

6.1 Приклад виконання завдання
Конічна
шестерня котиться без ковзання по
нерухомому конічному колесу (рис. 6.6).
Дано : ОС = 0,4 м;
![]() с-1;
с-1;
![]() с-2;
CD = 0,1 м;
с-2;
CD = 0,1 м;
![]() ;
;![]() .
.
Визначити кутову швидкість і кутове прискорення шестерні А, швидкість та прискорення точки D для заданого положення тіла А.
Розв‘язання:
Миттєва вісь обертання
![]() тіла А, що виконує сферичний рух, проходить
через точку О та точку дотику тіл А і В
(рис. 6.7)
тіла А, що виконує сферичний рух, проходить
через точку О та точку дотику тіл А і В
(рис. 6.7)
Швидкість
точки С при обертанні осі
![]() навколо осі OZ
навколо осі OZ
![]() (6.1)
(6.1)
Якщо
розглядати рух тіла А як обертальний
навколо миттєвої осі
![]() ,
то
,
то
![]() (6.2)
(6.2)
Виходячи з (6.1) та (6.2), маємо:
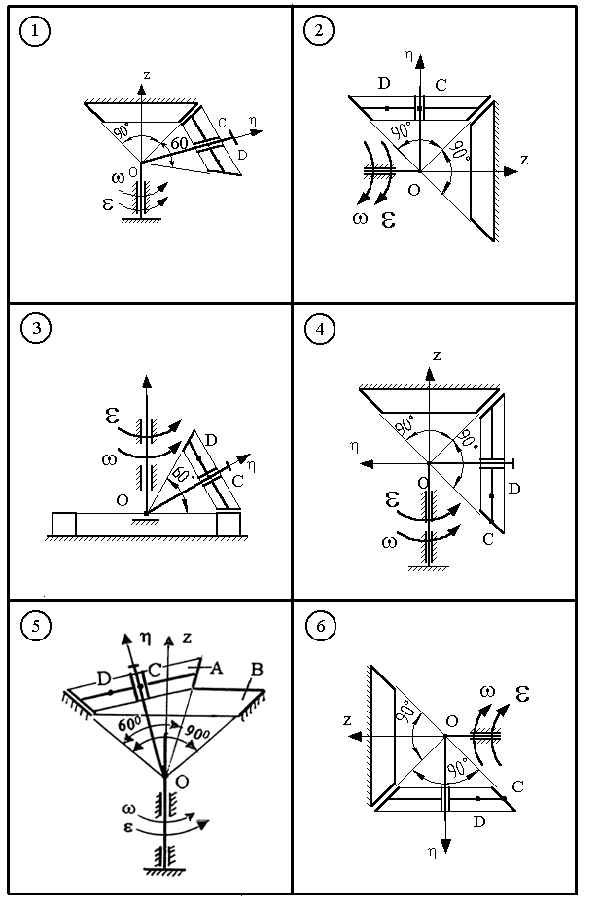
Рисунок 6.1
Р
1 А 1 М
2 3 1 M A 2 3 1 М А 2 3 1 М А 2 3 1 A M












































































 исунок
6.2
исунок
6.2
Р 2 1 3 М А A 3 1 2 M 1 3 2 М А


























![]()


















 исунок
6.3
исунок
6.3
Рисунок 6.4
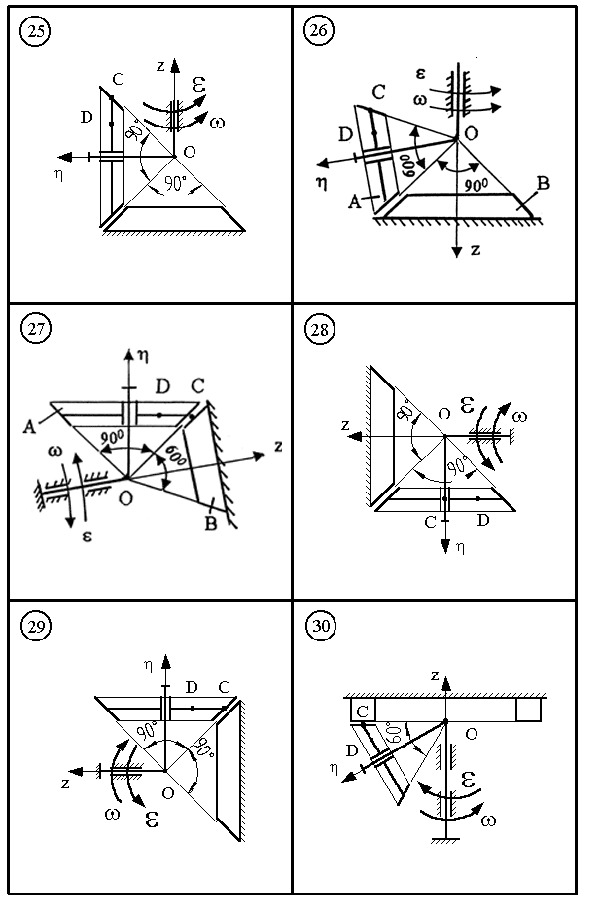
Рисунок 6.5
![]() .
