|
|
|
|
1 |
+ |
U 2 |
−2S a |
2 |
|
таким образом получим: |
|
|
|
|||||||||||||||||
|
|
|
t2 |
= |
|
|
|
|
11 |
1 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
a2 |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
U |
1 |
+ |
U |
2 |
−2S a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
U |
11 |
=U |
1 |
−a |
|
|
11 |
|
|
|
1 2 |
= U 2 |
− |
2Sa |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
2 |
|
|
|
a2 |
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U11 = |
U12 −2g( f cosγ1 −sin γ1)S2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
где f-коэффициент трения ; S и S1-длины участков лотка (м); g-ускорение свободного падения.(м/с2)
2.9 Устройство подачи ориентированных деталей в серийном производстве
В серийном производстве основным средством подачи и загрузки технологического оборудования является промышленный робот (ПР).
45
Промышленные роботы относятся к классу машин, называемых манипуляторами.
Манипулятор - это устройство, предназначенное для осуществления перемещения тела в пространстве, удерживаемого охватом кистью в ориентированном положении. Траектория движения схвата манипулятора
постоянная. |
|
Промышленный |
робот- это автоматический переналаживаемый |
манипулятор с программным управлением траекторией перемещения схвата манипулятора. Отличительной особенностью ПР является их способность к переналадке, вследствие чего их применение наиболее эффективно в условиях частой смены объектов производства. Промышленные роботы характеризуются следующими показателями:
1.Число степеней подвижности - сумма возможных движений захватного устройства ПР без учёта возможных движений самого схвата.
2.Точность позиционирования - оценивается отклонением центра схвата от заданного положения при многократном повторении роботом рабочего цикла.
3.Рабочая зона ПР - пространство в котором при работе может находиться схват манипулятора.
4.Грузоподъёмность ПР - определяется как суммарная перевозимая схватом масса заготовок.
В зависимости от компоновки механизмов ПР, реализующие отдельные степени подвижности, меняется зона обслуживания, а также способы задания координат точек перемещения схвата.
На рисунках рис. 2.14 и 2.15 приведены основные компоновочные решения ПР, а в табл. 2.6 используемые системы координат, в которых задаются координаты точек траектории перемещения захвата.
Таблица 2.6. Системы координат промышленных роботов

|
46 |
|
|
|
|
|
|
Система |
Рабочая зона |
Параметры рабочей зоны |
|
координат |
|||
|
|
||
|
|
|
|
|
Плоская |
|
|
Декартовая |
|
|
|
Пространственная |
|
||
|
|
||
|
|
|
|
|
Плоская |
|
|
Полярная |
|
|
|
Цилиндрическая |
|
||
|
|
||
|
|
|

47
Сферическая
Цилиндрическая
Сложная полярная
Сферическая

48

49
Продолжение рис.2.14
Рис.2.14 |
Основиые |
конструктивно компоновочные |
схемы |
промышленных |
роботов: |
а- напольно-стреловая;6 — тельферно-стреловая; в |
|
— мосто-стреловая; г — порталъно-стреловая, д — напольно-шарнирно- стреловая; ( - портально-шарннрно-стреловая; ж - напольно-шарнирная; з — тельферно-шарнириая, м – мосто - шарнирная; к- — портально-шарнирная. Стрелками указаны возможные движения роботов и их элементов

50
Рис.2.15 Промышленные роботы,выпускаемые промышленностью:
а) -СМ80Ц 48.11; б)-СМ80Ц.25.01.А; в) - УМ160Ф2.81.01.; г) - СМ40Ф2.80.01; д) - СМ160Ф2.05.01; е)- СМ40Ц 40.11.