

4. Влияние параметров Uя, Rя, f на вид механических и электромеханических характеристик дпт
5. Двухзонное регулирование скорости двигателя постоянного тока последовательного возбуждения
В первой зоне регулирование ведется за счет изменения Uя вниз от Uном.
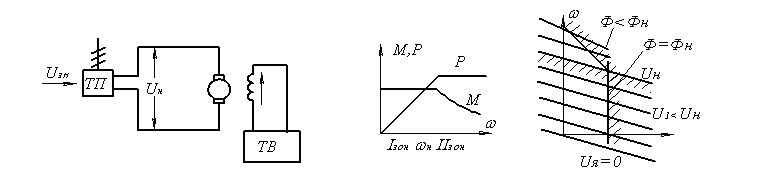
Р=↓Мω↑=const
↓Mдоп IIзона
![]()
![]()
![]()
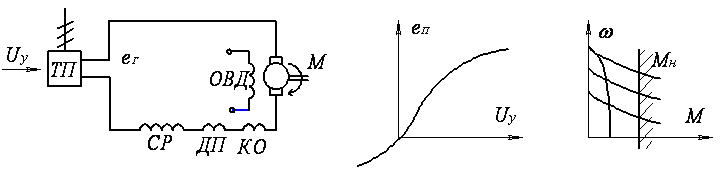
6. Система тп-д. Показатели регулирования
 D=10–диапазон
регулирования как в Г-Д.; плавность
высокая, можно плавно изменять угол
отпирания иUвых.
