

10.3. Работа переменной силы на криволинейном пути
Чтобы
определить работу непостоянной силы F
при перемещении точки М
по криволинейной траектории
![]() ,
надо дугу
,
надо дугу![]() траектории разделить на множество
частей
траектории разделить на множество
частей![]() ,
настолько малых, что каждую из них можно
считать отрезком прямой (рис. 10.4,а).
Тогда работа силы F
на перемещении
,
настолько малых, что каждую из них можно
считать отрезком прямой (рис. 10.4,а).
Тогда работа силы F
на перемещении
![]() ,
так называемаяэлементарная
работа:
,
так называемаяэлементарная
работа:
![]()
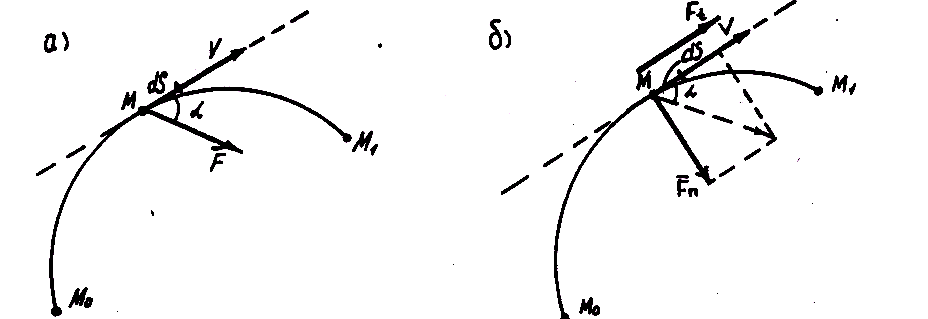


а б
Рис. 10.4. Работа переменной силы при перемещении
по криволинейной траектории
Просуммировав
все элементарные работы переменной
силы
![]() ,
получим ее работу на участке траектории
отM0
до M1:
,
получим ее работу на участке траектории
отM0
до M1:
 (10.2)
(10.2)
Разложив
силу
![]() на составляющие
на составляющие![]() и
и![]() ,
направленные соответственно по нормали
и касательной, увидим, что работа
нормальной составляющей равняется нулю
и, следовательно, в формуле (10.2) произведение
,
направленные соответственно по нормали
и касательной, увидим, что работа
нормальной составляющей равняется нулю
и, следовательно, в формуле (10.2) произведение![]() выражает модуль касательной составляющей
силы
выражает модуль касательной составляющей
силы![]() ,
т. е.
,
т. е.
![]() ,
и этой формуле можно придать вид
,
и этой формуле можно придать вид
Интегралы могут быть определены лишь в том случае, если известен закон движения точки.
10.4. Мощность
Скалярная величина
![]()
характеризующая быстроту совершения работы, называется средней мощностью силы. В СИ мощность выражается в ваттах:
![]()
![]()
Если в течение некоторого времени t мощность машины остается постоянной или меняется несущественно, то произведенная работа выражается формулой
![]() ,
,
отсюда и появляется единица времени 1 кВт · ч = 103 Вт · 3600 c = = 3,6 · 106.
10.5. Механический коэффициент полезного действия
В технике работа сил обычно связана с преодолением различных сопротивлений, для выполнения этой работы создается множество разнообразных машин и механизмов.
Силы сопротивления
![]() ,
которые преодолевает любая машина
(механизм):
,
которые преодолевает любая машина
(механизм):
– полезное сопротивление Fпс, для преодоления которого машины или механизмы и предназначены;
– вредное сопротивление Fвс, которое приходится вынужденно преодолевать попутно с полезным.
Тогда вся работа, которую совершает машина или механизм:
![]()
где
![]() – работа по преодолении полезного
сопротивления, отсюда
– работа по преодолении полезного
сопротивления, отсюда
![]()
Отношение полезной работы ко всей совершенной работе называется механическим коэффициентом полезного действия:
![]()
В технике распространены случаи работы машин при их последовательном соединении друг с другом.
Допустим, имеется
совокупность трех механизмов с КПД
![]() (рис. 10.5). Если работа, совершенная
механизмами,
(рис. 10.5). Если работа, совершенная
механизмами,![]() и
их полезная работа
и
их полезная работа![]() ,
то КПД всех точек механизмов
,
то КПД всех точек механизмов
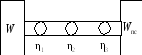
Рис. 10.5. Последовательное соединение машин
Вывод: чем длиннее «цепочка» совместно работающих механизмов, тем меньше её общий КПД, причем общий КПД всегда меньше самого низкого из числа перемножаемых КПД.
10.6. Работа сил на наклонной плоскости
Пусть требуется поднять на высоту h груз, сила тяжести которого G (рис. 10.6).
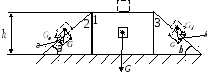
Рис. 10.6. Работа силы при поднятии груза
Предположим, что подъем осуществляется тремя способами:
– вертикально;
– по наклонной плоскости с углом подъема α;
– по менее крутой плоскости с углом подъема β (β < α).
Если считать, что груз перемещается равномерно, то работа при подъеме груза во всех трех случаях совершается одинаковая:
![]()
Но в первом случае
приходится преодолевать силу тяжести
G,
во втором –
![]() ,
в третьем –
,
в третьем –![]() .
.
Так как β < α, то
![]() ,
значит,
,
значит,![]()
Наклонная плоскость как одно из средств получения выигрыша в силе при перемещении тяжести широко используется в технике.
Если сила F направлена параллельно наклонной плоскости (рис. 10.7), то при перемещении вверх по наклонной плоскости тела на него кроме силы F действуют еще три силы:
– сила тяжести G, нормальная реакция наклонной плоскости Rn, значение которой
![]()
– сила трения Rf, значение которой
![]()
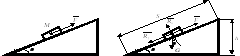
Рис. 10.7. Работа силы на наклонной плоскости
При равномерном подъеме тела М четыре силы образуют уравновешенную систему. Алгебраическая сумма работ этих сил равна нулю:

