kniga
.pdf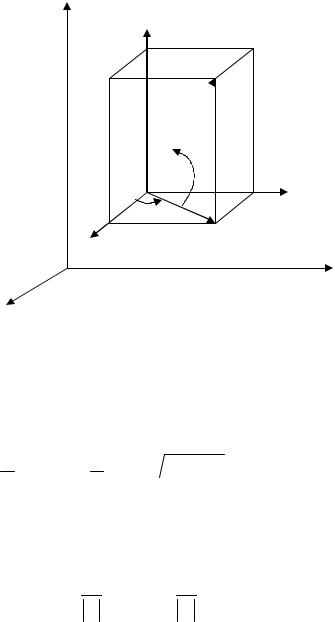
y
Vy |
|
|
|
|
|
V |
|
b |
|
|
|
O′ |
β |
a |
Vx |
|
|||
c α |
|
|
|
Vz |
|
|
x |
|
|
|
z
Рис. 11.11. Зміна просторової орієнтації системи координат
Виразимо матрицю A(V) через матриці елементарних поворотів.
•Перший поворот системи координат виконуємо відносно осі y проти годинникової стрілки на кут α, для якого
cosα = dc , sinα = da , d =  a2 + c2 ≠ 0, α [–1800, 1800].
a2 + c2 ≠ 0, α [–1800, 1800].
Це перетворення виконує матриця повороту Ry(–α).
•Друге перетворення – це поворот відносно нової осі x′ на кут β у від’ємному напрямку, для якого
cosβ = Vd , sinβ = Vb , β [–900, 900].
Це перетворення задається матрицею Rx(β).
Отже, матриця повороту системи координат для суміщення осі z із вектором V обчислюється за формулою
A(V) =Ry(–α) Rx(β).
Якщо d = 0 (тобто V||Oу ), то кут α невизначений і суміщення осі z із вектором V досягається не за два, а за одне обертання системи ко-
ординат відносно осі x матрицею
A(V) = Rx(sign(Vy)900).
Зауваження. Пряма підстановка
cosα = |
c |
, sinα = |
a |
, cosβ = |
|
d |
, sinβ = |
|
b |
||
d |
d |
|
V |
|
|
V |
|
||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||
223