15. Система полярного управления ад. Достоинства и недостатки
Система полярного управления имеет более простую схему чем векторная система.
В системе полярного управления регулируется как амплитуда, так и фаза тока. Эта система обеспечивает поддержку потокосцепления, т.е. система работает гораздо быстрее скалярной системы управления.
Недостаток данной системы в том, что величина потокосцепления может меняться при изменении температуры обмоток двигателя.
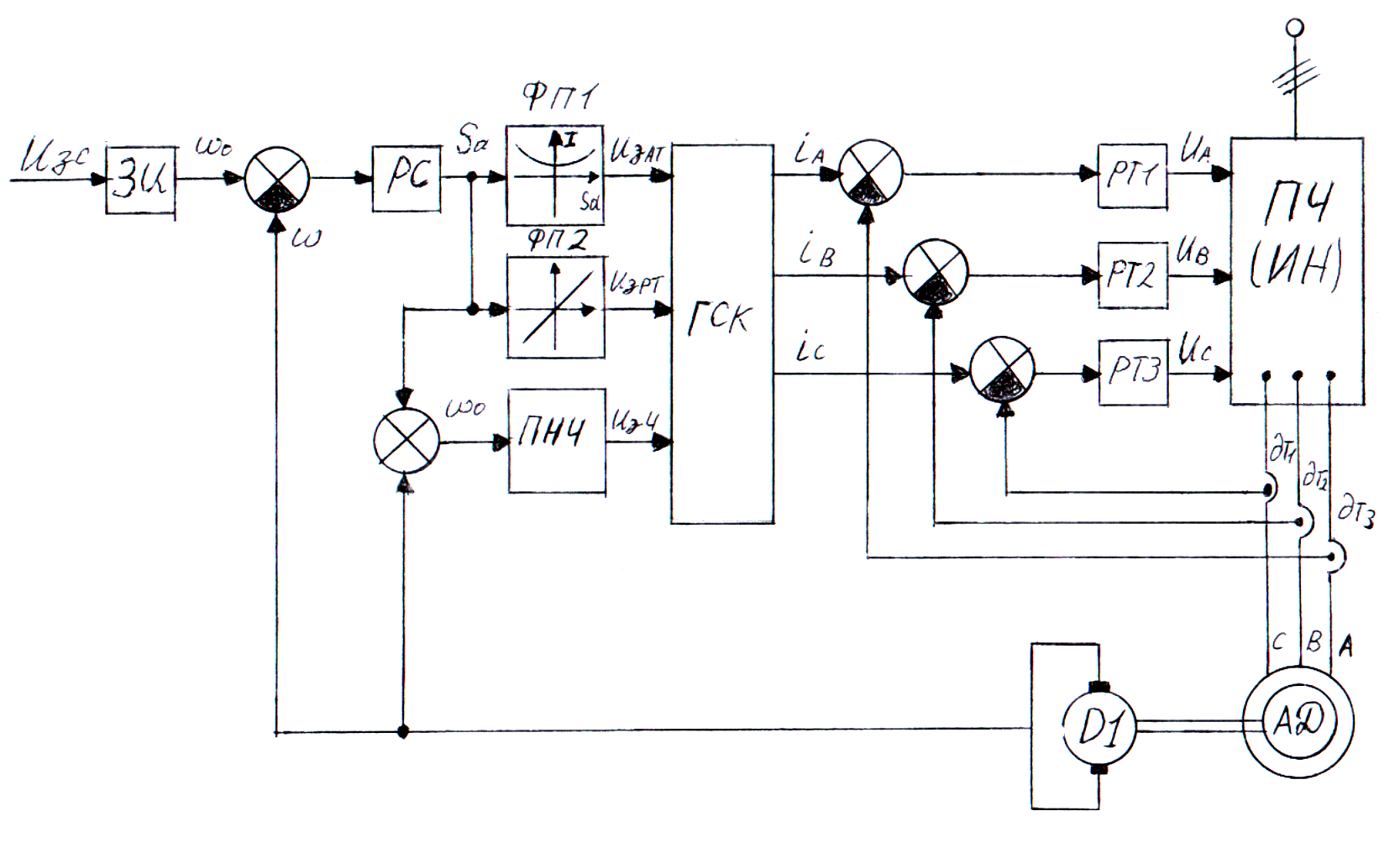
16 Система векторного управления ад. Достоинства и недостатки.
В системах векторного управления АД обеспечивается раздельное регулирование отдельных составляющих тока по оси XиY.
Поток поддерживается на заданном уровне или в системах 2-х зонного регулирования поток может ослабиться.
Система имеет 2-а контура регулирования:
Составляющие тока i1x (РТ), на вход регулятора тока подаются сигнал.
Составляющие тока i1y задание на вход РТ пропорционально абсциссе скольжения подается с регулятора скорости (РС), на входе регулятора скорости суммируется задание на скорость и фактическая скорость движенияw0+w.
