

Мальханов - Общая Физика
.pdfЗамечание. Рассмотрим поле центральных сил
F = f ( r ) r/r
dL/dt = M внешн.сил = r×F =
r× f (r )r/r = (так как r×r≡0) ≡ 0
L =cst
r/r - орт центр

F
тело 
То есть, для центральных сил момент импульса всегда сохраняется в силу особенности самих центральных сил.
Наряду с законами сохранения импульса и энергии, закон сохранения момента импульса является важнейшим из фундаментальных законов физики.
∑pi = cst - однородность пространства,
∑Ti + ∑ Ui = Е =cst - однородность времени,
∑Li = cst - изотропность пространства
§12 Момент импульса относительно неподвижной оси. Момент инерции твердого тела
Модель абсолютно твердого тела определяется как система связанных частиц с неизменными расстояниями между ними
Мы имеем формулу момента импульса для вращения твердого тела (системы частиц) относительно произвольной точки
L = r×p = m r×v.
51

|
Ось Z |
ω |
vi |
|
|
|
|
Li |
hg Liz |
|
|
|
|
Ri |
|
|
αi |
αi |
mi |
|
|
||
ri
ц.м.
Тогда модуль вектора L для i -й точки запишется в виде
L iz /Li = Ri/ri
=
= Cos αi Ri = ri Cos αi
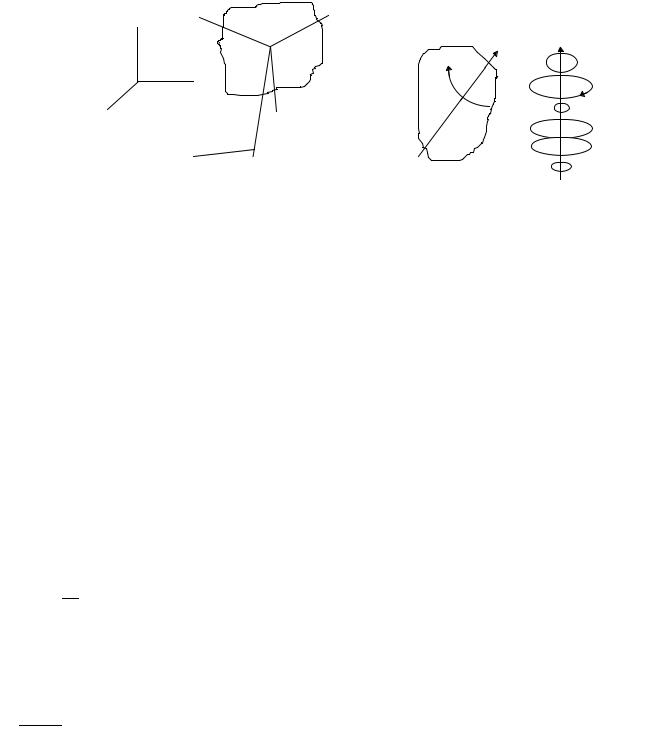
Рассмотрим
вращение твердого тела вокруг неподвижной оси. Ось для надежности “зажата” в шарнирах.
Li = mi ri vi = mi ri ωRi.
L, v, r - тройка взаимно перпендикулярных векторов, объединяемая векторным произведением.
Отступление-ретроспектива:
Было произвольное вращение и поступательное движение одновременно. Мы а) совместили равномерное движение центра масс тела с началом инерциальной системы отсчета, движущейся с той же самой скоростью - таким
образом мы оказались в неподвижной системе отсчета;
б) вращение относительно осей x, y и z, вообще говоря, осталось произвольным;
в) после этого мы зафиксировали ось и оказались в модели вращения вокруг неподвижной оси - это так называемое плоское вращение, при котором любая точка тела описывает окружность.
52
|
Z |
Z |
Y |
|
O |
Y |
|
X |
|
|
|
Точку О сов- |
X |
||
|
Yfmj |
|
|
|
местим с цен- |
|
|
|
тром масс |
|
|
Найдем проекцию момента импульса L на ось z, имеем
L i z = mi ri Ri ωz Cos αi = mi Ri2 ωz.
Просуммируем по всему телу (здесь уместно вспомнить о квантовом характере устройства материи и непрерывном континууме лишь как об удобной модели для математических расчетов с применением интегрирования )
L z = ∑ L iz = ωz ∑ mi Ri2 (ωz =cst)
Здесь Lz и ωz направлены вдоль оси z.
mi Ri2 = Ii
и называется моментом инерции материальной точки, а
I = ∑ mi Ri2 –
- моментом инерции тела в целом.
Размерность момента инерции [I] = кг м2. Окончательно имеем
Lz = ω I
53