D=10–диапазон
регулирования как в Г-Д.; плавность
высокая, можно плавно изменять угол
отпирания иUвых.
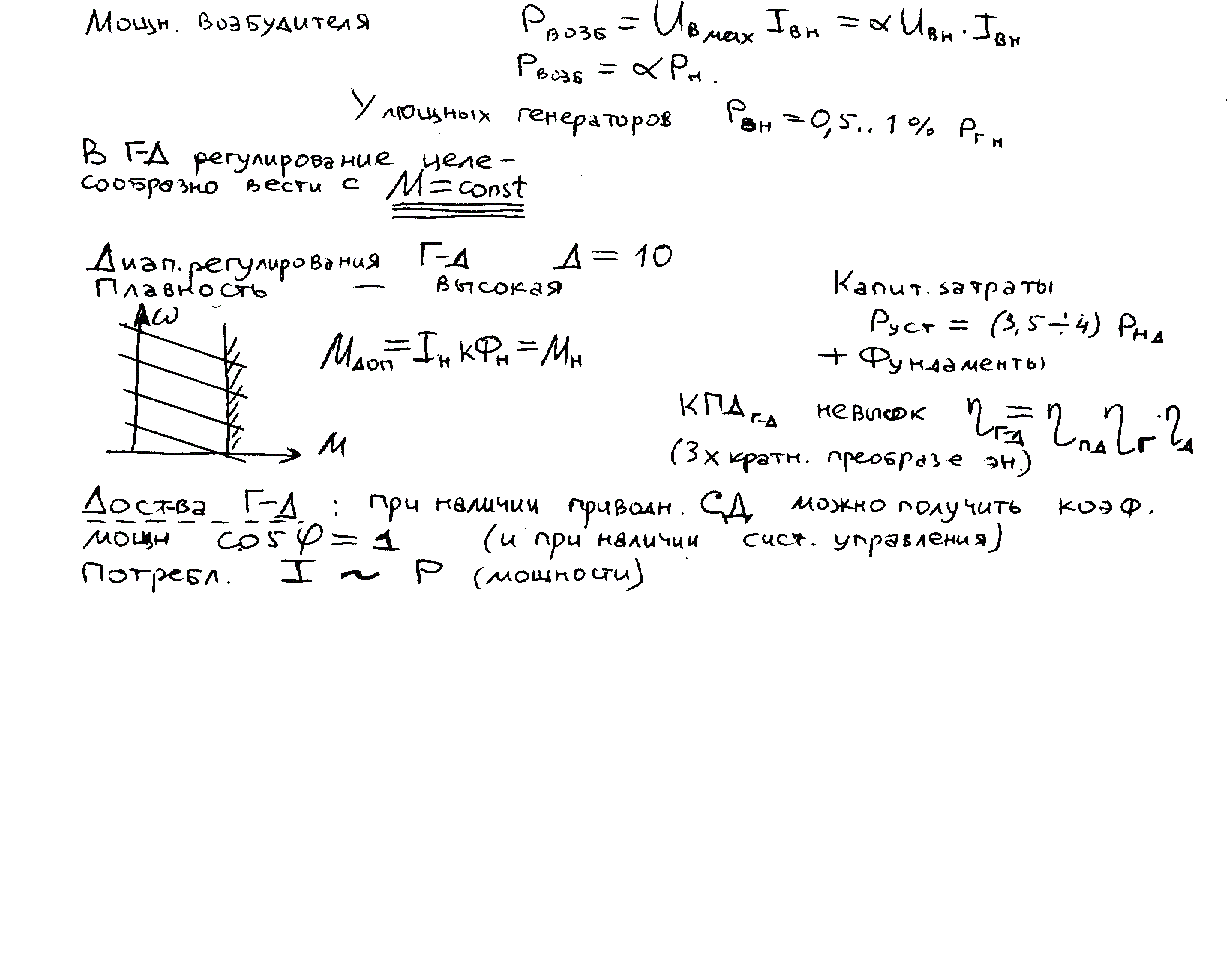
Регулирование целесообразно вести с Мн=Мдоп=const.
КПД- высокий. η=0,98 (мостовая); η=0,99 (нулевая).
Существенный недостаток – низкий коэффициент мощности (cosφ), что обусловлено самим принципом регулирования.
![]()
где
Ки– коэффициент искажения;
Кн – коэффициент несимметричности.
Искажается
форма напряжения 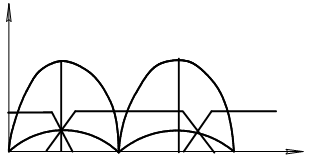
cosφ≈cosα;α-угол регулирования