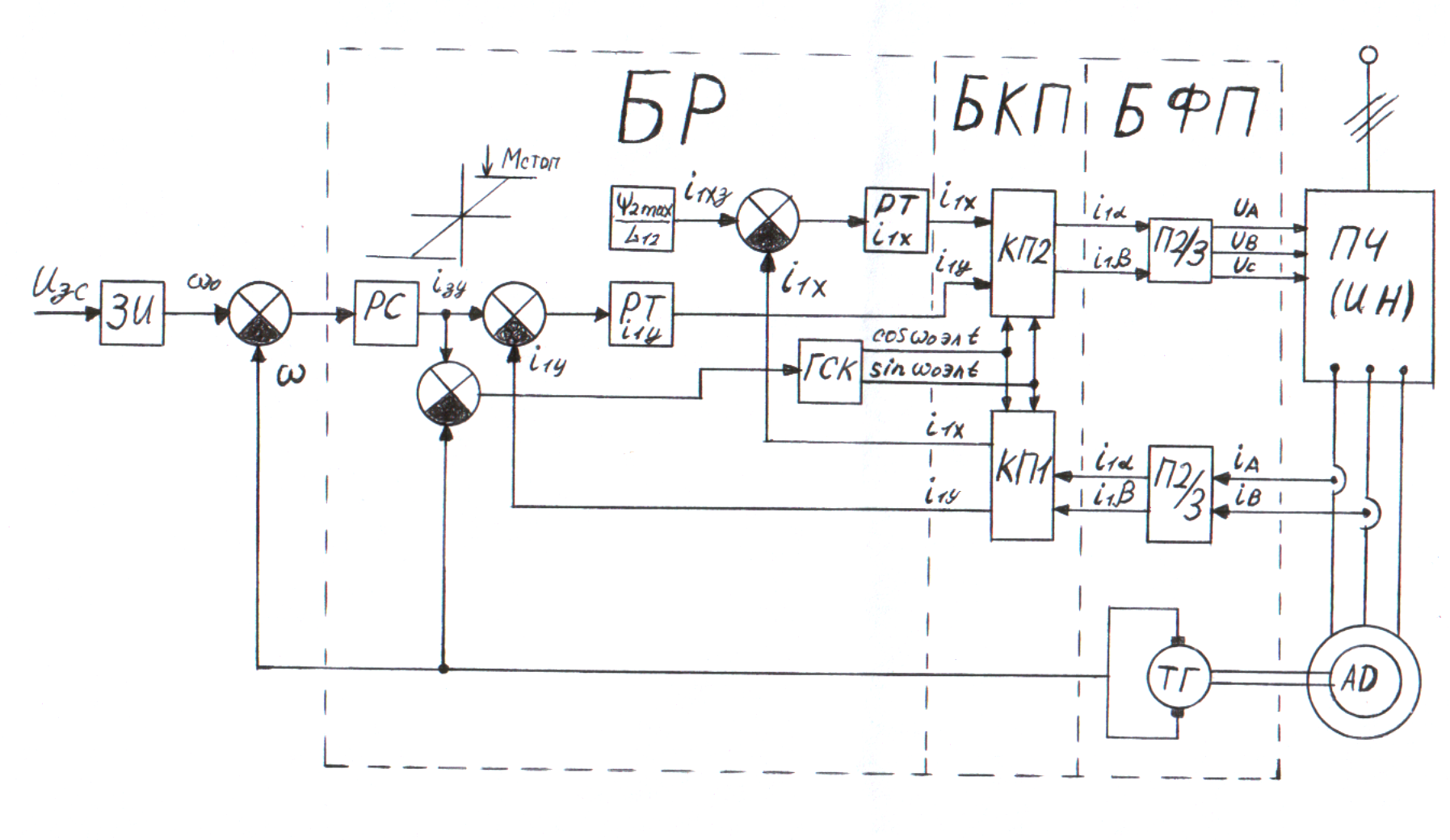
БФП- блок фазного преобразования. Осуществляет переход от параметров 3-х фаз к 2-х фазной машине в П 3/2 связанными с осями a,b. А в преобразователях П 2/3 переход от параметров 2-х фаз к 3-х фазной машине.
В координатных преобразованиях осуществляется переход от реальных переменных a,b(КП1) к переменным величинам связанными с осямиx,y.
В КП2- блок координатных преобразований (БКП), происходит переход от переменных связанных с осями x,yкa,b2-х фазной машины. Поскольку здесь осуществляется точное поддержание
i1xиi1yобеспечивается. А использование Ртi1x, Ртi1yРС позволяют получить астатическое регулирование.
