

2.2.3 Построение диаграммы перемещения (Рис.2.3).
Аналогично, интегрируя диаграмму аналога скорости (скорости) dS/d=f() (dS/dt=f(t)) в зависимости от угла поворота кулачка (в зависимости от времени), строим диаграмму перемещения ведомого звена в зависимости от угла поворота кулачка (в зависимости от времени). К1О= 32,1857 мм.
Необходимо, так же отметить, что перпендикуляры из середин интервалов на оси угла поворота кулачка обязательно восстанавливать до пересечения с кривой графика dS/d=f(), (); dS/dt=f(t), (t).
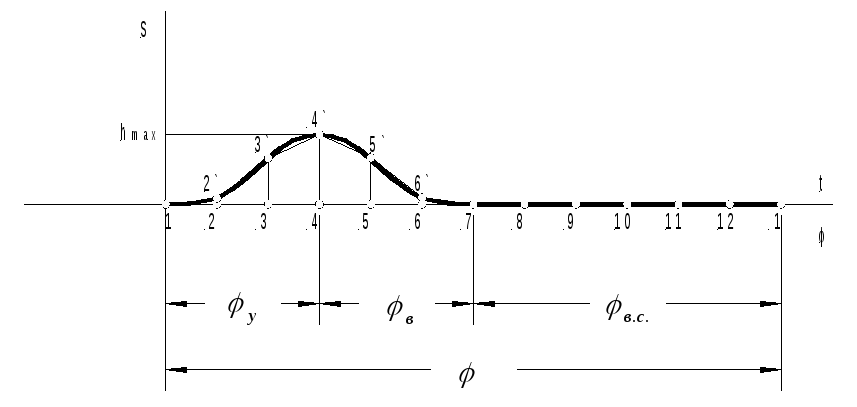 Рис.2.3.
Рис.2.3.
На
построенной диаграмме перемещения
толкателя находим угол удаления (![]() ),
угол возвращения (
),
угол возвращения (![]() ),
угол дальнего стояния (.
),
угол дальнего стояния (.![]() ),
угол ближнего стояния (
),
угол ближнего стояния (![]() )
На диаграммеS=f(),
(S=f(t))
находим максимальную ординату hmax,
соответствующую максимальному ходу
толкателя H.
Зная hmax
и H,
можно определить масштабные коэффициенты
диаграммы перемещений толкателя:
)
На диаграммеS=f(),
(S=f(t))
находим максимальную ординату hmax,
соответствующую максимальному ходу
толкателя H.
Зная hmax
и H,
можно определить масштабные коэффициенты
диаграммы перемещений толкателя:
 м/мм.
м/мм.
Масштаб скорости на диаграмме аналога скорости (скорости) равняется:
 ;
;
Масштаб аналога скорости найдем по формуле:
 ;
;
Масштабный коэффициент ускорений на диаграмме ускорений:
 ;
;
Масштаб аналога ускорения равен:
 ;
;
2.3 Определение минимального радиуса профиля кулачка (Рис.2.4).
Определяем минимальный радиус теоретического профиля кулачка с помощью совмещенной диаграммы S=f(dS/d), учитывая максимально допустимый угол давления.
Строим диаграмму S=f(dS/d).
На
вертикальной оси координат откладываем
вверх от начала отсчета отрезки 1-2'',
1-3'',1-4'' …, равные отрезкам 2-2'', 3-3'', 4-4'' …
на диаграмме перемещений толкателя.
Из точек 2'',3'',4'' … восстанавливаем
перпендикуляры к оси перемещений
толкателя, на которых откладываем
отрезки 2''-2', 3''-3', 4''-4', … равные отрезкам
2-2', 3-3', 4-4', … на диаграмме аналога
скоростей (скоростей), помноженным на
 ,
для соблюдения единого масштаба
совмещенной диаграммыS=f(dS/d).
,
для соблюдения единого масштаба
совмещенной диаграммыS=f(dS/d).
Точки 1,2,3,…11,12 соединяем плавной кривой. Получили диаграмму S=f(dS/d).
Справа и слева от оси строим максимально допустимый угол давления так, чтобы одна сторона угла была касательной к диаграмме S=f(dS/dj), а вторая параллельна оси S.
На расстоянии e'=e/s мм (e'= 4,2 мм) от оси S проводим прямую параллельную оси перемещений S. На пересечении этой прямой с правой касательной получаем точку T2, соединяя которую с точкой 1, получим минимальный радиус профиля кулачка.
R'min= 21,3355 мм;
R min =R'min.s= 21,3355 0,002= 0,04267 м.
Это и есть реальный (теоретический)минимальный радиус кулачка.
2.4 Построение профиля кулачка.
Зная R'min, строим в соответствующем масштабе теоретический профиль кулачка, принимая масштабный коэффициент длины:
l=s=0,002 м/мм
Задача построения кулачка наиболее просто решается при помощи метода обращения движения. Сообщаем всему кулачковому механизму общую угловую скорость (-) вокруг центра О вращения кулачка, равную по модулю и обратную по направлению угловой скорости кулачка. Тогда кулачок будет в обращенном движении как бы неподвижен, однако относительное расположение толкателя и кулачка не нарушается.
Из центра О проводим окружности радиусов R'min и e'. Окружность е' делим на 12 равных частей радиусами О-1, О-2, О-3,… . Через точки 1,2,3,… проводим лучи 1-1, 2-2, 3-3, … откладываем от окружности радиусом e'.На лучах 1-1, 2-2, 3-3, … откладываем по окружности радиусом R'min отрезки, равные отрезкам 1-1'', 2-2'', 3-3'', … на диаграмме перемещений. Полученные точки 1, 2, 3 … соединяем плавной кривой. Получили теоретический профиль кулачка, то есть кривую, по которой движется центр толкателя в обращенном движении.
Для получения практического профиля кулачка нужно построить огибающую дуг радиуса R ролика, имеющих центры на теоретическом профиле. Rрол ~ 0,3 ... 0,4 R min.
Rрол=0,043 м.
Синтез кулачкового механизма закончен. На чертежал следует показать все исходные параметры и их численные значения и все полученные параметры.