

19.5. Расчеты на жесткость при изгибе
В ряде случаев работающие на изгиб элементы машиностроительных и строительных конструкций должны быть рассчитаны не только на прочность, но и на жесткость. К деталям, рассчитываемым на жесткость, относятся, в частности, валы зубчатых и червячных передач и многие части металлорежущих станков.
Расчет на жесткость элемента конструкции, имеющего форму бруса, заключается в определении наибольших перемещений его поперечных сечений и сопоставлении их с допускаемыми, зависящими от назначения и условий эксплуатации данного элемента.
Рассмотрим простую консоль, нагруженную на свободном конце силой F, линия действия которой совпадает с одной из главных осей поперечного сечения балки (рис. 19.10).
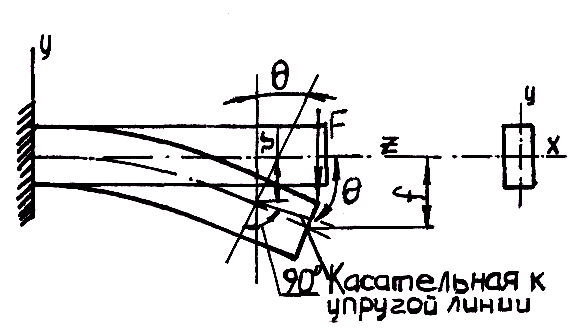
Рис. 19.10. Линейное и угловое перемещения сечения при изгибе
При деформации балки центры тяжести ее поперечных сечений получают линейные перемещения, а сами сечения поворачиваются вокруг своих нейтральных осей. Допущение о малости перемещений позволяет считать, что направления линейных перемещений перпендикулярны продольной оси недеформированного бруса. Эти перемещения принято называть прогибами. Прогиб произвольного сечения обозначим ν, а наибольший прогиб – стрелу прогиба – f. Геометрическое место центров тяжести поперечных сечений деформированного бруса, т. е. ось изогнутого бруса, условно называют изогнутой осью, или, чаще, упругой линией.
Угол поворота θ поперечного сечения равен углу между касательной к упругой линии в данной точке и осью недеформированного бруса.
Вывод: ордината упругой линии и угол наклона касательной, проведенной к ней в данной точке, полностью определяют линейное и угловое перемещения соответствующего поперечного сечения балки.
В большинстве случаев условие жесткости выражается неравенством
![]()
т. е.
максимальный прогиб (стрела прогиба f)
не должен превышать допускаемого
![]() .
Значение допускаемого прогиба зависит
от назначения и условий работы
рассчитываемой конструкции и колеблется
в широких пределах. Обычно допускаемую
стрелу прогиба указывают в долях пролета
(межопорного расстояния l)
балки. Например, для ручных грузоподъемных
кранов
.
Значение допускаемого прогиба зависит
от назначения и условий работы
рассчитываемой конструкции и колеблется
в широких пределах. Обычно допускаемую
стрелу прогиба указывают в долях пролета
(межопорного расстояния l)
балки. Например, для ручных грузоподъемных
кранов
![]() ,
для электрических
,
для электрических
![]() ,
для валов и шпинделей металлорежущих
станков
,
для валов и шпинделей металлорежущих
станков
![]() = (0,0005–0,0010) l.
= (0,0005–0,0010) l.
Для обеспечения нормальной работы подшипников скольжения и роликовых подшипников качения иногда ставится дополнительное условие жесткости – ограничение угла поворота опорных сечений:
![]()
При этом допускаемый угол поворота составляет в среднем 0,001 радиан.
19.6. Кручение вала (стержня) круглого поперечного сечения
Кручение – это такой вид деформации бруса, при котором в его поперечных сечениях возникает единственный внутренний силовой фактор – крутящий момент, обозначаемый Mz или Tk.
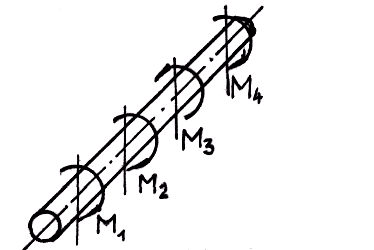
На рис. 19.11 изображен брус, работающий на кручение под действием приложенных к нему скручивающих моментов (M1, M2, M3, М4).
Во всех случаях будем считать, что алгебраическая сумма скручивающих моментов равна нулю, т. е. брус находится в равновесии.
Применяя метод сечений и рассматривая равновесие оставленной части (рис. 19.12), приходим к выводу, что внутренние силы, возникающие в поперечном сечении бруса, должны дать момент (крутящий момент), уравновешивающий внешние моменты, приложенные к оставленной части.
|
|
|
|
Рис. 19.11. Крутящие моменты вала |
Рис. 19.12. Кручение вала |
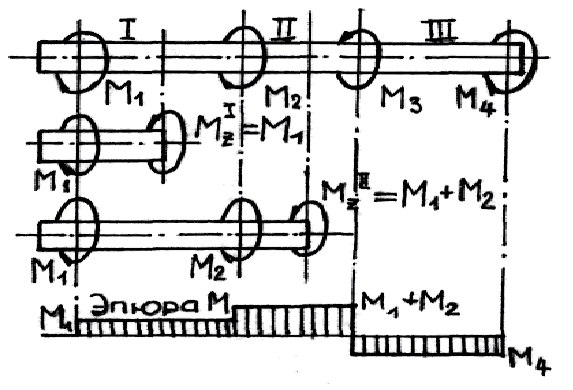
Итак, крутящий момент, возникающий в произвольном поперечном сечении бруса, численно равен алгебраической сумме скручивающих моментов, приложенных к оставленной части.
При кручении бруса в его поперечных сечениях возникают только касательные напряжения.
Для расчета на прочность, так же как и при растяжении (сжатии) бруса, надо найти его опасное сечение. В случае, если размеры поперечного сечения по длине бруса постоянны, опасными будут сечения, в которых крутящий момент максимален. График, показывающий закон изменения крутящих моментов по длине бруса, называется эпюрой крутящих моментов (см. рис. 19.12).
Правило знаков: будем считать крутящий момент положительным, если для наблюдателя, смотрящего на проведенное сечение, он представляется направленным по часовой стрелке (рис. 19.13). Соответствующий внешний момент направлен против часовой стрелки.
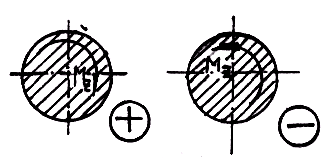
Рис. 19.13. Правило знаков для Mz