.
Отже:
![]() ,
(6.3)
,
(6.3)
![]() .
.
Кутове прискорення тіла А
![]() ,
,
де
![]() - орт осі
- орт осі![]() ,
що змінює напрямок у просторі.
,
що змінює напрямок у просторі.
Отже,
![]() ,
(6.4)
,
(6.4)
де
![]() (рис.6.7).
(рис.6.7).
Тепер рівняння (6.4) набуває вигляду
![]() (6.5)
(6.5)
де
![]() ,
,![]()
Виходячи
з (6.3), знаходимо модуль кутового
прискорення
![]() тіла А
тіла А
![]()
![]() .
.
Вектор
![]() має
напрямок осі
має
напрямок осі![]() ,
а його модуль
,
а його модуль
![]()
Тепер рівняння (6.4) набуває вигляду
![]() (6.5)
(6.5)
де
![]() ,
,![]()
Виходячи
з (6.3), знаходимо модуль кутового
прискорення
![]() тіла А
тіла А
![]()
![]() .
.
Вектор
![]() має
напрямок осі
має
напрямок осі![]() ,
а його модуль
,
а його модуль
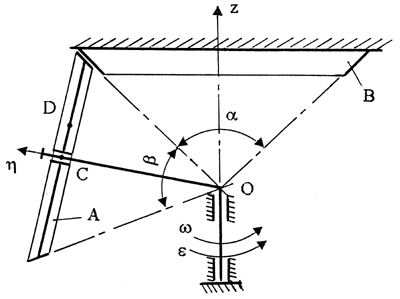
Рисунок 6.6
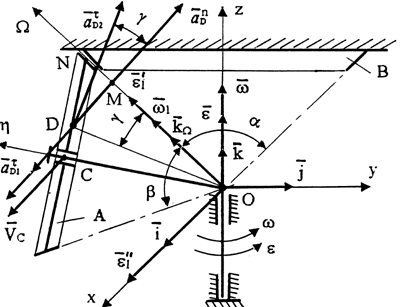
Рисунок 6.7
![]()
Оскільки
вектори
![]() та
та![]() взаємно перпендикулярні, тоді
взаємно перпендикулярні, тоді
![]() ,
,
![]() .
.
Швидкість
точки D знаходимо, враховуючи, що тіло
А обертається навколо миттєвої осі
![]() .
.
![]() .
.
Модуль цієї швидкості
![]() ,
,
де
![]() .
.
Прискорення
точки D дорівнює векторній сумі нормального
![]() і дотичного
і дотичного![]() прискорень:
прискорень:
![]() (6.6)
(6.6)
Нормальне прискорення
![]() (6.7)
(6.7)
спрямовано
перпендикулярно до миттєвої осі обертання
![]() тіла А від точки D до точки М (рис 6.7).
тіла А від точки D до точки М (рис 6.7).
Модуль нормального прискорення
![]()
Дотичне прискорення
![]()
або
![]() ,
(6.8)
,
(6.8)
де
![]() ,
,![]() .
.
Модулі складових дотичного прискорення точки D
![]() ,
,
![]() ,
,
де
![]() .
.
Оскільки
напрямки векторів
![]() та
та![]() збігаються, напрямки
збігаються, напрямки![]() і
і![]() також збігаються. Вектор
також збігаються. Вектор![]() розташований в площині YOZ і спрямований
перпендикулярно до OD в ту сторону звідки
поворот від вектора
розташований в площині YOZ і спрямований
перпендикулярно до OD в ту сторону звідки
поворот від вектора![]() до
вектора
до
вектора![]() видно
проти годинникової стрілки на кут 900
(рис. 6.7).
видно
проти годинникової стрілки на кут 900
(рис. 6.7).
Прискорення точки D (6.6) знаходимо як векторну суму складових (6.7) та (6.8):
![]()
Модуль прискорення точки D
![]() ,
,
![]() ,
,
де
![]()
![]() .
.
К.7 Знаходження швидкості та прискорення точки в складному русі
Умова завдання. На рис.7.1 – 7.5 по варіантах від 1 до 30 показа-но точку М, яка рухається по тілу, що виконує переміщення. Закони руху точки і тіла в залежності від часу задані функціями, які записа-ні біля рисунків, а числові значення коефіцієнтів приведені табли-цею 7.1 по варіантах. Визначити абсолютну швидкість та абсолютне прискорення точ- киМв складному русі для моменту часу, значення якого задано в таблиці 7.1 по варіантах. Для бажаючих більш детально дослідити процес складного руху точки побудувати графіки залежностейV = V(t)– абсолютної швид- кості від часу таa = a(t)– абсолютного прискорення від часу.
