

6.2. Способы задания движения точки
Существует три способа задания движения: естественный, координатный, векторный.
Естественный
способ задания движения точки.
Если кроме траектории, на которой
отмечено начало отсчета O,
задана зависимость
![]() между
расстоянием S
и временем t,
это уравнение называется законом
движения точки по заданной траектории
(рис. 6.5).
между
расстоянием S
и временем t,
это уравнение называется законом
движения точки по заданной траектории
(рис. 6.5).
Пример:
![]()
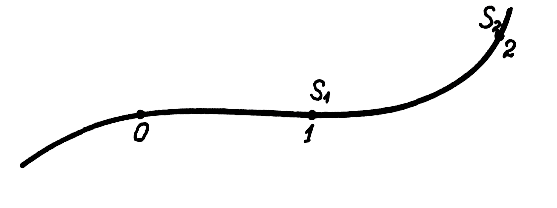
Рис. 6.5. Траектория движения точки
Пусть,
например, задана некоторая траектория,
движение точки по которой определяется
уравнением
![]()
![]() .
Тогда в момент времени
.
Тогда в момент времени
![]()
![]() ,
т. е. точка находится в начале отсчета
O;
в момент времени
,
т. е. точка находится в начале отсчета
O;
в момент времени
![]() точка находится на расстоянии
точка находится на расстоянии
![]() ;
в момент времени
;
в момент времени
![]() точка находится на расстоянии
точка находится на расстоянии
![]() от начала отсчета O.
от начала отсчета O.
Координатный
способ задания движения точки.
Когда траектория точки заранее не
известна, положение точки в пространстве
определяется тремя координатами:
абсциссой X,
ординатой Y
и
аппликатой Z
(рис. 6.6):
![]() или,
исключив время,
или,
исключив время,
![]() .
.
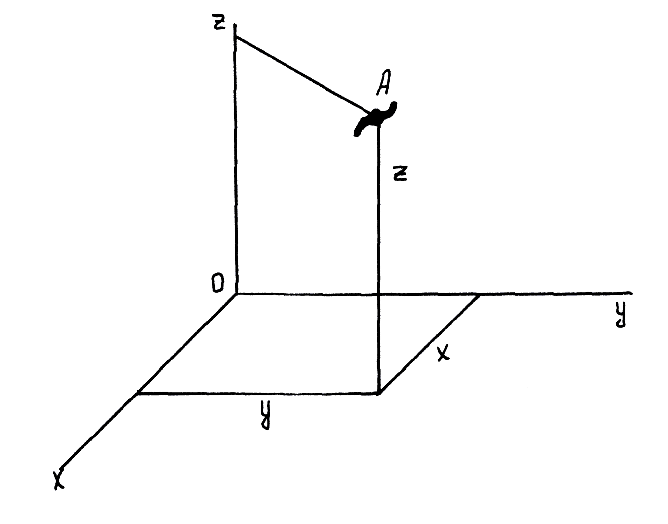
Рис. 6.6. Координатный способ задания движения точки
Эти уравнения выражают закон движения точки в прямоугольной системе координат (OXYZ).
В
частном случае, если точка движется в
плоскости, закон движения точки выражается
двумя уравнениями:
![]() или
или
![]() .
.
Пример
6.1.
Движение точки в плоской системе
координат задано уравнениями
![]() и
и![]() (X
и Y
– см, t
– с) (рис. 6.7). Тогда в момент времени
(X
и Y
– см, t
– с) (рис. 6.7). Тогда в момент времени
![]() и
и
![]() ,
т. е. точка находится в начале координат;
в момент времени
,
т. е. точка находится в начале координат;
в момент времени
![]() координаты точки
координаты точки
![]() ,
,
![]() ;
в момент времени
;
в момент времени
![]() координаты точки
координаты точки![]() ,
,![]() и т. д.
и т. д.

Рис. 6.7. К примеру 6.1
Зная закон движения точки в прямоугольной системе координат, можно определить уравнение траектории точки.
Например,
исключив время t
из заданных выше уравнений
![]() и
и![]() ,
получим уравнение траектории
,
получим уравнение траектории![]() .
Как видим, в этом случае точка движется
по прямой, проходящей через начало
координат.
.
Как видим, в этом случае точка движется
по прямой, проходящей через начало
координат.
