

Глава 15. Методические указания к решению задач
15.1. Кинематика зубчатых механизмов
С неподвижными осями вращения
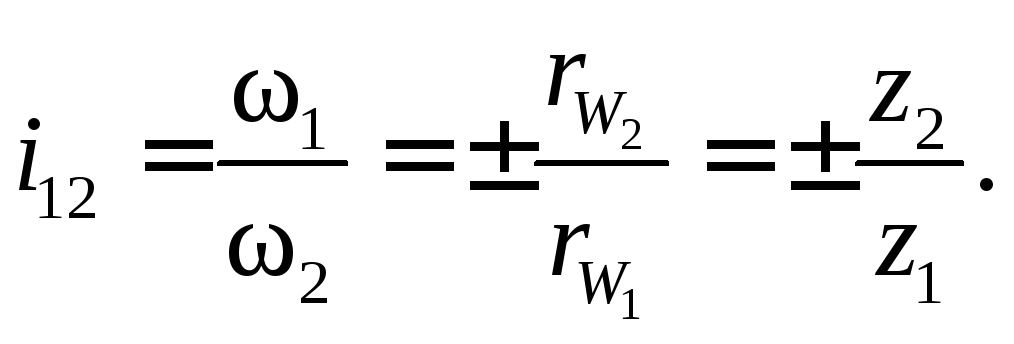
Основным кинематическим параметром зубчатого механизма является передаточное отношение.
Передаточным
отношением
![]() называется
отношение угловой скорости звена 1
(
называется
отношение угловой скорости звена 1
(![]() )
к угловой скорости звена2
(
)
к угловой скорости звена2
(![]() )
(рис. 15.1).
)
(рис. 15.1).
Очевидно, что
![]()
Если
![]() и
и![]() ,
то
,
то
![]()
где
![]() и
и![]() – частота вращения, мин–1,
звена 1
и звена 2.
– частота вращения, мин–1,
звена 1
и звена 2.
Для механизмов с параллельными осями передаточное отношение считается положительным при одинаковом направлении угловых скоростей и отрицательным – при противоположном.
Для цилиндрической передачи знак «плюс» соответствует внутреннему зацеплению (рис. 15.1, б), а «минус» – внешнему (рис. 15.1, а).
Рис. 15.1. К вопросу о передаточном отношении
Передаточное отношение можно представить в виде
Многоступенчатый
зубчатый механизм можно образовать
последовательным соединением колес
(рис. 15.2), при котором вращение от ведущего
вала О1
передается ведомому валу О4
через промежуточные валы О2
и O3,
на каждом из которых помещено по два
колеса: 2
и 2´,
3
и 3´.
Колёса 2
и 2´
жестко соединены с валом O2
и имеют общую угловую скорость
![]() ;
аналогично колёса3
и 3´
также жестко соединены с валом О3
и имеют общую угловую скорость
;
аналогично колёса3
и 3´
также жестко соединены с валом О3
и имеют общую угловую скорость
![]() .
.
На одной проекции (см. рис. 15.2) направление угловых скоростей показано круговыми стрелками, а на второй – прямыми.
При последовательном ступенчатом соединении колес передаточное отношение равно произведению передаточных отношений промежуточных зацеплений (см. рис. 15.2):

В данном случае имеем трехступенчатую передачу.