Возвратимся к вращению относительно точки. В этом случае ω - мгновенное значение угловой скорости - ось вращения все время меняет свое положение в пространстве.
|
vi |
vi |
|
ω |
|
ω(t) |
|
ri |
|
|
O |
|
ri |
|
O |
vi ωi |
ri - |
- в произвольные моменты времени
Li = mi ri×vi = mi ri×(ω×ri) = mi [ω (ri ri) - ri (riω)] ( * )
Здесь применено соотношение известное в векторной алгебре под названием
“BAC - CAB” ("бац минус цаб")
a×(b×c) = b(a c) – c (a b),
которое проверяется прямым вычислением. Распишем на компоненты каждый из векторов в ( * )
ω = ωx i + ωy j + ωz k, riω = xiωx + yiωy + ziωz, ri= x i + y j + z k.
Тогда компоненты вектора момента импульса имеют вид
L xi = mi [ωxri2 - xi (xi ωx + yi ωy +zi ωz)],
L yi = mi[ωyri2 - yi (xi ωx + yi ωy + ziωz)],
L zi = mi[ωzri2 - zi (xi ωx + yi ωy + zi ωz)].
Просуммируем компоненты момента импульса, сгруппировав их предварительно с учетом постоянных по величине - ωx, y и z.
54

I xx |
I xy |
I xz |
L x = ωx ∑mi(ri2 - xi2) - ωy ∑ mi xi yi - ωz ∑ mi xi zi, |
||
I yx |
I yy |
I yz |
L y = - ωx ∑ mi xi yi + ωy ∑ mi (ri2 - yi2) - ωz∑mi yi zi, |
||
I zx |
I zy |
I zz |
L z = - ωx ∑ mi xi zi - ωy ∑ mi yi zi + ωz ∑ mi (ri2 - zi2).
Таким образом, вектор момента импульса не представим в виде совокупности трех компонент. Эти компоненты сами выражаются через другие величины - компоненты моментов инерции. Чтобы описать инвариантным образом по отношению к декартовой системе координат произвольное вращение твердого тела, запишем
L x = I xx ωx + I xy ωy L y = I yx ωx + I yy ωy L z = I zx ωx + I zy ωy
+I xz ωz
+I yz ωz
+I zz ωz.
Получилось симметричное выражение, для которого совокупность вида
|
|
|
|
I xx |
Ixy |
I xz |
I |
|
|
|
I yx |
Iyy |
Iyz |
|
|
|
||||
|
|
|
|
Izx |
Izy |
Izz |
называется тензором 2-го ранга. В этой классификации вектор - тензор первого ранга, а скаляр - тензор нулевого ранга. Тензор I называется тензором инерции. Чтобы вычислить весь тензор, необходимо вычислить все его компоненты. Рассмотрим одну из них
I xx = ∑ mi (ri2 - xi2)
От суммы можно перейти к интегралу, чтобы воспользоваться континуальным методом расчета
55
dI xx = dm (ri2 - xi2) = (ri2 - xi2) ρ (x,y,z) dV
здесь dm = ρdV, ρ-плотность тела, V- его объем; кроме того помним, что r2 - x2 = x2 + y2 + z2 - x2 = y2 + z2
I xx = ∫ ρ(x,y,z)(y2 + z2)dV.
V
Индексы при переходе к интегрированию можно опустить. Заметим, что в нашем тензоре
I xy = I yx = I1, I xz = I zx = I2, I zy = I yz
Такие тензоры называются симметричными. Для него можно рассчитывать меньшее количество компонентов
I xx |
I 1 |
I 2 |
I 1 |
I yy |
I 3 |
I 2 |
I 3 |
I zz |
Обратимся вновь к вращению относительно оси. При этом L z = ωI. Пусть L z ≡ L, а ω (ее направление) совпадает с L. (I – постоянная величина для каждого конкретного тела вращения)
M = L/dt, L = I ω
M = I dω/dt = I d2ϕ/dt2 = εI.
Момент инерции каждого тела известной формы рассчитывается и табулируется. Рассчитаем работу, мощность и кинетическую энергию тела при вращении относительно оси
dA = F ds = (ds = R dϕ) = F R dϕ = M dϕ
56
2
A = ∫ M dϕ 1
N = dA/dt = M dϕ/dt = Mω
K i = mivi2/2 = mi (ωRi)2/2 = (miRi2/2) ω2 = Iiω2/2;
K вращ = ∑ K i = Iω2/2 = Lω2/2 = L2/2I.
при этом К полн. = К пост. + К вращ..
§ 13 Неинерциальные системы отсчета
13.1 Центробежная сила инерции
|
|
|
F пружины = - m ω2R |
|
|
ω |
|
F ц .б. |
= mω2R (F цб = mv2/R = mωv = |
|
|
|
||
|
|
|
mω2R) |
|
R |
|
v |
Если |
положение тела в пространстве |
|
||||
|
|
описывать с помощью радиус-вектора r, |
||
|
|
|
||
r Fц.б. |
|
|
то необходимо прибегнуть к векторному |
|
|
|
|
произведению |
|
|
|
|
F ц.с. = -F ц.б. = mω×v (F = m а ц.б.) |
|
ωω
v
v
 r
r
w r
57

