

26.4. Соединения типа «вал–ступица». Общая характеристика и особенности расчета
Для передачи вращения от вала к ступице зубчатого колеса, шкива, звездочки и других соосных деталей широко используют различные соединения зацеплением. В соединениях зацеплением (шпоночных, шлицевых и др.) передача нагрузки осуществляется за счет силового замыкания деталей через шпонки, зубья и другие подобные детали. Благодаря этому соединения являются разъемными, осуществляют фиксацию деталей в окружном направлении и допускают осевое взаимное смещение деталей в процессе работы. Однако трудоемкость изготовления таких соединений довольно высокая.
26.4.1. Шпоночные соединения
Соединение двух соосных цилиндрических деталей (вала и ступицы) для передачи вращения между ними осуществляется с помощью шпонки 1 – специальной детали, закладываемой в пазы соединяемых вала 2 и ступицы 3 (рис. 26.12).
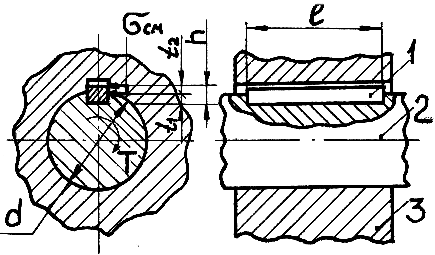
Рис. 26.12. Соединение призматической шпонкой
В машиностроении применяют ненапряженные (без нагрузки) соединения (с помощью призматических и сегментных шпонок) и напряженные (с помощью клиновых шпонок). Шпонки этих типов стандартизованы, их размеры выбирают по ГОСТ 23360–78, ГОСТ 24071–80 и ГОСТ 24068–80.
Основные достоинства соединений: простота конструкции и воз–можность жесткой фиксации насаживаемой детали в окружном направлении.
Однако соединения трудоемки в изготовлении, требуют ручной пригонки или подбора. Это ограничивает использование соединений в машинах крупносерийного и массового производства. Не рекомендуется применение соединений для быстро вращающихся валов ответственного назначения из-за сложности обеспечения концентричной посадки сопрягаемых деталей.
Основным для соединений призматическими шпонками является условный расчет на смятие (упругопластическое сжатие в зоне контакта).
Если принять для упрощения, что напряжения в зоне контакта распределены равномерно и плечо равнодействующей этих напряжений равно 0,5d (где d – диаметр вала), то средние контактные напряжения (напряжения смятия, вызывающие смятие рабочих граней)
![]() (26.4)
(26.4)
где T – вращающий момент;
lp – рабочая длина шпонки (см. рис. 26.12);
t2 = 0,4h – глубина врезания шпонки в ступицу;
![]() –
допускаемое
напряжение на смятие.
–
допускаемое
напряжение на смятие.
На
практике сечение шпонки подбирают по
ГОСТ 23360–78 в зависимости от диаметра
вала, а длину l
шпонки
назначают на 5–10 мм меньше длины
ступицы. Затем по формуле (26.4) оценивают
прочность соединения на смятие или
вычисляют предельный момент,
соответствующий напряжению
![]() .
.
26.4.2. Шлицевые соединения
Общие сведения. Шлицевое соединение условно можно рассматривать как многошпоночное, у которого шпонки выполнены как одно целое с валом. По сравнению со шпоночными соединениями они имеют меньшие радиальные габариты, высокую несущую способность, взаимозаменяемы и обеспечивают хорошее центрирование деталей. Эти преимущества позволяют использовать соединения в условиях массового производства конструкций и при большей частоте вращения валов (рис. 26.14).
По форме поперечного сечения различают три типа соединений: прямобочные ГОСТ 1139–80; эвольвентные ГОСТ 6033–80; треугольные (изготовляются по отраслевым стандартам).
Проектирование и расчет соединений. Основные размеры (наружный диаметр D и длину l) шлицевого соединения задают при конструировании вала. Длину соединения принимают не более 1,5D; при большей длине существенно возрастают неравномерность распределения нагрузки вдоль зубьев и трудоемкость изготовления.
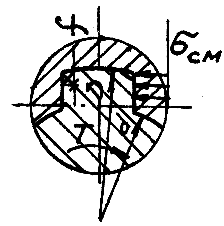
Рис. 26.13. Расчетная схема зуба шлицевого соединения
Учитывая, что соединения в машинах выходят из строя преимущественно из-за повреждения рабочих поверхностей зубьев (смятие, износ) и усталостного разрушения шлицевых валов, после проектирования выполняют проверочный расчет зубьев.
Условие прочности по допускаемым напряжениям смятия имеет вид
![]()
где dm – средний диаметр соединения;
z – число зубьев;
h и l– соответственно высота и длина поверхности контакта зубьев;
ψ – коэффициент, учитывающий неравномерное распределение нагрузки между зубьями и вдоль зубьев (ψ = 0,5–0,7);
![]() –допускаемое
напряжение смятия на боковых поверхностях.
–допускаемое
напряжение смятия на боковых поверхностях.