

Основные определения и задачи статики
.pdf1.Состав машины: узел, механизм, звено, кинематическая пара, кинематическая цепь.
Узел - это законченная сборочная единица, состоящая из ряда деталей имеющих общее функциональное назначение. (подшипник, муфта и т.д.)
Механизм - кинематическая цепь, в состав которой входит неподвижное звено (стойка) и число степеней свободы которой равно числу обобщенных координат, характеризующих положение цепи относительно стойки.
Механизмом называется система твердых тел, предназначенная для передачи и преобразования заданного движения одного или нескольких тел в требуемые движения других твердых тел
Звено - твердое тело или система жестко связанных тел, входящих в состав механизма. Кинематическая цепь - система звеньев, образующих между собой кинематические пары. Кинематическая пара - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
2.Структура механизмов. Основные понятия.
Сцелью разработки общих методов проектирования и расчета механизмы классифицируют по разным принципам: характеру движения – плоские и пространственные; виду кинематических пар – механизмы с высшими и низшими парами; назначению; принципу передачи усилий – механизмы передачи движения за счет сил трения или зацепления; по конструктивным признакам – шарнирно-рычажные, кулачковые, фрикционные, зубчатые, червячные, механизмы с гибкой связью и др.
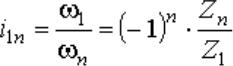
Рычажными называют механизмы с геометрическим замыканием звеньев, которые не содержат кинематических пар четвертого класса (рис. 1.3). Они могут передавать большие усилия и мощности по сравнению с другими механизмами в аналогичных условиях. Такие механизмы применяют в основном для преобразования вращательных или поступательных движений входных звеньев в качательное или возвратно-поступательное движение выходных звеньях.
В зависимости от характера движения и назначения звенья имеют определенные названия. Звено, совершающее полный оборот вокруг неподвижной оси – кривошип; плоскопараллельное движение имеет шатун; качательное – коромысло; поступательное – ползун; направляющая – неподвижное звено, образующее поступательную пару с ползуном; коромысло, служащее направляющей для ползуна
(кулисного камня) – кулиса и др.
Кулачковые механизмы (рис. 1.4, а, б и в) – механизмы с высшими кинематическими парами, которые образуются путем силового и геометрического замыкания его звеньев: кулачка и толкателя; кулачка и коромысла. Эти механизмы используются для преобразования вращательного движения входного звена в возвратно-поступательное или качательное движение выходного с остановками заданной продолжительности.
Фрикционные механизмы (рис. 1.4, г) служат для передачи движения за счет сил трения, возникающих в результате контакта звеньев. Фрикционный механизм может быть выполнен с гибкими звеньями. Его применяют для передачи вращения между валами при больших межосевых расстояниях при помощи гибкой связи: ремня.Зубчатые механизмы (рис. 1.4, д и е) образованы с помощью зубчатых колес – дисков, с нарезанными на ободе зубьями. Передача нагрузки между колесами осуществляется за счет силового воздействия зубьев друг на друга – силового замыкания. Их конструкция позволяет передать движение между параллельными, пересекающимися и перекрещивающимися осями с постоянным или переменным отношением угловых скоростей. Меньшее из зубчатых колес называют шестерней.
3.Классификация кинематических пар.
Кинематические пары принято делить по числу уравнений связей на классы от 5-го до 1-го. Иногда их различают по числу степеней свободы на одно-, двух-, трех-, четырех-, и пяти-подвижные. Подвижность и класс каждой пары в сумме равны 6, т.е. числу степеней свободы свободного твердого тела. Таким образом класс и подвижность по разному характеризуют одно и то же свойство.
Кинематические пары по характеру движения делятся на плоские и пространственные. В плоских парах относительное движение происходит в плоскости (вращательная, поступательная).
По форме элементов (см. выше) кинематические пары делятся на низшие и высшие. В низших парах элементами служат поверхности: плоскости, цилиндрические и сферические поверхности. В высших парах элементами являются точки и линии. Достоинство низших пар – повышенная долговечность соединения благодаря небольшим удельным нагрузкам на поверхность. В высших парах соприкосновение звеньев происходит на небольших площадках, что ведет к их ускоренному износу. Посредством низших пар можно осуществлять относительно простые движения, высшие пары представляют в этом отношении большие возможности.
4.Кинематическая цепь.
