

Набор учебников PDF Хороший солдат / Физика / Физика. Механика
.pdf4.4. Момент импульса системы частиц... |
251 |
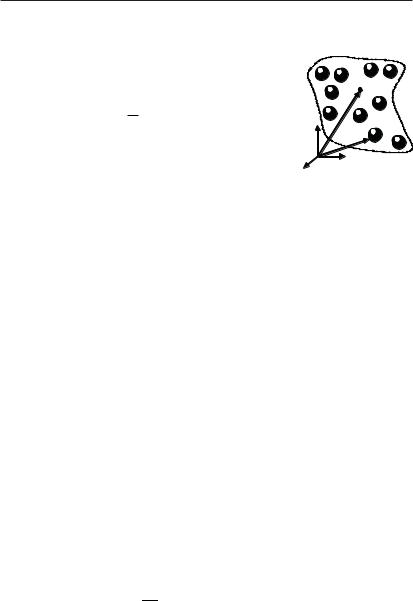
На примере простейшей системы частиц (рис.4.6) найдем ее уравнение моментов. Для каждой частицы системы, исходя из уравне-
ний (4.10) |
|
|
|
dLG G |
|
|
|
= M , |
|
dt |
|
|
|
|
относительно неподвижной точки О имеем |
||||||
|
|
dLG |
= |
G |
G |
|
|
|
1 |
M12внут + M1внеш , |
|||
|
|
dtG |
||||
|
|
|
|
G |
G |
|
|
|
dL |
|
= |
||
|
2 |
|
M |
21внут + M2внеш . |
||
|
|
dt |
|
|||
|
|
|
|
|
|
|
Определим производную по времени момента импульса системы
частиц. С учетом (4.20) и (4.19) получим |
|
|
||||||||||
|
G |
|
G G |
|
G |
|
G |
G |
G |
G |
G |
|
|
dL |
|
d(L1 + L2 ) |
|
dL1 |
|
dL2 |
|
||||
|
= |
= |
+ |
= |
M12внут |
+ M1внеш + M |
21внут + M2внеш = |
|||||
|
dt |
dt |
dt |
|
||||||||
|
|
|
|
dtG |
G |
|
|
|
||||
|
|
|
|
|
|
= M1внеш + M2внеш . |
|
|
||||
Обобщим этот результат на систему, состоящую из произвольно-
го числа частиц. |
|
|
|
|
|
|
|
|
dLG |
G |
внеш |
G |
внеш |
|
|
|
|
= ∑ Mi |
= M |
|
, |
(4.23) |
|
|
dt |
|
|||||
|
i |
|
|
|
|
|
|
т. е. производная по времени момента импульса системы частицы относительно неподвижной точки О равна векторной сумме моментов внешних сил, приложенных к частицам системы (сравните с выражением (4.10) для одной частицы). Уравнения (4.23) называются уравнением моментов системы частиц. Из (4.23) следует закон сохранения момен-
та импульса системы частиц: |
|
|
G |
|
G |
|
|
(4.24) |
|
если M внеш = 0 , то |
L = const, |
|||
или |
|
|
|
|
LG(t ) = LG |
(t |
2 |
) . |
|
1 |
|
|
|
|
Если векторная сумма моментов внешних сил, действующих на частицы системы относительно неподвижной точки, равна нулю, то момент импульса системы частиц остается постоянным (сравните с (4.11)). Если система изолирована (замкнута), т. е. на частицы системы не действуют внешние силы, то суммарный момент этих сил равен нулю и, следовательно, момент импульса изолированной системы частиц остается постоянным.
252 |
Глава 4. МОМЕНТ ИМПУЛЬСА. ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА |
Отметим, что во всех случаях, когда момент импульса системы частиц постоянен, моменты импульса отдельных частиц, составляющих систему, могут меняться со временем. Проектируя на ось z векторные уравнения (4.20,4.23) получим
Lz |
= ∑ Liz , |
(4.25) |
|
dLz |
i |
|
|
= M zвнеш . |
(4.26) |
||
dt |
|||
|
|
Здесь Lz – момент импульса системы частиц относительно неподвижной оси, а M zвнеш – сумма моментов внешних сил, действующих на систему частиц относительно неподвижной оси. Уравнение (4.26) называется уравнением моментов системы частиц относительно неподвижной оси. Из (4.26) следует закон сохранения проекции момента импульса системы частиц (сравните с (4.17)):
если M внеш = 0 , то |
L = const, |
(4.27) |
z |
z |
|
или
Lz (t1 ) = Lz (t2 ) .
Если алгебраическая сумма моментов внешних сил, действующих на все частицы системы относительно некоторой неподвижной оси равна нулю, то момент импульса системы частиц относительно этой оси остается постоянным.
