

get_2 физика
.pdfТраекторией движения тела y(x), брошенного под углом к горизонту, является часть параболы.
Классический закон сложения скоростей: абсолютная ско-
рость тела равна векторной сумме относительной и переносной скоростей:
υ = υ1 + υ2 , |
(1.25) |
где υ – скорость тела относительно неподвижной системы координат (абсолютная скорость), υ1 – скорость тела относитель-
но подвижной системы координат (относительная скорость), υ2 – скорость подвижной системы координат относительно не-
подвижной (переносная скорость).
Угловой скоростью вращения твердого тела называется векторная величина, равная первой производной угла поворота тела по времени, умноженной на единичный вектор n :
r |
dϕ r |
|
|
ω = |
|
n , |
(1.26) |
dt |
|||
где dϕ – изменение угла поворота за время dt , n – вектор, лежа-
щий на оси вращения, направление которого определяется правилом правого винта (рис. 1.3).
Проекция |
вектора угловой |
||
скорости на ось вращения: |
|||
ω = |
dϕ |
. |
(1.27) |
|
|||
|
dt |
|
|
Период Т – время, за которое тело совершает один полный оборот, т. е. поворачивается на угол 2π . Число оборотов, совершаемых телом при равномерном
Рис. 1.3 вращении в единицу времени, называется частотой ν .
11

Связь периода с частотой выражается зависимостью: |
|
||
T = |
1 |
. |
(1.28) |
|
|||
|
ν |
|
|
Угловым ускорением вращения твердого тела называется векторная величина, равная первой производной вектора угловой скорости по времени:
r |
|
|
||
ε = |
dω |
, |
(1.29) |
|
dt |
||||
|
|
|
||
где dω – изменение вектора угловой скорости за время dt .
Проекция вектора углового ускорения на ось вращения:
ε = |
dω |
= |
d 2 ϕ |
. |
(1.30) |
|
dt |
dt 2 |
|||||
|
|
|
|
Уравнения равнопеременного вращательного движения твердого тела:
ϕ = ϕ0 |
+ ω0t + εt 2 2 , |
(1.31) |
||
ω = ω0 |
+ εt , |
(1.32) |
||
ϕ = |
ω2 |
− ω2 |
|
|
|
0 |
, |
(1.33) |
|
|
|
|||
где ω0 |
2ε |
|
||
и ω – проекции начальной угловой скорости и угловой |
||||
скорости в момент времени t на ось вращения, ϕ0 |
– начальный |
|||
угол поворота, ϕ – угол поворота в момент времени t .
Связь между линейными и угловыми величинами, характеризующими движение точки по окружности:
s = ϕr , |
(1.34) |
где s – длина дуги окружности, соответствующей углу поворота ϕ , выраженному в радианах; r – радиус окружности,
υ = ωr , υ = ω × r *, |
(1.35) |
* Здесь и далее символом “× ” обозначено векторное произведение векторов.
12
aτ = εr , aτ = ε × r , |
r |
(1.36) |
r |
(1.37) |
|
an = ω2 r , an = −ω2 r , |
||
где r – радиус-вектор движущейся точки, начало которого совпадает с центром окружности.
2. ДИНАМИКА ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
Динамика – раздел механики, в котором изучаются законы механического движения тел и причины, вызывающие или изменяющие это движение. Основу динамики составляют законы Ньютона.
Первый закон Ньютона: тело (материальная точка) сохраня-
ет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит его изменить это состояние.
Система отсчета, относительно которой тело при отсутствии действия со стороны других тел движется равномерно и прямолинейно, называется инерциальной.
Масса – скалярная физическая величина, являющаяся мерой инертности тела (инертная масса). С другой стороны, масса определяет также и гравитационные свойства (гравитационная масса). В настоящее время установлено, что инертная и гравитационная массы равны друг другу.
Сила – векторная физическая величина, являющаяся мерой воздействия со стороны других тел или полей на данное тело. В результате действия силы тело может приобретать ускорение, а также изменять свою форму и (или) размеры, т.е. деформироваться.