Для уменьшения эффекта коммутации установлен фильтр компенсирующего устройства (ФКУ).
D=10 в разомкнутой системе ТП-Д, плавн-выс.
Достоинства высокое быстродействие Ттп=0,01 с.
Полоса пропускания (50-70)Гц, вентильного двигателя -100 Гц.
Обеспечение регулирования скорости за счет напр. на якоре.
7.Система шип-д. Показатели регулирования
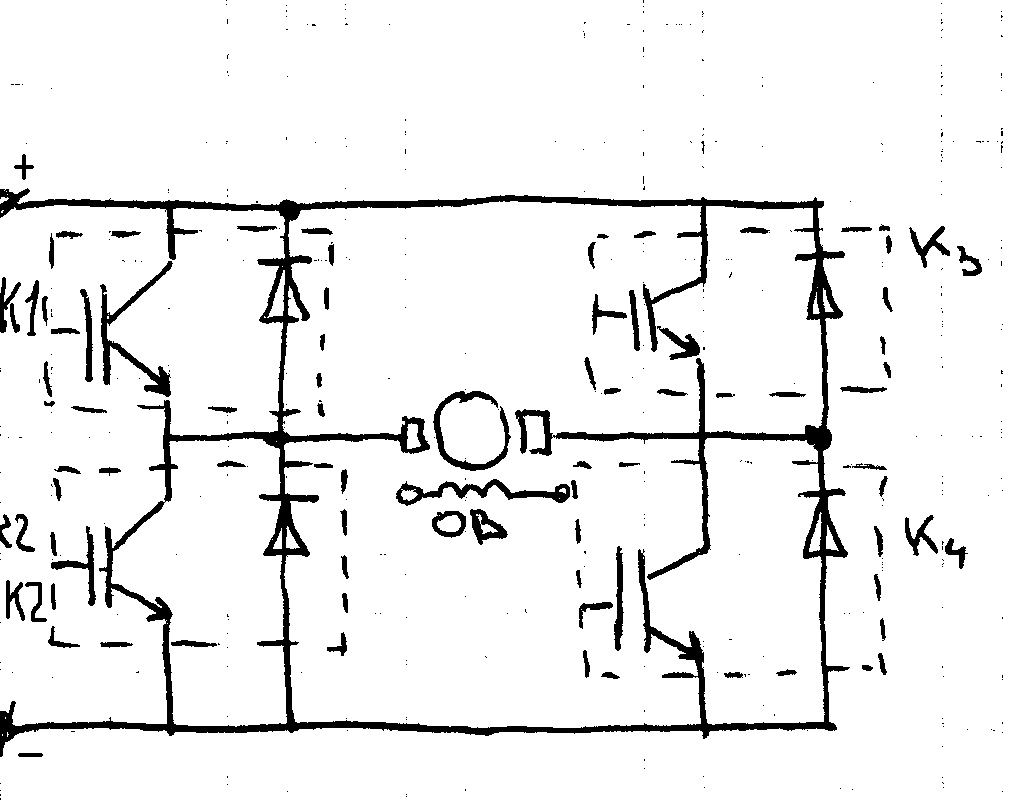
Обратные диоды необходимы для протекания тока в момент выключения ключей К1; К4 или К2; К3
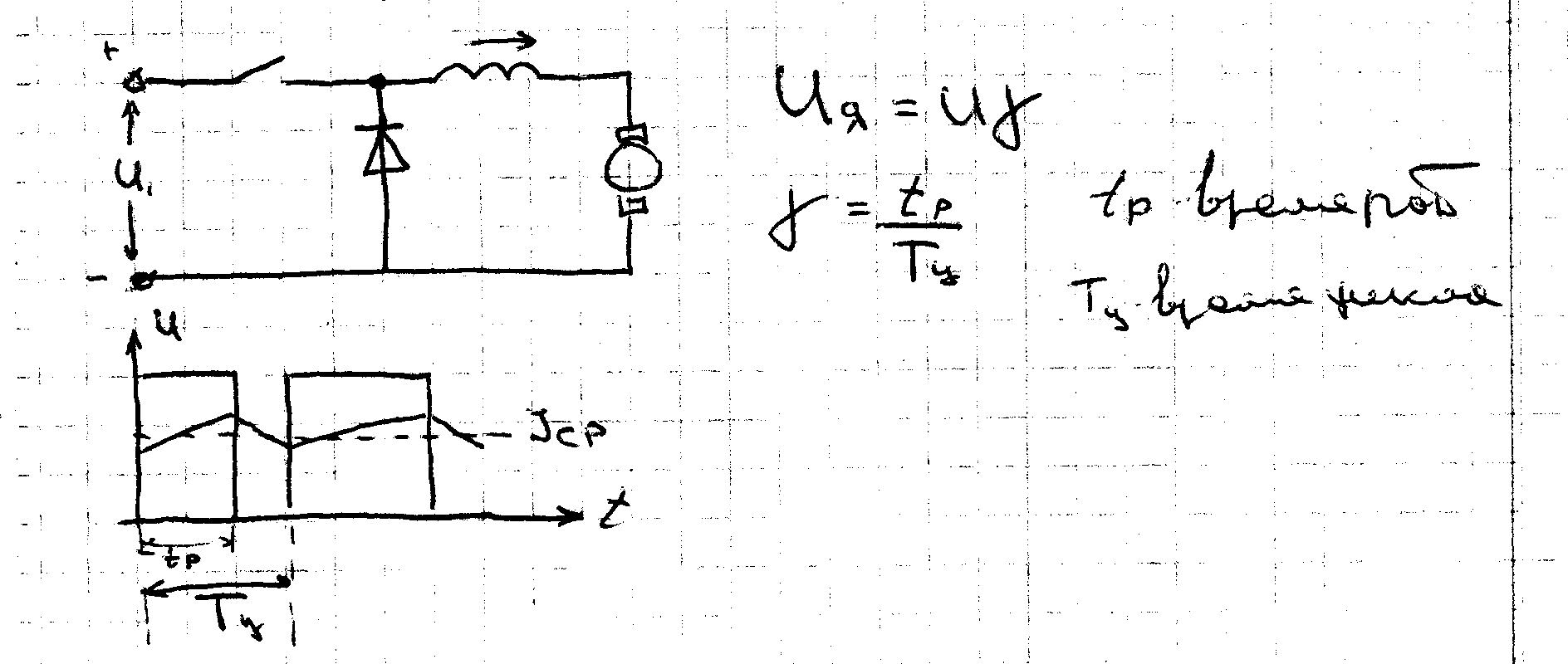
tР – время работы;
Тц – время цикла.