Вопросы и задания для самопроверки
1.Докажите, что сумма всех внутренних сил системы частиц равна нулю.
2.Докажите, что сумма моментов внутренних сил равна нулю.
3.Запишите уравнение моментов импульса системы частиц.
4.Запишите уравнение моментов импульса системы частиц относительно оси.
5.Сформулируйте закон сохранения момента импульса системы частиц.
6.Как меняется со временем момент импульса замкнутой системы частиц?
7.Могут ли меняться со временем моменты импульса частиц, составляющих замкнутую систему?
4.5. Центр масс системы частиц |
|
|
|
|
|
253 |
4.5. ЦЕНТР МАСС СИСТЕМЫ ЧАСТИЦ |
|
|
||||
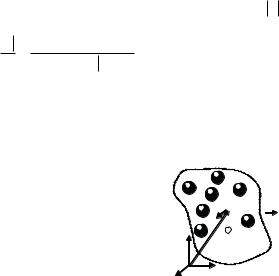
Центром инерции или центром масс систе- |
|
|
|
|||
мы частиц называется точка С, радиус-вектор |
|
|
С |
|||
которой rG определяется формулой |
|
|
||||
C |
|
|
|
|
|
|
rGC = 1 |
∑mi rGi |
, |
(4.28) |
|
G |
m i |
m |
i |
|
|
y |
||
где |
|
|
|
rC |
Gri |
|
|
|
|
O |
|
||
m = ∑mi |
|
(4.29) |
x |
|
||
G |
z |
|
||||
|
i |
– радиус-век- |
|
|
|
|
— масса системы частиц, а |
ri |
|
|
|
||
тор i частицы (рис. 4.7).
Декартовы координаты точки центра масс (или проекции радиус- |
||||||||||
вектора rG |
) в некоторой инерциальной системе отсчета имеют вид |
|||||||||
C |
|
1 |
|
|
1 |
|
|
1 |
|
|
|
xC = |
∑mi xi , |
yC = |
∑mi yi , |
zC = |
∑mi zi . |
(4.30) |
|||
|
m |
m |
m |
|||||||
|
|
i |
|
i |
|
i |
|
|||
Если число частиц системы и их масса не меняются со временем, |
|||||||||||||||||||
то скорость точки центра масс vG |
определяется как |
|
|
|
|||||||||||||||
|
G |
|
|
|
|
|
|
|
C |
drGi |
|
|
|
|
|
|
|
|
|
vGC = |
drC |
|
= |
d |
( |
1 |
∑mi rGi ) = |
1 |
∑mi |
= |
1 |
∑mi vGi |
= |
1 |
∑ pGi |
= |
1 |
pG ,(4.31) |
|
dt |
|
|
|
m |
|
|
m |
|
|||||||||||
|
|
|
dt m |
i |
i |
dt m |
i |
|
i |
|
m |
||||||||
где pG = ∑ pGi — импульс системы частиц. Следовательно, можно за- |
|||||||||||||||||||
писать |
i |
|
|
pG = mvG , |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.32) |
||||||
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
||
т. е. импульс произвольной системы частиц в любой инерциальной систе-
ме отсчета равен произведению массы системы на вектор скорости ее |
||||||||||||
центра масс. Определим ускорение центра масс системы как |
||||||||||||
|
|
|
|
|
G |
= |
dvGC |
|
|
|
||
|
|
|
|
|
a |
|
|
|
. |
|
(4.33) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
C |
|
|
dt |
|
|
|
|
Продифференцируем импульс системы pG (4.32) по времени с уче- |
||||||||||||
том определений vG |
(4.31) и aG |
(4.33) |
|
|
|
|||||||
|
C |
|
dmvGC |
C |
dvGC |
|
|
|
d 2 rGC |
|
||
|
dpG |
|
|
|
|
|
G |
|||||
|
|
|
= |
|
= m |
|
|
|
= m |
|
= ma . |
|
|
dt |
dt |
dt |
|
|
dt2 |
||||||
|
|
|
|
|
|
|
C |
|||||
ПриG рассмотрении закона сохранения импульса показано, что если p – импульс системы частиц, то
dpG = ∑ FGвнеш dt i i

254 |
Глава 4. МОМЕНТ ИМПУЛЬСА. ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА |
Тогда получаем уравнение движения центра масс
maGC = m d 2 rGC = FGвнеш . (4.34) dt2
Из этого уравнения видно, что центр масс произвольной системы движется так, как двигалась бы частица, масса которой равна сумме масс частиц системы, на которую действует сила, равная сумме внешних сил, приложенных к частицам системы. Отметим, что совершенно не важно, к каким частицам системы приложены внешние силы. Таким образом, движение центра масс описывает движение произвольной системы частиц в целом. Рассмотрим несколько примеров движения центра масс различных систем.