где
![]() – работа силы тяжести;
– работа силы тяжести;
![]() –работа силы
трения;
–работа силы
трения;
![]() –работа нормальной
реакции.
–работа нормальной
реакции.
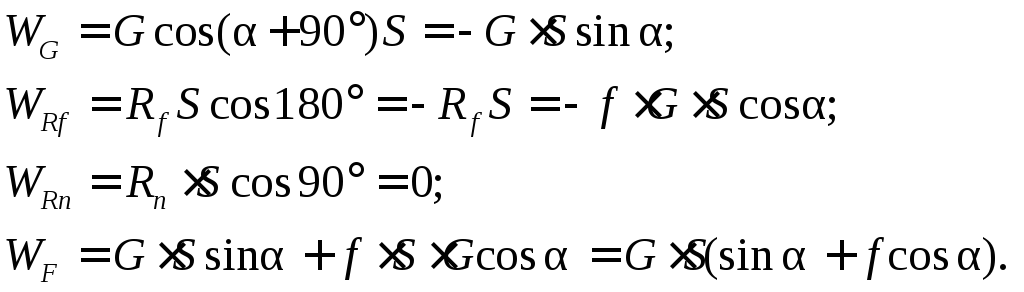
Если же требуется
определить значение силы F,
то с учетом того, что
![]() ,
получаем
,
получаем
![]()
Полезную часть
работы сил F
составляет работа по подъему тела на
высоту
![]() и
тогда
и
тогда
![]()
Таким образом, КПД наклонной плоскости при подъеме груза силой направленной параллельно наклонной плоскости:
![]()
![]()
Вывод: КПД наклонной плоскости зависит только от угла ее наклона и коэффициента трения при перемещении груза по плоскости.