


МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФИЛИАЛ ФЕДЕРАЛЬНОГО ГОСУДАРСТВЕННОГО БЮДЖЕТНОГО ОБРАЗОВАТЕЛЬНОГО УЧРЕЖДЕНИЯ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ» В Г. ВЯЗЬМЕ СМОЛЕНСКОЙ ОБЛАСТИ (филиал ФГБОУ ВПО «МГИУ» в г. Вязьме)
КУРСОВАЯ РАБОТА
Структурный анализ, проектирование, кинематический и силовой расчет кривошипно-ползунного механизма двигателя внутреннего сгорания с V-образным расположением цилиндров.
Дисциплина: «Теория
механизмов и машин».
Специальность: 190201 «Автомобиле- и тракторостроение»
Группа: 09Ад31
Студент: Кузьменков
Е.А.
Преподаватель: к.т.н. Осипян В. Г.
2011
Задание на курсовую работу
Кривошипно-ползунный механизм
Рассчитывается и анализируется кинематическая схема кривошипно-ползунного механизма V-образного двигателя внутреннего сгорания. На схеме должно быть обозначено: 1 — кривошип, 2, 4 — шатуны, 3,5 — поршни (ползуны), 6 - неподвижная часть механизма - стойка. Стрелкой показано направление угловой скорости ω. Точки S2, S4 - центры масс шатунов. Длины шатунов одинаковы, т.е. lАВ =lAC. В цилиндре В рабочий ход, в цилиндре С—выпуск, Ps = 0. При силовом расчете вес звеньев Gг — G4 — G, = Gs — 0 (не учитывать).
Обозначения на схеме и в таблице вариантов
H - полный ход поршня [мм];
ß - угол развала цилиндров,
Dn- диаметр поршня [мм];
р
-
давление в цилиндре В
[ ]
]
φ - угол поворота кривошипа, отсчитываемый от линии ОВ0, соответствующей «мертвому» положению первого поршня,
λ= ,где
r
- длина кривошипа [мм],
l
- длина шатунов [мм],
,где
r
- длина кривошипа [мм],
l
- длина шатунов [мм],
S - перемещение поршня от верхней «мертвой» точки [мм],
п - частота вращения кривошипа об/мин
 – отношения,
определяющие положения
центров
масс.
– отношения,
определяющие положения
центров
масс.
|
Вариант |
Н, мм |
l |
Dn, мм |
f1, град |
β, град |
n, об/мин |
|
p,
|
|
10 |
88 |
0,25 |
82 |
45 |
80 |
2400 |
0,33 |
45 |