Dпорядка 10
Высокая плавность регулирования с постоянством момента.
КПД высокий.
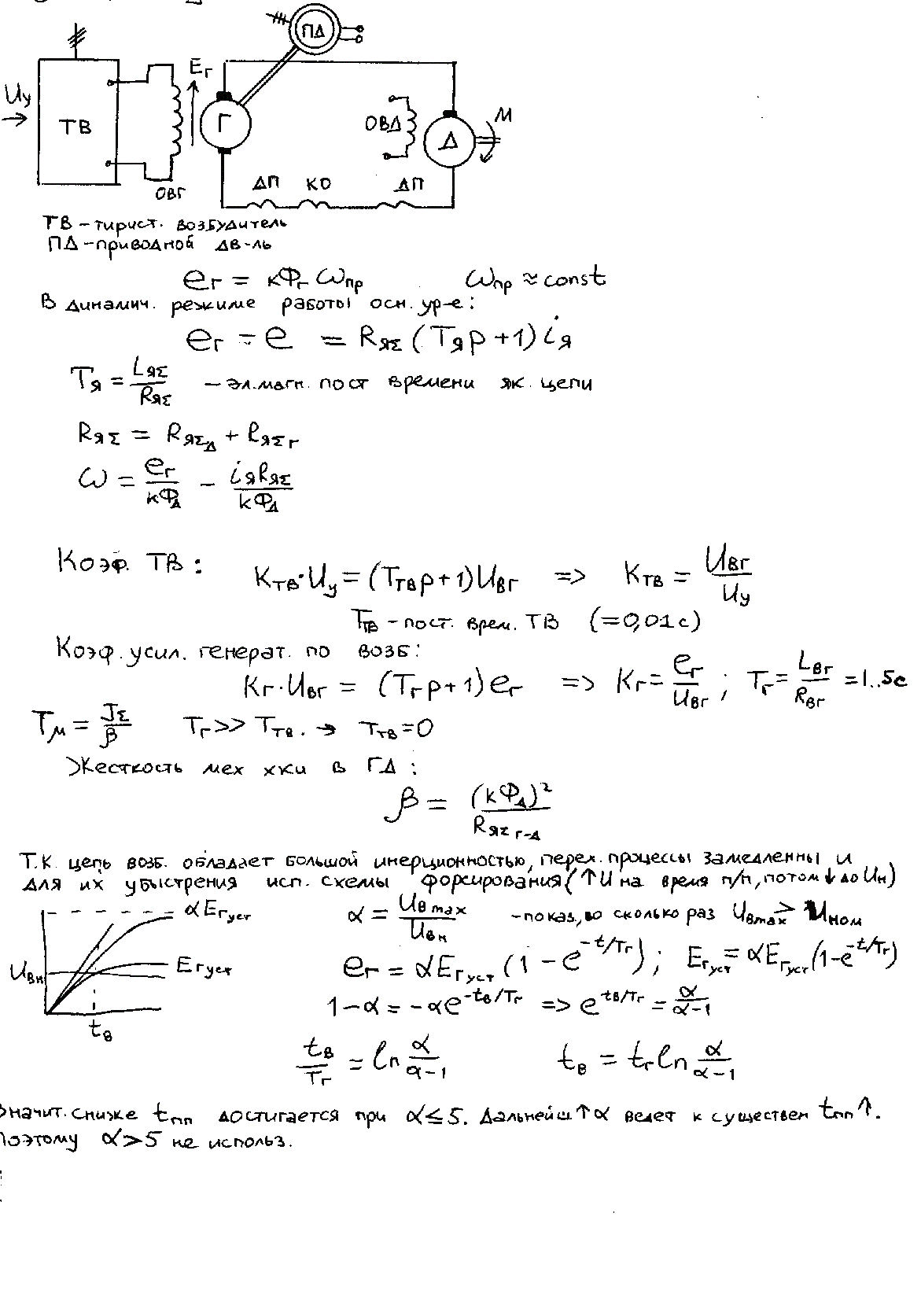
8.Система г-д. Показатели регулирования
9.Последовательная коррекция контура регулирования скорости с внутренним контуром регулирования м в системе уп-д
Wрс
1/Ком
.