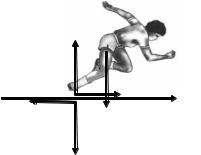
Прыжок кошки
Если кошка прыгает горизонтально (рис. 4.8), то ее центр масс перемещается так же, как перемещается камень (материальная точка) равной массы, брошенный горизонтально с той же высоты и с той же начальной скоростью. На кошку и камень в полете действует одна и та же внешняя сила тяжести (трением о воздух пренебре-
гаем). Поэтому |
G |
G |
|
G |
|
внеш |
|||
|
ma |
= F |
|
= mg . |
|
C |
|
|
|
За счет внутренних сил кошка может только менять положение частей своего тела (кувыркаться), но не может изменить положение своего центра масс. Так же как и камень, центр масс кошки движется в поле тяжести земли по параболе.
vG
y
парабола
G G
G
P mg
x
Рис. 4.8

256 |
Глава 4. МОМЕНТ ИМПУЛЬСА. ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА |
движению, больше по величине сил трения, направленных против движения.
Вопросы и задания для самопроверки
1.Дайте определение радиус-вектора и его координат, скорости и ускорения центра масс механической системы в произвольной инерциальной системе отсчета.
2.Дайте определение импульса системы частиц через скорость ее центра масс.
3.Объясните, почему барон Мюнхгаузен не мог вытащить сам себя за волосы из болота.
4.Объясните динамику ходьбы и бега человека, движения автомашины.
|
|
|
|
Примеры решения задач |
|
|
|||||||||
Задача 4.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gr1` |
Найти центр масс (т. С ) сис- |
|
|
|
|
|
Gr1 |
n |
||||||||
темы двух частиц с радиус-векто- |
|
|
|
|
|
GrC |
С |
||||||||
рами rG1 и rG2 и массами m1 и m2 |
|
|
|
y |
|
|
|
Gr2 |
o |
||||||
Дано: m1; m2; rG1 ; rG2 . |
|
|
|
|
z |
O |
x |
|
|
|
|||||
Найти: положение т. С. |
|
|
|
|
|
|
|
|
|||||||
Пусть т. С — неизвестный центр масс системы двух частиц. По |
|||||||||||||||
правилу сложения векторов получаем |
|
|
|
|
|
||||||||||
|
|
|
|
rG′ = rG |
− rG |
, |
|
rG′ = rG − rG . |
|
(1) |
|||||
|
|
|
|
1 |
1 |
|
C |
|
|
2 |
2 |
C |
|
|
|
Подставим в (1) выражение для rG |
(4.28) |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
G |
G |
− |
m1rG1 |
+ m2 rG2 |
= |
m1rG1 + m2 rG1 - m1rG1 |
− m2 rG2 |
= |
|||||||
r′ = r |
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
1 |
|
|
m1 |
+ m2 |
|
|
|
|
m1 + m2 |
|
|
|||
|
|
|
|
|
|
|
|
|
(2) |
||||||
|
|
|
|
m2 rG1 − m2 rG2 |
|
|
m2 |
G |
G |
|
|||||
|
|
|
= |
= |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
(r |
|
− r ) |
|
|||
|
|
|
|
m1 + m2 |
|
|
|
|
1 |
|
2 |
|
|
||
|
|
|
|
|
|
m1 + m2 |
|
|
|
|
|||||
G |
G |
− |
m1rG1 |
+ m2 rG2 |
= |
m1rG2 + m2 rG2 - m1rG1 |
− m2 rG2 |
= |
|||||||
r′ = r |
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
2 |
|
|
m1 |
+ m2 |
|
|
|
|
m1 + m2 |
|
|
|||
|
|
|
|
|
|
|
|
|
(3) |
||||||
|
|
|
|
m1rG2 − m1rG1 |
|
|
m1 |
G |
G |
|
|||||
|
|
|
= |
= |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
(r |
|
− r ). |
|
|||
|
|
|
|
m1 + m2 |
|
|
|
|
2 |
|
1 |
|
|
||
|
|
|
|
|
|
m1 + m2 |
|
|
|
|
|||||

 v
v

258 Глава 4. МОМЕНТ ИМПУЛЬСА. ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА
Следовательно, суммарный импульс системы частиц в Ц-систе-
ме (4.32) |
= mvG |
|
|
pG |
≡ 0. |
(4.36) |
|
Ц |
СЦ |
|
|
Уравнения моментов системы и уравнение моментов системы относительно оси (4.23, 4.26) в соответствии с принципом относительности Галилея инвариантны относительно преобразования Галилея, т. е. имеют одинаковый вид в любой инерциальной системе отсчета. Рассматривая моменты импульса и сил системы частиц относительно движущегося начала (точки) и движущейся оси, можно показать, что уравнения моментов и их проекций на ось остаются инвариантными (неизменными) и при переходе из инерциальной системы отсчета в Ц-систему, которая может быть как инерциальной, так и не-
инерциальной. Таким образом,Gимеют место равенства |
|
|||||
|
|
|
dL |
|
G |
|
|
|
|
Ц |
|
= MЦвнеш , |
(4.37) |
|
|
|
dt |
|||
|
|
|
|
|
|
|
|
|
dLЦz |
|
= MЦвнешz , |
(4.38) |
|
G |
|
|
dt |
|
||
|
|
|
|
|
||
G |
|
|
|
|||
где L |
, M внеш – момент импульса системы частиц и сумма моментов |
|||||
Ц |
Ц |
|
|
|
||
внешних сил, рассчитанных относительно центра масс системы, который в общем случае не является неподвижным.
