

11. Влияние u1, x1, r1, x2 на вид механических характеристик ад
1 .
Введение добавочных активных, реактивных
сопротивлений в статорную цепь и
индуктивных сопр. в роторную цепь
асинхронного двигателяне позволяет
регулировать скорость. Такой метод в
основном применяется для ограничения
бросков пусковых токов маломощных
цепях.
.
Введение добавочных активных, реактивных
сопротивлений в статорную цепь и
индуктивных сопр. в роторную цепь
асинхронного двигателяне позволяет
регулировать скорость. Такой метод в
основном применяется для ограничения
бросков пусковых токов маломощных
цепях.
2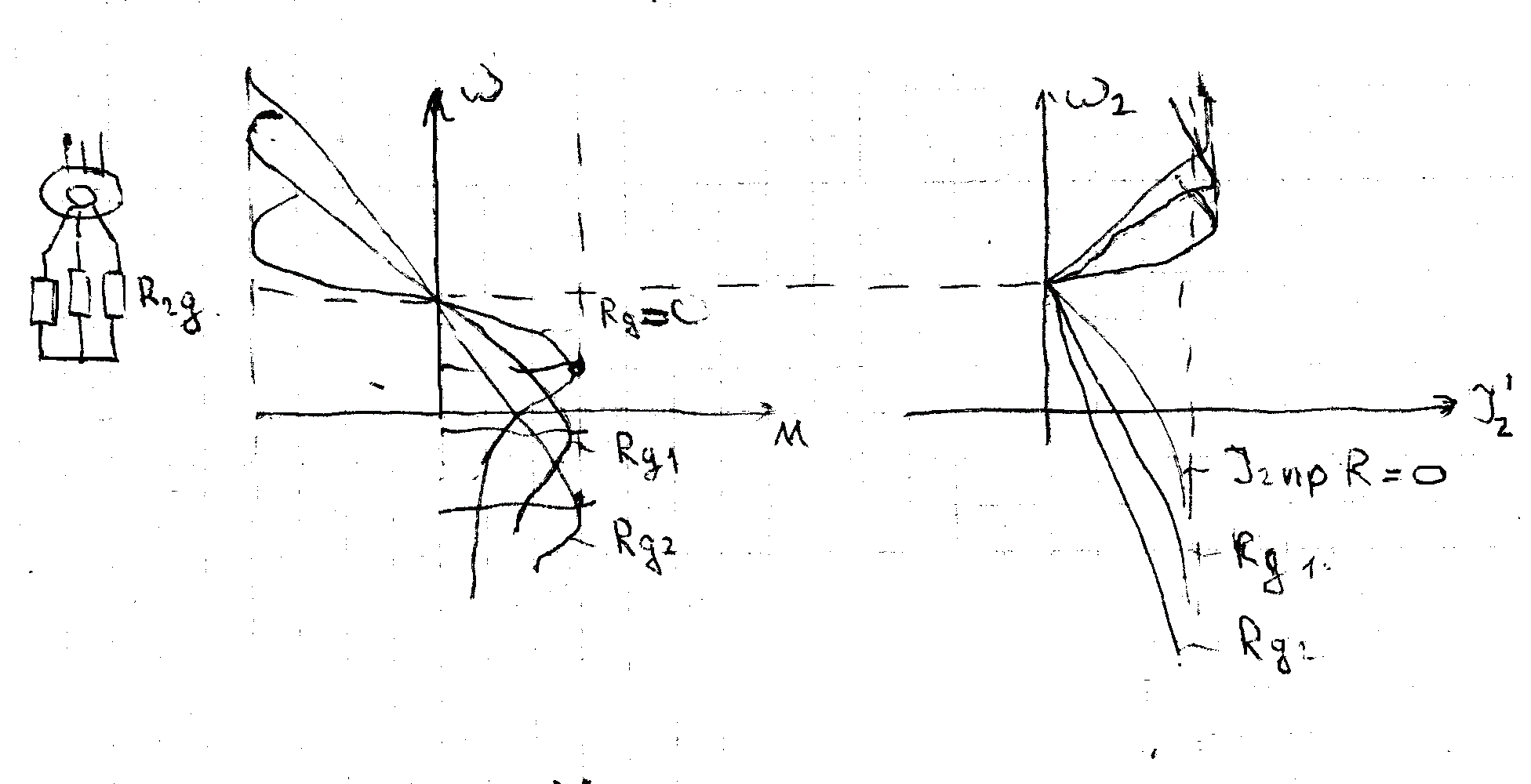 .
Введение активных сопротивлений в цепь
ротора.
.
Введение активных сопротивлений в цепь
ротора.
Регулирование скорости ступенчатое,
D=2,
КПД М/ М0
3. Изменение u, приложенного к статору ад.
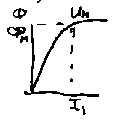
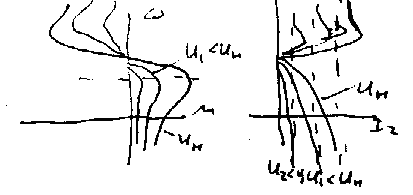 АД очень чувствителен к напряжению, от
него зависит не только ток ротора, но и
магнитный поток Ф.
АД очень чувствителен к напряжению, от
него зависит не только ток ротора, но и
магнитный поток Ф.
Повышение напряжения ведёт к насыщению магнитной цепи машины, вследствии чего потребл. Мощность двигателя многократно увеличивается.
Увеличение Uна статоре АД сверх допустимого не допустимо.
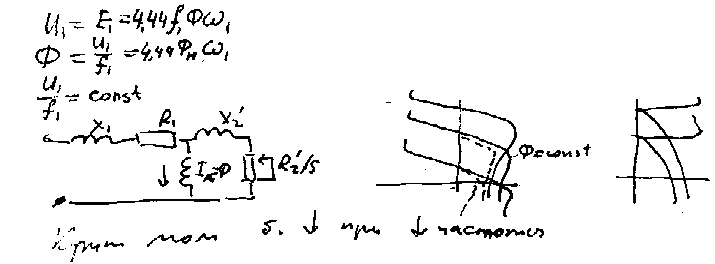
4. Изменение частоты питающей сети
При изменении частоты питающей сети одновременно необходимо регулировать U, приложенное к двигателю. ИзменениеUтредуется из условия стабилизации магнитного потока двигателя.
12.Электромеханические свойства ад