В каждый момент времени сила характеризуется скалярным значением, направлением и точкой приложения.
Единицей измерения силы в системе СИ является один Ньютон
(1 Н). 1 Н равен силе, которая телу массой 1 кг сообщает ускорение 1 м/с2.
13
Второй закон Ньютона для поступательного движения материальной точки (твердого тела): в инерциальной сис-
теме отсчета ускорение материальной точки (тела) прямо про- порционально величине равнодействующей силы и обратно про- порционально ее массе:
r |
= |
F |
|
|
|
a |
|
, |
|
(2.1) |
|
m |
|
||||
|
|
r |
n |
r |
|
где |
F |
= å Fi – равнодействующая сил, равная геометрической |
|||
|
|
|
|
i=1 |
|
сумме сил, действующих на материальную точку (тело), m – масса материальной точки (тела). Направление ускорения совпадает с направлением равнодействующей сил.
Векторная величина p , численно равная произведению массы ма-
териальной точки на ее скорость и имеющая направление скорости, называется импульсом (количеством движения):
p = mυ . |
(2.2) |
Используя понятие импульса, второй закон Ньютона может быть сформулирован в следующем виде: производная импульса мате-
риальной точки по времени равна равнодействующей сил:
r |
= |
dp |
|
|
|
F |
. |
(2.3) |
|||
|
|||||
|
|
dt |
|
||
Изменение импульса материальной точки (тела) при действии на нее силы:
r |
t , |
(2.4) |
p = F |
||
где F |
t – импульс силы, |
F – средняя сила, действующая на точку |
(тело) в течение времени |
t . |
|
Третий закон Ньютона: две материальные точки (два тела) действуют друг на друга с силами, равными по модулю и направ-
ленными в противоположные стороны вдоль соединяющей эти точки прямой. Эти силы приложены к разным материальным
14
точкам (телам), действуют парами и имеют одну природу (гра- витационную – силы тяготения, или электромагнитную – упруго- сти, трения).
Силы трения – силы, действующие вдоль соприкасающихся поверхностей тел и препятствующие их перемещению друг относительно друга.
Сила трения скольжения возникает в плоскости касания двух соприкасающихся тел при их относительном перемещении и описывается законом Амонтона-Кулона. Величина силы определяется
выражением: |
|
F = μN , |
(2.5) |
где μ – коэффициент трения скольжения, N – нормальная состав-
ляющая силы реакции опоры (нормального давления).
Различают также силы трения покоя (трение при отсутствии относительного перемещения соприкасающихся тел) и внутреннее трение (трение между слоями движущейся текучей среды – жидкости или газа).
При деформации тел в них возникают силы упругости, которые стремятся вернуть размер и форму тела в первоначальное состояние.
Закон Гука: для упругих деформаций сила упругости прямо про- порциональна величине абсолютной деформации x тела:
F = −kx , |
(2.6) |
где k – коэффициент жесткости, характеризующий упругие свойства тела. Знак минус указывает на то, что деформация и направление действующей сила противоположны.
3. ГРАВИТАЦИОННОЕ ВЗАИМОДЕЙСТВИЕ
Закон всемирного тяготения: между любыми двумя матери-
альными точками действует сила взаимного притяжения, прямо пропорциональная произведению масс этих точек и обратно про- порциональная квадрату расстояния между ними:
F = |
Gm1m2 |
, |
(3.1) |
|
r 2 |
||||
|
|
|
||
|
|
|
15 |
где G – гравитационная постоянная, m1 и m2 – массы материальных точек (сферических тел), r – расстояние между двумя материальными точками или центрами сферических тел, т.к. этот закон выполняется также для тел, обладающих сферически симметричным распределением массы.
Сила тяготения, действующая на тело, которое находится у поверхности Земли, называется силой тяжести. Сила тяжести
равна: |
|
r |
(3.2) |
Fm = mg , |
где g – вектор ускорения свободного падения вблизи поверхности
Земли.