v = ω×r = - r×ω,
Fц .б. = m [ω×(r×ω)], где r×ω = -v
Fц .с. = m[ω×(ω×r)].
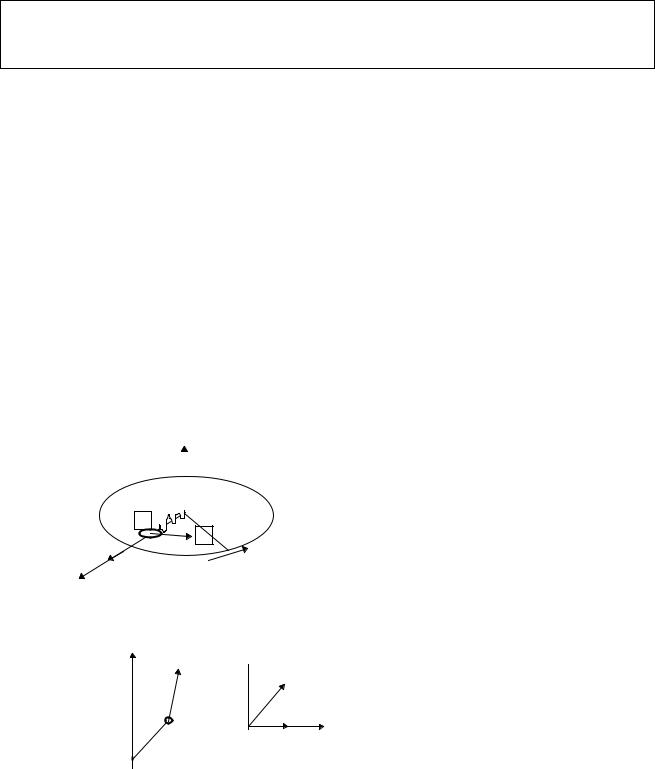
13.2 Сила Кориолиса
Рассмотрим вращающуюся систему отсчета, в которой и относительно которой тело движется с заданной скоростью. Такая система отсчета является неинерциальной, тогда
v′ - скорость тела относительно вращающейся системы отсчета
v - скорость тела относительно неподвижной системы отсчета
ω - угловая скорость вращения системы отсчета
Сила, действующая на тело относительно неподвижной системы отсчета должна рассчитываться следующим образом:
F инерции = m а n = mv2/R = m (v′ + ωR)2/R = mv′2/R + 2mv′ω + mω2R
F = mv′2/R - сила, действующая на тело относительно вращающейся системы отсчета
Fk = 2mv′ω - сила Кориолиса
58

ω = cst
F ц. б. = mω2R - центробежная сила (относительно неподвижной системы
отсчета)
Fr
v′
a инерциальной = a в + 2ω×v′ + ω×(ω×R)
Сократим на массу и получим выражение для ускорения относительно неподвижной - инерциальной системы отсчета.
a инерциальной - ускорение относительно инерциальной (неподвижной) системы отсчета
a в - ускорение во вращающейся (относительно вращающейся) системе отсчета
ω×v = ω×(ω×R) - центростремительное ускорение
2ω×v′ - ускорение Кориолиса
Для сил соответственно будет
F инерциальной = F в + F к + F ц.б.
Таким образом, сила Кориолиса реальна с точки зрения неподвижной (инерциальной) системы отсчета и возникает, то есть действует на тело в тех случаях, когда это тело находится в неинерциальной системе и ему сообщают некую скорость в этой неинерциальной системе отсчета.
59

§ 14 Гироскопы
Гироскопом называется массивное симметричное тело вращающееся вокруг оси симметрии. Здесь мы имеем дело с неинерциальной системой отсчета. Для такого тела момент импульса вычисляется по формуле:
L = Iω
ω O F1 |
O′′ |
L |
|
O′ M(F1F2) |
O′ |
O′′
F2 O
ОО - ось в плоскости чертежа, О′О′ - также ось в плоскости чертежа , О′′О′′ - ось перпендикулярная плоскости чертежа, F1, F2 - пара сил перпендикулярных плоскости чертежа.
1. В начале ось ОО неподвижна и тело вращается со скоростью ω около ОО,
L= Iω
2.Пусть ω′ - вынужденный поворот (с этой скоростью) оси ОО вокруг оси О′О′
под действием пары сил F1 и F2, причем так, что ω′« ω, и при этом поворот столь мал, что направление момента L и частоты ω будем считать совпадающими.
3.Анализируем, что произойдет с появлением пары сил F1,F2.
60