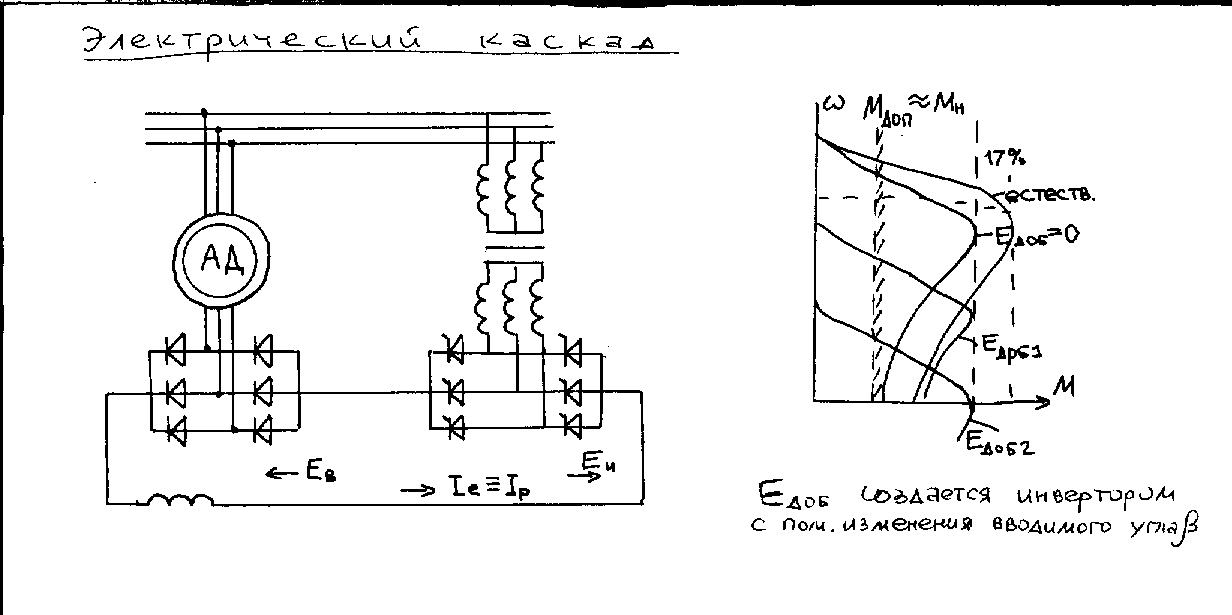
17. Регулирование скорости ад в каскадных схемах. Электрический каскад.
Осуществл. за счет введения в рот. цепь АД добавочной ЭДС которая может ииметь перемен. Величинуну и фазу. Величина добавочной ЭДС определ. уровнем скор. вращ. АД, а фаза позволяет регул коэф. мощн. При этом энерг. скольжения в зависимости от вида каскада (эл. или эл. мех ) из роторн. цепи перед обратно в питающую сеть (эл. каскад) или на вал двигателя (эл. мех каскад)

![]()
Изменяя величинуну доб. ЭДС мы мож. регул скорость дв-ля (↑ЕДОБ→↑ωДВ) Регул фазы позв регул коэф мощн. Введен ЕДОБ под опред. углом позволяет по мимо скорости так же и регулировать и коэф мощн. привода.
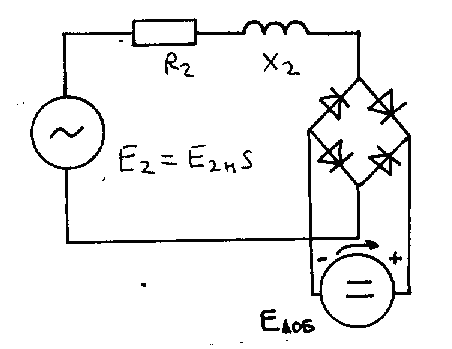
Основн недостатокв поддержании вводимой в рот цепь ЭДС с частотой равной частотеUротора поэтому наиб. распр. схемы введения ЕДОБв выпрямлен. цепь ротора.
В схемах
выпрямления при введении ЕДОБток рот. цепи всегда отстаёт по фазе от
Е2 пропорц ½ угла коммутации
вентилей и зависит от величины нагрузки
![]() .
Ток будет всегда отстающим а
регулировать коэф. мощн. не представляется.
возможным. Принцип регул скорости: Пусть
противоЭДС =0 роторная цепь замкн.
накоротко и двиг. раб на естественной
хар-ке. При введении ЕДОБстан
ЕДОБ> Е2 т.к. ЕДОБстала > Е2выпрямит. мост запирается
иI=0 в рот цепи, Е2РОТ=0
=> МДВ=0 =>ωАД↓скольжSувелич => ЭДС рот цепи
выпремленUРОТ>
добавочной противоЭДС в рот. цепи
начинает протек ток и двигатель будет
работать на новой механической
характеристике с новым меньшим значением
скорости.
.
Ток будет всегда отстающим а
регулировать коэф. мощн. не представляется.
возможным. Принцип регул скорости: Пусть
противоЭДС =0 роторная цепь замкн.
накоротко и двиг. раб на естественной
хар-ке. При введении ЕДОБстан
ЕДОБ> Е2 т.к. ЕДОБстала > Е2выпрямит. мост запирается
иI=0 в рот цепи, Е2РОТ=0
=> МДВ=0 =>ωАД↓скольжSувелич => ЭДС рот цепи
выпремленUРОТ>
добавочной противоЭДС в рот. цепи
начинает протек ток и двигатель будет
работать на новой механической
характеристике с новым меньшим значением
скорости.