Сила, с которой тело действует на опору или подвес вследствие притяжения к Земле, называется весом тела.
Невесомость – состояние тела, при котором в телах полностью отсутствуют внутренние упругие напряжения, возникающие под действием силы тяжести в обычных условиях. Состояние невесомости имеет место, например, при движении тел под действием только силы тяготения, когда отсутствует действие на опору или подвес со стороны невесомого тела.
4. ЭНЕРГИЯ. РАБОТА. МОЩНОСТЬ.
ЗАКОНЫ СОХРАНЕНИЯ ИМПУЛЬСА И ЭНЕРГИИ
Совокупность взаимодействующих материальных точек (тел) на-
зывается механической системой.
Силы, возникающие при взаимодействии между телами системы – внутренние. Силы, с которыми действуют внешние тела на тела системы – внешние.
Замкнутая (изолированная) система – механическая систе-
ма, на которую не действуют внешние силы.
Закон сохранения импульса: импульс замкнутой механиче- ской системы при любых взаимодействиях внутри ее сохраняет- ся, т. е. не изменяется со временем:
n |
r |
(4.1) |
åmi υi = const . |
||
i=1 |
|
|
|
|
16 |

Энергия – универсальная мера различных форм движения и взаимодействия всех видов материи.
Работа силы – количественная характеристика, используемая для описания процесса обмена энергией между взаимодействующими телами механической системы.
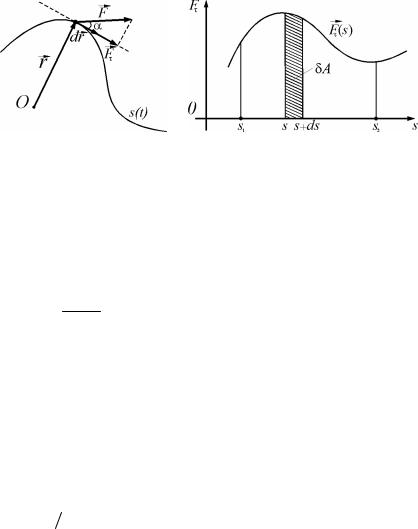
Механическая работа постоянной силы равна скалярному произведению силы F и перемещения тела s :
r |
= Fs cos a *, |
(4.2) |
A = F × s |
где α – угол между вектором силы и вектором перемещения
(рис. 1.4).
В зависимости от знака косинуса угла α работа силы может быть как положительной, так и отрицательной. Работа силы, действующей перпендикулярно направлению перемещения, равна нулю.
Работа переменной силы на криволинейном участке
пути: |
|
|
r |
= Fτ dr = Fdr cos a , |
(4.3) |
dA = F × dr |
||
где Fτ – |
проекция силы на направление перемещения. Смотри |
|
также пояснения на стр. 17. |
|
|
A = ò F cos ads . |
(4.4) |
|
s |
|
Fτ (s) , то работа силы пред- |
Если построить график зависимости |
||
ставляет собой площадь криволинейной трапеции – заштрихованная часть на рис. 1.5.
Потенциальная (консервативная) сила – сила, работа кото-
рой зависит только от начального и конечного положений точки ее приложения и не зависит от вида траектории этой точки и закона их движения (например, силы гравитационного взаимодействия).
Диссипативная (непотенциальная) сила – сила, суммарная работа которой при любых перемещениях замкнутой системы все-
* Здесь и далее символом “×” обозначено скалярное произведение векторов.
17
гда отрицательна (например, силы трения скольжения и силы сопротивления движению тел в жидкостях и газах).
Элементарную работу непотенциальной силы нельзя представить в виде полного дифференциала, поэтому элементарная работа произвольной силы обозначена δA .
Рис. 1.4 Рис. 1.5
Средняя мощность – физическая величина, равная отношению
работы |
А к промежутку времени |
t , за который она совершена, |
||
т.е. она характеризует скорость совершения работы: |
||||
N = |
DA |
. |
(4.5) |
|
Dt |
||||
|
|
|
||
Мгновенная мощность определяется выражениями:
N = dA = d(Fτ s) , (4.6) dt dt
r
N = Fυcos α ; N = F × u , (4.7)
где u – мгновенная скорость движения точки приложения силы.