СОДЕРЖАНИЕ
ВВЕДЕНИЕ………………………………………………………………………6
Глава 1 структурный анализ механизма……………………….7
1.1 Описание механизма……………………………………………..….…..7
1.2Степень подвижности механизма…………………………..………..…8
1.3 Структурные группы механизма……………………………….…..…...9
Глава2 проектирование механизма………………………….…..12
2.1. Определение размеров кривошипа и шатунов…………………………12
2.2.
Построение кинематической схемы
механизма.
Кинематическая схема при заданном
положении
ведущего
звена
 ………………..………....13
………………..………....13
Глава 3 кинематический расчет механизма…………….…...15
3.1 Определение скоростей методом построения их планов…………...… 15
3.1.1 Определение линейных и угловых скоростей……………………..….17
3.1.2 Построение планов скоростей для “мертвых” положений ……....…18
3.1.3 Определение линейных и угловых скоростей……………………...…19
3.2 Определение ускорений методом планов ускорений…………………..20
3.2.1
Построение плана ускорений для угла
поворота
 ………........20
………........20
3.2.2 Определение линейных и угловых ускорений………………………..22
Построение плана ускорений для “мертвых” положений………….. 23
3.2.4Определение линейных и угловых ускорений…………………………24
Глава 4 силовой расчет………………………………………………...25
4.1 Определение веса поршней, шатунов, моментов инерции шатунов...25
4.2 Определение сил, действующих на поршни…………………………….26
4.3 Определение сил инерции для угла поворота 45˚……………………...26
4.4 Определение реакций в кинематических парах………………………...27
4.5 Определение уравновешивающей силы для угла поворота 45˚……....31
4.6.Определение уравновешивающей силы по теореме Жуковского…..…32
4.7 Сравнение величин уравновешивающей силы, полученных двумя способами……………………………………………………………………….33
ЗАКЛЮЧЕНИЕ………………………………………………………………...34
БИБЛИОГРАФИЯ……………………………………………………………..35
ПРИЛОЖЕНИЕ 1……………………………………………………..………..36
ПРИЛОЖЕНИЕ 2………………………………………………………………36
ПРИЛОЖЕНИЕ 3……………………………………………………..………..37
ПРИЛОЖЕНИЕ 4…………………………………………………..….……….38
ПРИЛОЖЕНИЕ 5………………………………………………………………39
ПРИЛОЖЕНИЕ 6………………………………………………………………41
ПРИЛОЖЕНИЕ 7…………………………………………………..……………42
Введение
В курсовой работе по дисциплине «Теория механизмов и машин» необходимо провести структурный анализ, проектирование, кинематический и силовой расчет кривошипно-ползунного механизма двигателя внутреннего сгорания с V-образным расположением цилиндров.
Основными целями и задачами курсовой работы являются:
- определение подвижности механизма и его разделение на более простые составляющие – структурные группы для облегчения силового расчета;
- проектирование механизма и определение его основных размеров;
- нахождение скоростей и ускорения центров масс и угловые скорости ускорения звеньев механизма;
- определение усилий (реакций) в кинематических парах и уравновешивающей силы (уравновешивающего момента). Силовой расчет проводится кинетостатическим методом, то есть учитывает силы и моменты инерции, возникающие при движении механизма;
- сравнение величин уравновешивающей силы, полученных двумя способами.
Глава 1 структурный анализ механизма
1.1 Описание механизма
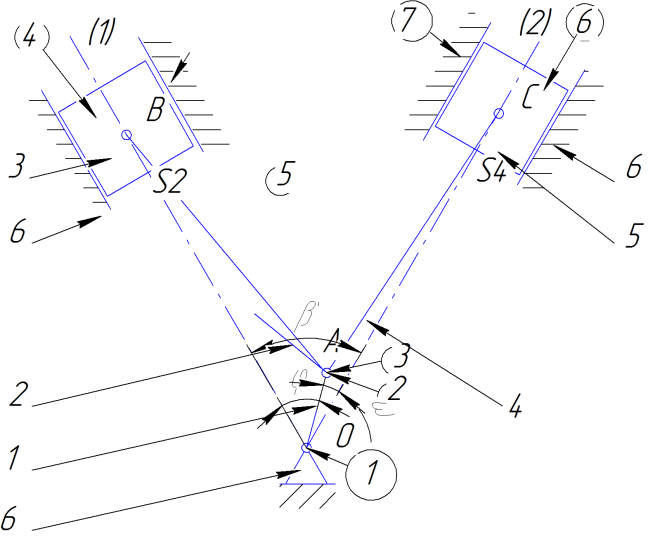
Рисунок 1. Кинематическая схема кривошипно–ползунного механизма
Механизм представляет собой шестизвенный рычажный механизм
Звено 1- кривошип ОА, производящий равномерное вращение вокруг оси.
Звено 2- шатун АВ, совершает плоскопараллельное движение.
Звено 3- ползун В, движется поступательно вдоль прямой ОВ.
Звено 4- шатун АВ, совершает плоскопараллельное движение.
Звено 5- ползун С, движется поступательно вдоль прямой ОС.
Звено 6- неподвижная стойка.
Двигатель двухцилиндровый. Номера цилиндров на рисунке 1 даны в скобках. Параметры механизма изложены в задании на курсовую работу.
Степень подвижности механизма
Движение всех звеньев рассматриваемого кривошипно-ползунного механизма происходит в одной плоскости, соответственно механизм является плоским. Степень подвижности механизма W определяется по формуле Чебышева
 (1.2.1)
(1.2.1)
где n число подвижных звеньев, p5 - число кинематических пар V класса, p4 - число кинематических пар IV класса.
Таблица 1.2.1
Кинематические пары
|
Звенья |
Вид пары |
Подвижность |
Класс |
|
1-6 |
Вращательная В |
низшая |
V |
|
1-2 |
Вращательная В |
низшая |
V |
|
1-4 |
Вращательная В |
низшая |
V |
|
2-3 |
Вращательная В |
низшая |
V |
|
3-6 |
Поступательная П |
низшая |
V |
|
4-5 |
Вращательная В |
низшая |
V |
|
5-6 |
Поступательная П |
низшая |
V |
Кинематические пары - подвижные соединения двух звеньев, отмечены на исходной схеме (рисунок 1) цифрами в кружочке и сведены в таблицу 1.1. Все семь пар обеспечивают контакт по площади и поэтому относятся к низшим парам - парам V класса. Высших кинематических пар - пар IV класса, обеспечивающих контакт в точке или вдоль линии, в данном механизме нет.
В результате: число кинематических пар V класса p5 = 7, число кинематических пар IV класса p4 =0.
Используя формулу 1.2.1 определяем подвижность механизма:

Величина подвижности W=1 говорит о том, что положение механизма в пространстве определяется одной обобщенной координатой. Такой механизм является оптимальным так как он подвижен W>0 и его можно привести в движение одним приводом.