аmTp(Tp+1)+1
1/Tp
Uзс
Uзм
М










Uос
Мс
Кос


W зам
=
зам
=
Wраз с=
Wорс=
Wрс=![]()
U ЗМ
Н = МСТОКОМ
ЗМ
Н = МСТОКОМ
UЗМ - КОММ1=0
(UЗС - КОСω) КРС=КОТМ
![]() ;
;![]() ;
;![]()
Подставляем в выражение КОС - его значен.
![]() аС=аМ=2
Если ТМ <4 Тμ
то хар-ка будет более мягкой.
аС=аМ=2
Если ТМ <4 Тμ
то хар-ка будет более мягкой.
Вывод:
Регулятор скорости получ-ся пропорц потому что обеспеч статич регул скор-ти, с ростом момента величина скор уменьш-ся:
Жестокость
мех. хар-ки зависит от соотношения пост.
времени ТМ и Тμ
![]() у двигателя с жесткой мех. хар-кой в
замкнутой сист м.б. меншей жестк ест мех
хар-ки. Для повышения жесткости следует
применить 2х контурную систему с ПИ-регул
скор., или дополнительно вводить второй
контур регул скорости
у двигателя с жесткой мех. хар-кой в
замкнутой сист м.б. меншей жестк ест мех
хар-ки. Для повышения жесткости следует
применить 2х контурную систему с ПИ-регул
скор., или дополнительно вводить второй
контур регул скорости
10.Регулирование положения. Параболический рег-р положения.
В трёх контурных системах (момент, скорость,
положение) регулирование осуществляется
через оптимизацию контура положения.
трёх контурных системах (момент, скорость,
положение) регулирование осуществляется
через оптимизацию контура положения.
Р егулятор
положения пропорциональный, коэф.
усиления. РП определяет задаваемое на
вход РС максимальное ускорение. Величина
ускорения зависит от величины начальной
скорости, чем больше скорость, тем больше
ускорение а, следовательно начальная
скорость. Это приводит к размягчению
системы по положению и начинает работать
контур регулирования положения, поэтому
в системе накапливается ошибка, которая
отрабатывается с перерегулированием,
что в контуре регулирования положения
не доступно. Поэтому для исключения
перерегулирования коэффициент усиления
регулируется положением, при отрабатывании
больших перемещений и большой начальной
скорости необходимо уменьшать коэффициент
усиления, это приводит к затягиванию
переходных процессов при отработке
перемещения, что снижает быстродействие
привода и производительность, поэтому
переходят к парабал. регулированию
положения, с переменным коэффициентом
усиления при отрабатывании больших
перемещений – маленький, а малых –
большой, поэтому при таком регулировании
обеспечивается одинаковое быстродействие,
как при отрабатывании больших, так и
малых перемещений.
егулятор
положения пропорциональный, коэф.
усиления. РП определяет задаваемое на
вход РС максимальное ускорение. Величина
ускорения зависит от величины начальной
скорости, чем больше скорость, тем больше
ускорение а, следовательно начальная
скорость. Это приводит к размягчению
системы по положению и начинает работать
контур регулирования положения, поэтому
в системе накапливается ошибка, которая
отрабатывается с перерегулированием,
что в контуре регулирования положения
не доступно. Поэтому для исключения
перерегулирования коэффициент усиления
регулируется положением, при отрабатывании
больших перемещений и большой начальной
скорости необходимо уменьшать коэффициент
усиления, это приводит к затягиванию
переходных процессов при отработке
перемещения, что снижает быстродействие
привода и производительность, поэтому
переходят к парабал. регулированию
положения, с переменным коэффициентом
усиления при отрабатывании больших
перемещений – маленький, а малых –
большой, поэтому при таком регулировании
обеспечивается одинаковое быстродействие,
как при отрабатывании больших, так и
малых перемещений.