Потенциальная энергия системы – зависящая от положения тел (или частей одного и того же тела) величина, изменение которой равно работе внутренних консервативных сил системы, взятой с противоположным знаком. Таким образом, потенциальная энергия – энергия взаимодействия.
Потенциальная энергия упругодеформированного тела:
Eп = kx2 2 , |
(4.8) |
|
18 |

где k – коэффициент жесткости, x – величина абсолютной деформации тела, например, изменение длины пружины.
Потенциальная энергия гравитационного взаимодействия материальных точек:
Eп = − Gm1m2 , (4.9) r
где G – гравитационная постоянная, m1 и m2 – массы материаль-
ных точек (сферических тел), r – расстояние между двумя материальными точками (центрами сферических тел).
Потенциальная энергия тела в однородном поле тяжести:
Еп |
= mgh , |
(4.10) |
где |
g – ускорение свободного падения, |
h – изменение положения |
тела по высоте относительно уровня нулевой потенциальной энергии.
Кинетическая энергия тела – мера его механического движения, определяющаяся работой, которую необходимо совершить, чтобы вызвать данное движение. Для материальной точки кинетическая энергия равна:
Eк = mυ2 2 = p2 (2m), |
(4.11) |
где m – масса точки, υ – ее скорость, |
p = mυ – импульс. |
Закон сохранения механической энергии: в замкнутой системе тел, между которыми действуют только консерватив- ные силы, механическая энергия сохраняется, т.е. не изменяется со временем:
E = å Eк + å Eп = const . |
(4.12) |
Работа сил потенциальных полей: |
|
A = Eп1 − Eп2 , |
(4.13) |
где Eп1 − Eп2 – убыль потенциальной энергии тела в данном поле при перемещении из некоторого первого положения во второе.
19
Закон изменения кинетической энергии системы: кине-
тическая энергия системы изменяется за счет работы внешних и внутренних сил:
A = Eк2 − Eк1 , |
(4.14) |
где Eк1 и Eк2 – кинетическая энергия тела в начальном и конечном состоянии.
5. МЕХАНИКА ТВЕРДОГО ТЕЛА
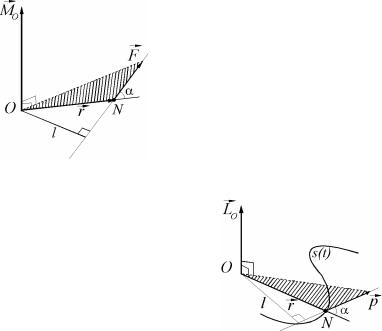
Моментом силы М O относи-
тельно некоторой точки О называется физическая величина, равная векторному произведению радиусвектора r , проведенного из точки O в точку приложения силы, и
|
|
|
|
|
|
вектора силы F : |
|
|
|
|
|
|
|
|
r |
× F . |
(5.1) |
|
|
|
|
|
|
M O = r |
||
|
Рис. 1.6 |
|
|
|
|
|
||
Моментом импульса LO от- |
|
|
||||||
носительно некоторой точки О |
|
|
||||||
называется |
физическая |
величи- |
|
|
||||
на, равная векторному произве- |
|
|
||||||
дению радиус-вектора r , про- |
|
|
||||||
веденного из точки |
O в точку, |
|
|
|||||
где находится |
тело, |
и |
вектора |
Рис. 1.7 |
|
|||
импульса |
p |
тела: |
|
|
|
|||
|
|
|
|
|||||
r |
r |
|
r |
r |
|
|
|
(5.2) |
LO = r |
× p |
= m(r |
× υ). |
|
|
|
||
Уравнение моментов: производная по времени момента импульса материальной точки относительно неподвижной точки О равна моменту действующей силы относительно этой же точки.
20