4.7. АБСОЛЮТНО ТВЕРДОЕ ТЕЛО. РАВНОДЕЙСТВУЮЩАЯ СИЛ, ПРИЛОЖЕННЫХ К ТВЕРДОМУ ТЕЛУ.
РАВНОДЕЙСТВУЮЩАЯ СИЛ ТЯЖЕСТИ
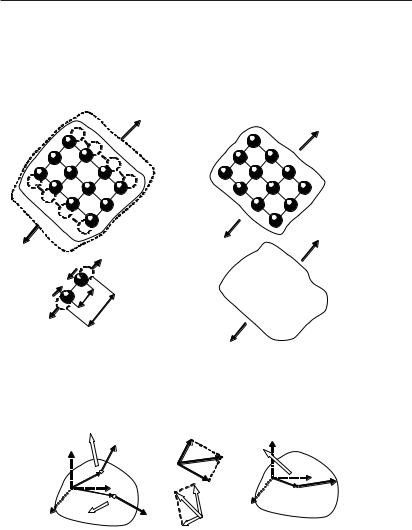
Рассмотрим частный случай — систему частиц с абсолютно жесткими связями. Модель такой системы — абсолютно твердое тело
(рис. 4.11). Следствием абсолютной твердости (жесткости) связей является неизменность расстояний между любыми двумя частицами и размеров всего тела при произвольном воздействии на систему (т. е. отсутствие деформаций, а значит и внутренних сил). Следовательно,
абсолютно твердое тело — модель макроскопического тела, размерами которого в рамках данной задачи нельзя пренебречь, но можно пренебречь изменениями этих размеров, т. е. деформациями.
При замене дискретной системы частиц на непрерывную неизменным остается расстояние между любыми двумя точками абсолютно
4.7. Абсолютно твердое тело. Равнодействующая сил... |
259 |
твердого тела. Далее вместо термина абсолютно твердое тело используется термин твердое тело. Если система частиц представляет собой одно твердое тело, то индекс «внеш» ни у сил, ни у их моментов указываться не будет, так как для одного твердого тела все силы внешние.
|
|
|
G |
|
|
|
Твердое тело |
|
|
|
|
|
внеш |
|
|
|
|
||
|
|
|
F1 |
|
|
|
|
FG1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дискретная |
|
|
|
|
|
|
|
|
|
система |
|
|
|
|
|
|
FG2 |
|
|
a 0 |
|
F1 |
G |
G |
|
|
|
|
G |
|
|
|
|
|
|
|
F1 |
|||
|
G внеш |
|
|
|
|
|
|
|
|
|
fG21 |
f12 |
f1 |
|
|
|
|
|
Непрерывная |
|
|
|
|
|
|
|
|
||
|
a1 |
|
|
|
|
|
|
система |
|
|
G |
a2 |
|
|
FG2 |
|
|
|
|
|
f 2 |
|
|
|
|
|
|
a 0 |
|
|
a a2 |
a1 – деформация |
|
|
|
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
Рис. 4.11 |
|
|
|
G |
Назовем равнодействующей сил, приложенных к твердому телу, силу |
||||||||
F |
равн (рис. 4.12): |
|
|
|
|
|
|
|
|
|
|
G |
FG2 |
|
G |
|
|
|
|
|
|
M 2 |
|
F2 |
FGравн |
G |
равн |
|
|
|
|
Gr2 |
|
G |
|
G |
M |
|
Gравн |
|
|
|
|
G |
|
||||
|
|
|
|
равн |
|
F |
|||
|
|
Gr1 |
G |
M |
|
F1 |
r |
|
|
|
|
G |
|
G |
|
|
|
||
|
|
|
M1 |
F1 |
G |
M 2 |
|
|
|
|
|
|
|
|
M1 |
|
|
|
|
|
|
|
|
|
|
Рис. 4.12 |
|
|
|
равную сумме сил, действующих на твердое тело |
|
|
|||||||
|
|
|
|
|
FGравн = ∑FGi , |
|
|
(4.39) |
|
i=1
 F
F