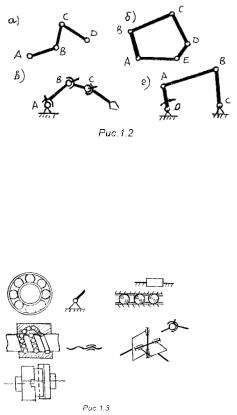
Кинематическая цепь - это система звеньев, образующих между собой кинематические пары. В зависимости от того, какие кинематические пары присутствуют в цепи и как они расположены, различают плоские и пространственные кинематические цепи. В плоской кинематической цепи все звенья движутся в одной или параллельных плоскостях (рис.1.2а.). Кинематическая цепь, звенья которой образуют замкнутый контур, называется замкнутой (рис.1.2б), если контур не замкнут, цепь называется незамкнутой или открытой (рис.1.2в). В традиционных механизмах обычно используются замкнутые кинематические цепи, незамкнутые цепи находят применение только в манипуляторах. Механизм – это кинематическая цепь, в которой указаны стойка, входные и выходные звенья.
На основе кинематических цепей можно получать не только механизмы, но и устройства, заменяющие некоторые кинематические пары, так называемые кинематические соединения (рис.1.3). Шарикоили роликоподшипник эквивалентен вращательной паре. Роликовые направляющие заменяют поступательную пару. Винтовая пара качения заменяет обычную винтовую пару. Карданный шарнир, он же называется шарниром Гука или универсальным шарниром, заменяет сферическую пару с пальцем. Если вилку снабдить еще одной вращательной парой получим аналог сферической пары. Крестовое соединение допускает два поступательных движения без вращения.

5.Число степеней свободы механизма. Подвижность механизма
Кинематическая цепь составляет основу каждого механизма. Важнейшей характеристикой кинематической цепи является число степеней свободы. В теоретической механике под числом степеней свободы понимается число обобщенных координат, т.е. независимых между собой параметров, определяющих положение системы в выбранном пространстве. Обобщенными координатами механизма называются независимые между собой координаты, заданием которых определяется положение всех звеньев относительно стойки. Число обобщенных координат механизма равно его числу степеней свободы или по другой терминологии – степени подвижности механизма.
Пусть кинематическая цепь содержит n звеньев. До того как они были соединены посредством кинематических пар, система из n звеньев имела 6n координат. Каждая кинематическая пара класса m дает m уравнений связей относительно координат. Разность между числом координат и числом уравнений связей дает число независимых координат:
H= 6k – 5p5 – 4p4 – 3p3 – 2p2 – p1 |
(1.1) |
Здесь H – число степеней свободы механизма,
n – число подвижных звеньев,
p1 – число пар 5-го класса (одноподвижных),
Эта формула известна как формула Сомова-Малышева. Для плоского механизма аналогичные рассуждения приводят к формуле Чебышева:
W = 3n – 2p1 – p2 |
(1.2) |
на рисунке 1.4 представлены примеры кинематических цепей с различными степенями подвижности.
Звенья, которым приписываются обобщенные координаты, называются начальными. Обычно они совпадают с входными звеньями, однако есть случаи, когда за начальное звено принимают выходное или даже промежуточное – это упрощает исследование механизма. Число степенй свободы механизма определяет число начальных звеньев. Чаще всего применяют механизмы с W = 1.
Подвижность механизма - число независимых обобщенных координат однозначно определяющих положение звеньев механизма в пространстве. Определяется по формуле СомоваМалышева.
W= 6n - 5p1 - 4p4 - 3p3 - 2p2 – p1
А для плоского по формуле Чебышева
W= 3n - 2p5 -p4, где n- число подвижных звеньев.
6.Структурный синтез и анализ механизма.
Структурным синтезом механизма называется проектирование структурной схемы механизма, которая состоит из неподвижного и подвижных звеньев и кинематических пар. Он является начальной стадией составления схемы механизма, удовлетворяющего заданным условиям. Исходными данными обычно являются виды движения ведущего и рабочего звеньев механизма, взаимное расположение осей вращения и направления поступательного движения звеньев, их угловые и линейные перемещения, скорости и ускорения. Наиболее удобным методом нахождения структурной схемы является метод присоединения структурных групп Ассура к ведущему звену или основному механизму.