6.3. Определение скорости точки при естественном способе задания ее движения
Пусть
движение точки А
по заданной траектории происходит
согласно уравнению
![]() ,
требуется определить скорость точки в
момент времени t
(рис. 6.8).
,
требуется определить скорость точки в
момент времени t
(рис. 6.8).
Рис. 6.8. Дуговая координата движения точки:
За
промежуток времени
![]() точка прошла путь
точка прошла путь
![]() ,
значение средней скорости на этом пути
,
значение средней скорости на этом пути
![]() ,
,
но оно отличается от значения скорости в момент времени t. Скорость в заданный момент t
![]() ,
,
т. е. значение скорости точки, движение которой задано естественным способом, в любой момент времени равно первой производной от расстояния (дуговой координаты) по времени.
Направление скорости, как отмечалось выше, известно заранее.
6.4. Определение ускорения точки при естественном способе задания ее движения
Вектор
![]() – ускорение точки в данный момент (рис.
6.9, а)
– есть геометрическая сумма касательного
– ускорение точки в данный момент (рис.
6.9, а)
– есть геометрическая сумма касательного
![]() и нормального
и нормального
![]() ускорений:
ускорений:
![]()
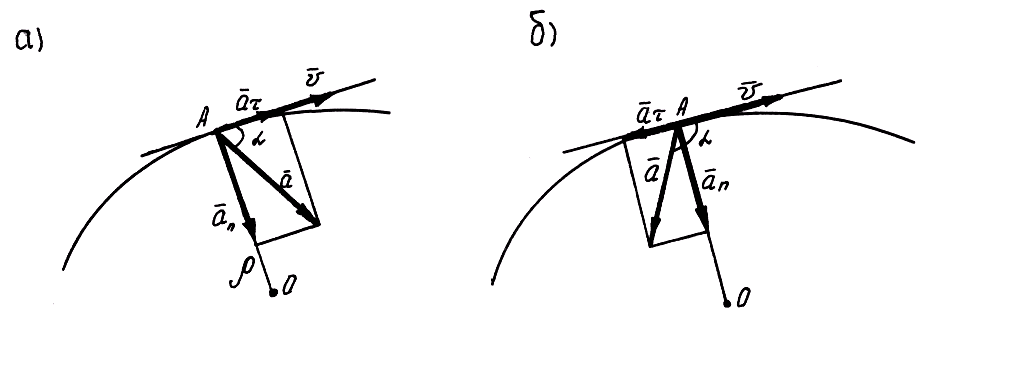
Рис. 6.9. Нормальное (а) и касательное (б) ускорения точки
Вектор
![]() в любой момент времени направлен по
касательной (рис. 6.9, б),
поэтому вектор
в любой момент времени направлен по
касательной (рис. 6.9, б),
поэтому вектор
![]() называется касательным,
или
тангенциальным
ускорением.
Модуль касательного ускорения
называется касательным,
или
тангенциальным
ускорением.
Модуль касательного ускорения
![]() ,
,
равный производной от скорости в данный момент по времени или, иначе, второй производной от расстояния по времени, характеризует быстроту изменения значения скорости.
Доказано,
что вектор
![]() в любой момент времени перпендикулярен
касательной, поэтому он называется
нормальным
ускорением:
в любой момент времени перпендикулярен
касательной, поэтому он называется
нормальным
ускорением:
![]() .
.
Значит, модуль нормального ускорения пропорционален второй степени модуля скорости в данный момент, обратно пропорционален радиусу кривизны траектории в данной точке и характеризует быстроту изменения направления скорости.
Модуль ускорения
![]() ,
,
а
направление a
(угол
![]() )
находим с помощью тригонометрических
функций по одной из следующих формул:
)
находим с помощью тригонометрических
функций по одной из следующих формул:
Если
векторы
![]() и
и
![]() направлены
в одну и ту же сторону, то движение точки
называется ускоренным.
При этом значения
направлены
в одну и ту же сторону, то движение точки
называется ускоренным.
При этом значения
![]() и
и
![]() имеют одинаковые знаки (
имеют одинаковые знаки (![]() или
или
![]() ).
Если же векторы
).
Если же векторы
![]() и
и
![]() направлены
в противоположные стороны, то движение
точки называется замедленным.
В этом случае знаки
направлены
в противоположные стороны, то движение
точки называется замедленным.
В этом случае знаки
![]() и
и
![]() разные (
разные (![]() или
или
![]() ).
).