Рис. 15.2. Многоступенчатый зубчатый механизм
В общем случае передаточное отношение
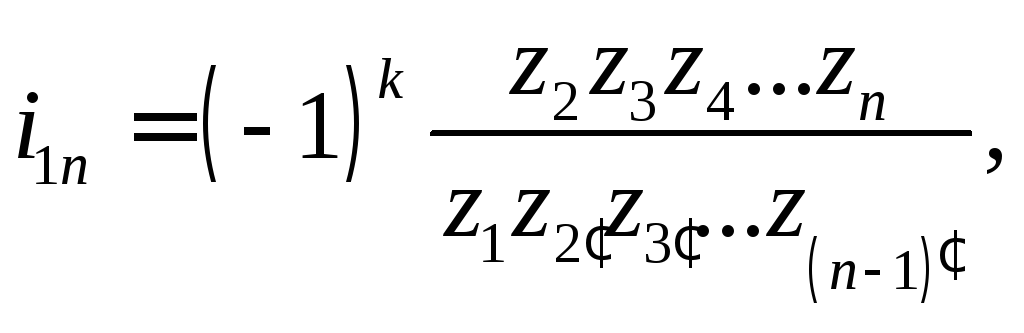 (15.1)
(15.1)
где k – число внешних зацеплений.
При простом последовательном соединении зубчатых колес (рис. 15.3) величина общего передаточного отношения не зависит от количества промежуточных (паразитных) колес:

В общем случае
![]() (15.2)
(15.2)
где K – число внешних зацеплений.
«Паразитные» колеса могут изменять знак передаточного отношения; например, при внешнем зацеплении (см. рис. 15.3) каждое четное колесо 2 и 4 вращается в сторону, противоположную вращению входного колеса 1, а каждое нечетное колесо 3 – в сторону вращения входного колеса 1.
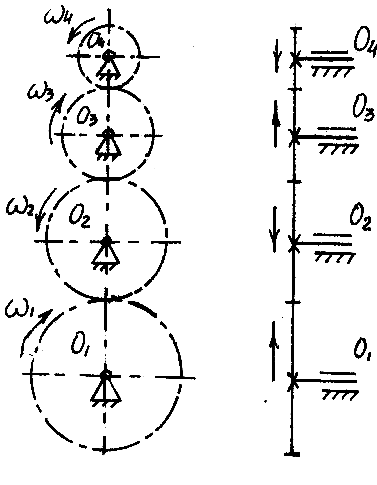
Рис. 15.3. Последовательное соединение зубчатых колес
На рис. 15.4 показано последовательное соединение, состоящее из трех колес: 1, «паразитное» 2 и выходное 3 с внутренним зацеплением. Передаточное отношение
![]()
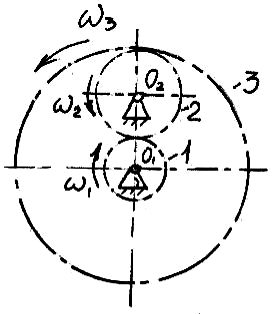
Рис. 15.4. Последовательное соединение трех колес
Передаточное отношение червячной передачи равно отношению числа зубьев колеса к числу витков червяка:
![]()
где
![]() –
число зубьев червячного колеса;
–
число зубьев червячного колеса;
![]() –
число
витков червяка;
–
число
витков червяка;
![]() и
и
![]() –
частота
вращения червяка и колеса, мин–1.
–
частота
вращения червяка и колеса, мин–1.
Механизм, изображенный на рис. 15.5, состоит из пары цилиндрических колес 1 и 2, пары конических колес 2´, 3 и червячной пары 3´ и 4, где звено 3´ – червяк, а 4 – червячное колесо. Общее передаточное отношение для этого механизма
![]()
где
![]() –
число зубьев червячного колеса;
–
число зубьев червячного колеса;
![]() –число витков
червяка.
–число витков
червяка.
Знак для общего передаточного отношения можно поставить лишь для того случая, когда входной и выходной валы вращаются относительно осей, параллельных друг другу.
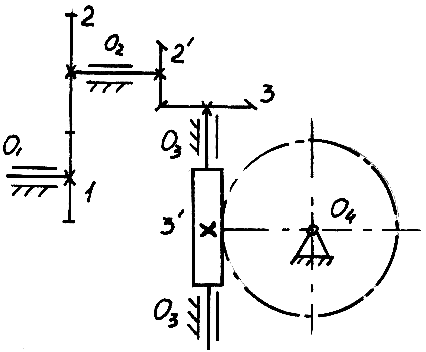
Рис. 15.5. Многоступенчатый механизм