

Модуль вектора ускорения
![]() (1.12)
(1.12)
Вектор ускорения ![]() можно разложить на два вектора (рис.
1.5) .
можно разложить на два вектора (рис.
1.5) .
С оставляющая
ускорения, характеризующая изменение
мгновенной скорости по величине,
называетсякасательным (тангенциальным)
ускорением
оставляющая
ускорения, характеризующая изменение
мгновенной скорости по величине,
называетсякасательным (тангенциальным)
ускорением ![]() ,
совпадающим
,
совпадающим![]() с касательной в точке траектории,а
с касательной в точке траектории,а
Составляющая ускорения, направленная
к центру кривизны траектории перпендикулярно
![]() и характеризующая изменение вектора
скорости по направлению, называетсянормальным ускорением
и характеризующая изменение вектора
скорости по направлению, называетсянормальным ускорением ![]() ,
,
![]()
где R-радиус кривизны траектории,
Вектор полного ускорения
![]() , (1.12)
, (1.12)
а его модуль
![]() (1.13)
(1.13)
1.2. Уравнения движения
1.2.1 Равномерно, прямолинейно движение.
В зависимости от векторов скорости
![]() и ускорения
и ускорения![]() различают равномерное и ускоренное
движения.
различают равномерное и ускоренное
движения.
Движение называется равномерным и
прямолинейным, если точка движется по
прямой линии с постоянной скоростью
![]() .
.
Пусть в начальный момент времени t=0координата точких
= х0,
а скорость![]() постоянно и совпадает с направлением
движения (рис. 1.7).
постоянно и совпадает с направлением
движения (рис. 1.7).
З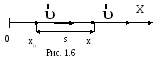 а
малый интервалdtперемещение
точки
а
малый интервалdtперемещение
точки
![]() ,
,
где – ![]() проекция
вектора скорости
проекция
вектора скорости![]() на ось ОХ,
на ось ОХ,
Проинтегрируем левую и правую часть последнего равенства в пределах изменения переменных x и t
![]() ,
,
![]() ,
(1.14)
,
(1.14)
![]() .
.
В случае когда вектор скорости
![]() не
совпадает с направлением движения
не
совпадает с направлением движения
![]() .
.
При прямолинейном равномерном движении пройденный точкой
![]() .
.
1.2.2 Ускоренное, прямолинейное движение
Движение
по прямолинейной траектории с постоянным
ускорением ![]() ,
совпадающим со скоростью
,
совпадающим со скоростью
![]() называется
равноускоренны.
называется
равноускоренны.
П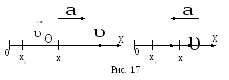 усть
в начальный момент времени координата
точкиx=х0, скорость
усть
в начальный момент времени координата
точкиx=х0, скорость![]() совпадает с направлением оси ОХ. За
время t пройденный точкой путь.
совпадает с направлением оси ОХ. За
время t пройденный точкой путь.
![]() (1.15)
(1.15)
где
![]() – модуль проекции вектора скорости на
ось OX находится из соотношения
– модуль проекции вектора скорости на
ось OX находится из соотношения![]() интегрированием его левой и правой
части в пределах изменения переменных
интегрированием его левой и правой
части в пределах изменения переменных![]() иt
иt

![]()
![]()
Подставим в соотношение (1.19) скорости
![]() и определи пройденный путь и координату
точки
и определи пройденный путь и координату
точки
![]() ,
,
![]() (1.16)
(1.16)
Если вектор ![]() противоположен скорости
противоположен скорости![]() ,
то движение будет
,
то движение будет![]() bи путь равнозамедленный
то проекция скорости,
bи путь равнозамедленный
то проекция скорости,![]() координата
точки пройденной точкой определяются
из соотношений:
координата
точки пройденной точкой определяются
из соотношений:
![]() .
.
![]() .
(1.17)
.
(1.17)
где.
Лекция 2
1.2.3 Кинематика вращательного и колебательного движения Вращательное движение
Р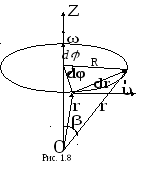 ассмотрим
движение м.т. по окружности радиусомRс постоянной линейной скоростью
ассмотрим
движение м.т. по окружности радиусомRс постоянной линейной скоростью![]() вокруг неподвижной осиZ(рис. 1.8).
вокруг неподвижной осиZ(рис. 1.8).
![]() Положение
точки определяется радиус-вектором
Положение
точки определяется радиус-вектором![]() ,
проведенным из начала координат. За
малый интервал времени
,
проведенным из начала координат. За
малый интервал времени![]() радиус-вектор
радиус-вектор![]() повернется на угол
повернется на угол![]() .
Направление поворота м.т. вокруг осиZзадается вектором
.
Направление поворота м.т. вокруг осиZзадается вектором![]() ,
который определяется правиломправого
винта: поступательное движение правого
винта и вектора
,
который определяется правиломправого
винта: поступательное движение правого
винта и вектора ![]() совпадают, если вращение точки и винта
совершается в одинаковом направлении.
Модуль вектора
совпадают, если вращение точки и винта
совершается в одинаковом направлении.
Модуль вектора![]() равен углу поворота за интервал времени
равен углу поворота за интервал времени![]() .
Линейное перемещение вектора
.
Линейное перемещение вектора![]() за времяdt
за времяdt
![]() (1.18)
(1.18)
![]()
Вектор линейной скорости
![]() ,
(1.19)
,
(1.19)
где
![]() – вектор угловой скорости.
– вектор угловой скорости.
Вектор угловой скорости
![]() совпадает с направлением вектора
совпадает с направлением вектора![]() .
.
Модуль вектора линейной скорости
![]() (1.20)
(1.20)
Где ![]() -
угол между векторами
-
угол между векторами![]() и
и![]()
Вектор линейного ускорения
![]()
![]() ,
(1.21)
,
(1.21)
где
![]() – вектор углового ускорения, – вектор
касательного ускорения,
– вектор углового ускорения, – вектор
касательного ускорения,
![]() –
вектор нормального ускорения.
–
вектор нормального ускорения.
Направление вектора углового ускорения
![]() совпадает с направлением вектора
, если угловая скорость возрастает,
и противоположно(
совпадает с направлением вектора
, если угловая скорость возрастает,
и противоположно(![]() ), если она уменьшается.
), если она уменьшается.
Модули векторов
![]() ,
,
![]() .
.
![]() . (1.22)
. (1.22)
Угловой путь м.т., движущейся по окружности за время dt
![]() .
.
Угловой путь
![]() точки
за интервал времени
точки
за интервал времени![]() tпри начальном угле
tпри начальном угле![]()

![]() .
.