Под структурным анализом механизма понимается определение количества звеньев и кинематических пар, определение степени подвижности механизма, а также установление класса и порядка механизма.
Степень подвижности плоского механизма определяется по формуле Чебышева:
W = 3n – 2Pn=0
где Рn=3/2*n – число низших пар, W – число степеней свободы, n- число подвижных звеньев.
Класс структурной группы в общем случае определяется числом кинематических пар в замкнутом контуре, образованном внутренними кинематическими парами. Он определяется внешним классом структурной группы, входящей в его состав.
7.Конструктивнофункциональная классификация механизмов.
Согласно этой классификации механизмы можно разделить на пять основных видов: рычажные, кулачковые, фрикционные, зубчатые механизмы и механизмы с гибкими звеньями.
К рычажным механизмам относятся механизмы, звенья которых образуют только вращательные, поступательные, цилиндрические и сферические пары. На рис. II показаны схемы наиболее распространенных плоских рычажных механизмов – кривошипно-ползунного (рис.1.5 а), шарнирного четырехзвенника (рис.1.5 б), кулисного (рис.1.5 в).
Кривошип – вращающееся звено, которое может совершать полный оборот вокруг неподвижной оси (звено I на всех трех схемах). Шатун – звено, которое образует кинематические пары только с подвижными звеньями (звено 2 на рис.1.5). Ползун – звено, образующее поступательную пару со стойкой (звено 3 на рис.1.5). Коромысло – вращающееся звено, которое может совершать только неполный оборот вокруг неподвижной оси (звено 3 на рис.1.5). Кулиса – звено, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару (звено 3 на рис. 1.5).
К кулачковым механизмам относятся механизмы, в состав которых входит кулачок, а кулачком называется звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны. Кулачковые механизмы (рис.1.6) предназначены для преобразования вращательного или возвратно-поступа- тельного движения входного эвена, которым, как правило, является кулачок I, в возвратно-поступательное или возвратно-вращательное движение выходного звена-толкателя 2.
Основное достоинство кулачковых механизмов заключается в возможности получения практически любого закона движения толкателя за счет соответствующего выбора профиля кулачка.
Во фрикционных механизмах движение от входного звена к выходному передается за счет сил трения, возникающих в местах контакта звеньев (высшая пара).
К зубчатым механизмам относятся механизмы, в состав которых входят зубчатые звенья. Механизмы с гибкими связями применяют для передачи вращательного движения между валами при больших межосевых расстояниях
8.Передаточное отношение.
Передаточное отношение, одна из основных характеристик механизмов, в том числе передач вращательного движения, определяемая как отношение угловых скоростей или частот вращения звеньев. Обычно имеется в виду отношение угловой скорости ведущего звена передачи к угловой скорости ведомого звена . Понятие Передаточное отношение распространяется на простые механизмы (пары зубчатых колѐс, червячные, ремѐнные и др. передачи) и на сложные многозвенные (многоступенчатые редукторы, планетарные редукторы, коробки передач и т.д.). Передаточное отношение ряда последовательно соединѐнных передач равно произведению Передаточное отношение этих передач.
Наряду с Передаточное отношение широко используется (особенно для передач зацеплением) понятие передаточное число.
Механизмы с передаточным отношением больше единицы — редукторы (понижающие редукторы), меньше единицы — мультипликаторы (повышающие редукторы).
|
= |
1 |
|
= |
2 |
= |
1 |
|
|||
|
|
|
|
||||||||
1,2 |
|
2 |
2,1 |
|
1 |
|
1,2 |
||||
|
|
|
|
|
|
||||||
«+» ставится, если направление угловых скоростей одинаково |
|||||||||||
|
= |
1 |
= ± |
2 |
= ± |
2 |
, где r – радиус, а z – число звеньев зубчатых колѐс |
||||
|
|
|
|||||||||
1,2 |
|
2 |
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
9.Общие сведения о передачах.
Передача – это устройство для передачи энергии механического движения на расстояние и преобразования его параметров.
По принципу работы:
1.Передачи с непосредственными сопротивлениями звеньев(червячные, шарнирно-рычажные и др.)
2.Передача с гибкой связью
В абсолютном большинстве случаев режим работы рабочей машины не совпадает с режимом работы двигателя, поэтому передача механической энергии от двигателя к рабочему органу машины осуществляется с помощью различных передач.