 f1– частота питания сети, рn– число пар полюсов
f1– частота питания сети, рn– число пар полюсов
П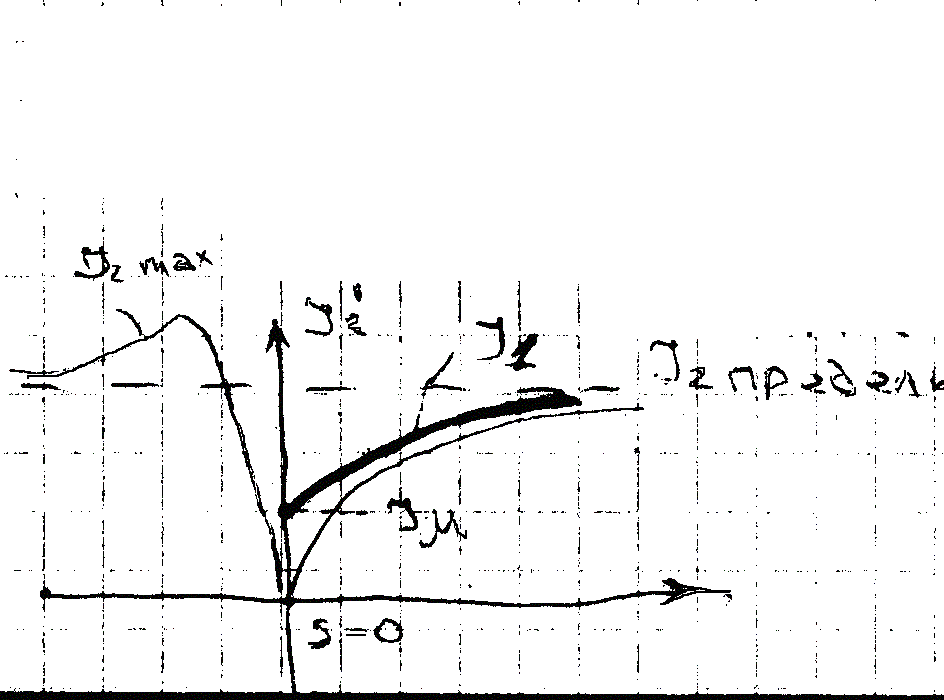 ри
переходе в генераторный режим работы,
скольжение отрицательное -S
ри
переходе в генераторный режим работы,
скольжение отрицательное -S![]()
![]()
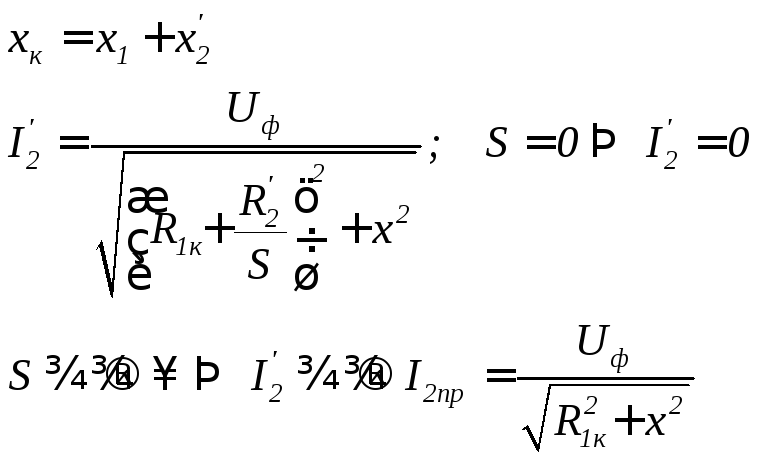
При изменении скольжения от 0 до и от -до 0 выявляетсяmaxмомент, коорый получил название критического момента Мк, который имеет место при критическом скольженииSк
 ,
поэтому мех. хар-ка зависимости М от
скорости имеет вид:
,
поэтому мех. хар-ка зависимости М от
скорости имеет вид:

При изменении Sизменяется частота тока в роторе, а следоват. иx2 иcos
13. Система скалярного управления ад
Система скалярного управления имеет наиболее простую схему.

Отличие от системы полярного управления сосотоит в том, что в системе скалярного уаправления не регулируется фаза тока.
Недостаток данной системы в том, что она имеет большую инерционность, поскольку в переходных процессах не обеспечивается поддержка потокосцепления.
Сигнал пропорционален абсциссе скольжения полученной с выхода регулятора скорости Uрс=wо-w, задаётся с помощью функции преобразования (ФП1) амплитуды тока на выходе генератора синусоидальных колебаний (ГСК). Выходная частота ГСК пропорциональна скорости идеального х.х., задаётся с выхода преобразователя частоты (ПНЧ).
В системе скалярного управления регулирование фазы тока с помощью ФП2 отсутствует.
ФП2 имеет место в системе полярного управления.
Поэтому отсутствие регулирования функции тока в системах ведёт к проявлению электромагнитной инерции обусловленной индуктивностью контура намагничивания.
Сигналы с ГСК подают на входы регуляторов тока РТ1, РТ2, РТ3, которые поддерживают выходной ток на заданном уровне с помощью контроля тока в фазах двигателя при помощи датчиков тока ДТ1, ДТ2, ДТ3.
14 Система трн-ад. Показатели регулирования.
В настоящее время для регулирования напряжения на выводах статора АД наибольшее распространение получил тиристорный регулятор напряжения (ТРН).

Рис. 1
На Рис. 1 приведена схема управления АД с помощью ТРН, состоящая из 3-х пар встречно-паралельно соединённых теристоров, каждая из которых включена между фазой сети и фазой статора АД.
Тиристоры получают импульсы управления Uот СИФУ, которая обеспечивает их сдвиг на угол управления. Изменяя угол управленияот нуля до, можно регулировать напряжения на нагрузке от полного напряжения сети до нуля.
Управляющие импульсы подаются со сдвигом во времени на третью часть периода частоты сети, а фазные напряжения сети сдвинуты относительно друг друга на 120о.

Рис. 2
Из графика (Рис. 2) следует, что с увеличением угла управленияснижается критический момент АД и падает жесткость его механических характеристик. Вследствие этого при возможных колебаниях момента сопротивления механизма Мсскорость его движения может резко изменится, что в большинстве случаев недопустимо. Из чего следует, что необходимо регулировать уголв зависимости от изменения момента Мснагрузки.
Регулирование скорости АД в этой системе плавное и производится только вниз от естественной характеристики.
Диапазон регулирования скорости при использовании обратных связей, например по скорости, достигает десяти. При использовании обр. связей могут быть получены жесткие характеристики.
Основными достоинствами ТРН-АД являются относительная простота, надежность, легкость автоматизации, удобство управления.
ТРН-АД имеет существенный недостаток, заключающийся в больших потерях в обмотке ротора при работе на низких скоростях и, следовательно, больших скольжениях, что уменьшает КПД эп.