-требуемые скорости рабочих органов машины часто не совпадают со скоростями стандартных двигателей;
-скорости рабочего органа машины часто необходимо регулировать (изменять) в процессе работы;
-большинство рабочих органов машин должны работать при малых скоростях и обеспечивать большие вращающие моменты, а высокооборотные двигатели экономичнее;
-двигатели изготовляют для равномерного вращательного движения, а в машинах иногда требуется прерывистое поступательное движение с изменяющимися скоростями.
Классификация механических передач
-по принципу передачи движения: передачи трением и передачи зацеплением; внутри каждой группы существуют передачи непосредственным контактом и передачи гибкой связью;
-по взаимному расположению валов: передачи с параллельными валами (цилиндрические, передачи с пересекающимися осями валов (конические), передачи со скрещивающимися валами (червячные, цилиндрические с винтовым зубом, гипоидные);
-по характеру передаточного числа: с постоянным передаточным числом и с бесступенчатым изменением передаточного числа (вариаторы).

3.Основные виды зубчатых передач.
Зубчатые передачи осуществляют передачу вращательного движения с одного вала на другой с помощью цилиндрических, конических, червячных колѐс, имеющих специально профилированные зубья, при этом зубчатые колѐса могут иметь прямые, косые, спиральные, шевронные зубья и др.
При использовании не прямозубых колѐс повышается плавность и бесшумность работы и увеличивается нагрузочная способность передачи.
Достоинства:
1.Высокая надежность работы в широком диапазоне скоростей
2.Малые габариты
3.Большая долговечность
4.Высокий КПД
5.Сравнительно малые нагрузки на валы и подшипники
6.Простота обслуживания
Недостатки:
1.Высокие требования к точности изготовления и монтажа
2.Высокий шум
В зависимости от расположения осей вращения колѐс бывают следующие виды:
1.С параллельными осями (цилиндрические-бывают с внешними и внутренними зацеплениями)
2.С пересекающимися осями (конические-бывают ортогональные, криволинейные, тангенсальные)
3.Со скрещивающимися осями
Взубчатых передачах с пересекающимися осями в качестве начальных поверхностей используются усечѐнные конусы, вершины которых пересекаются в одной точке (рис. а), а в передачах с перекрещивающимися осями теоретическими начальными поверхностями являются гиперболоиды вращения (рис. б). Такие передачи называются гиперболоидными.
Контакт зубьев 2-х колѐс в таких передачах происходит по прямолинейным образующим mn.
4.Кинематика зубчатых механизмов с неподвижными осями вращения.
Исследование рядовых зубчатых механизмов Рядовые зубчатые механизмы (передачи с промежуточными или паразитными колесами), представляют собой последовательное соединение нескольких пар зубчатых колес, на каждой из неподвижных осей которых помещено по одному колесу (рис. 6.2). Имея схему передачи и зная числа зубьев или радиусы полоидных окружностей колес, можно определить общее передаточное отношение редуктора аналитически или графически. Для механизма, состоящего из четырех последовательно соединенных цилиндрических колес внешнего зацепления (рис. 6.2), общее передаточное отношение:
В общем случае при n колесах в механизме:
Общее передаточное отношение рядового зубчатого механизма равно обратному отношению чисел зубьев или радиусов крайних колес. Знак передаточного отношения определяется множителем (-1)n, где n - число передач внешнего зацепления. При n четном i > 0, т.е. ведомое и ведущее звенья редуктора или мультипликатора вращаются в одном направлении; при нечетном n - в разных направлениях. Анализируя приведенные примеры устанавливаем, что число зубьев промежуточных колес 2 и 3, находящихся одновременно в зацеплении с двумя другими колесами, не влияет на величину общего передаточного отношения механизма. Но установка таких промежуточных колес позволяет изменять направление вращения ведомого звена. При четном числе промежуточных колес направление вращения ведущего и ведомого звеньев противоположны, при нечетном - одинаковы. Применяют эти колеса главным образом там, где необходимо изменить направление вращения ведомого вала при неизменном направлении вращения ведущего (механизм трензеля токарного станка, механизм заднего хода автомобильной коробки передач и др.), либо там, где необходимо обеспечить передачу движения при больших межосевых расстояниях (когда нельзя увеличивать размеры ведущих и ведомых колес из-за их больших габаритов).