Таблиця 7.1
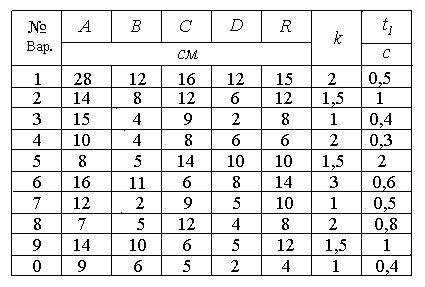
Примітка. Для зручності виконання завдання рівняння руху точ- ки Мі тіла потрібно записати із врахуванням значень коефіцієнтів таблиці 7.1.
Наприклад: для варіанта 15 біля рисунка вказано, що
S = A + k t2, = B(1-e-0,5t),
в таблиці 7.1 значення A, В, к задано по варіантах, нап-
риклад, по варіанту 4: A = 10см, В = 4см, к =2. То рівняння руху будуть:S = 10 + 2 t2 , = 8(1- e-0,5t).
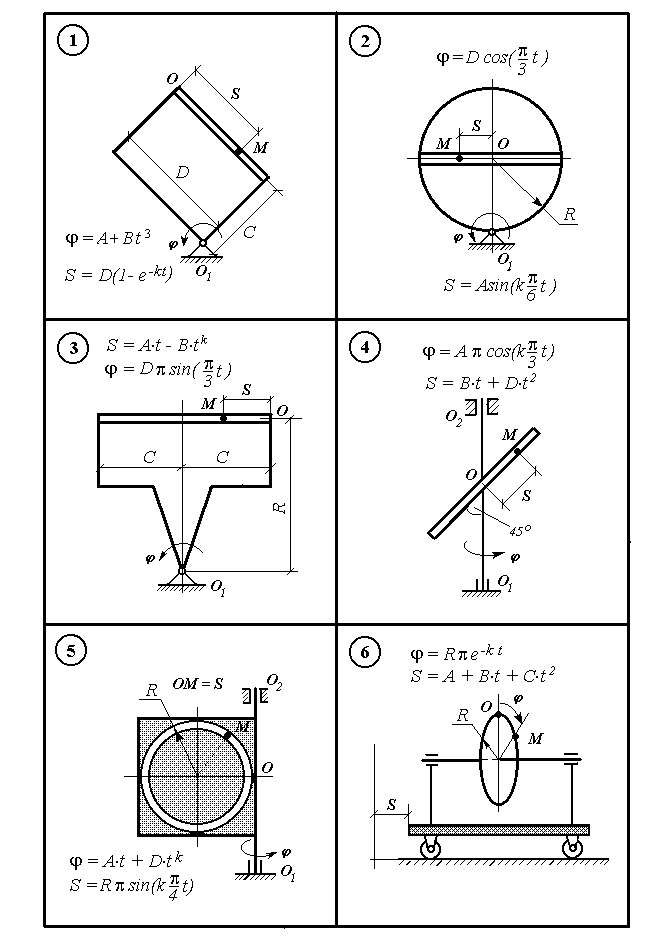
Рисунок 7.1
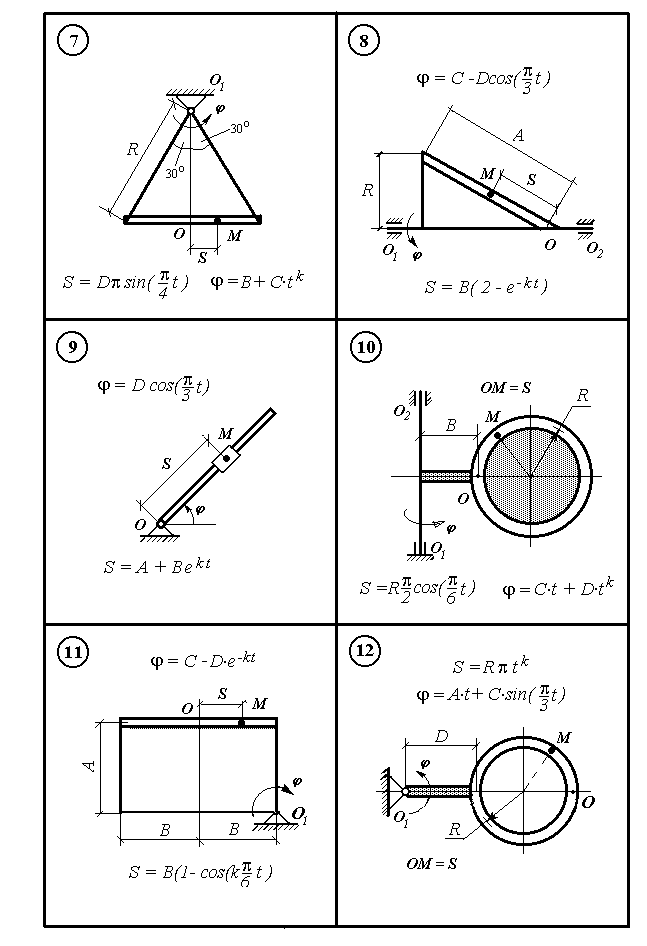
Рисунок 7.2
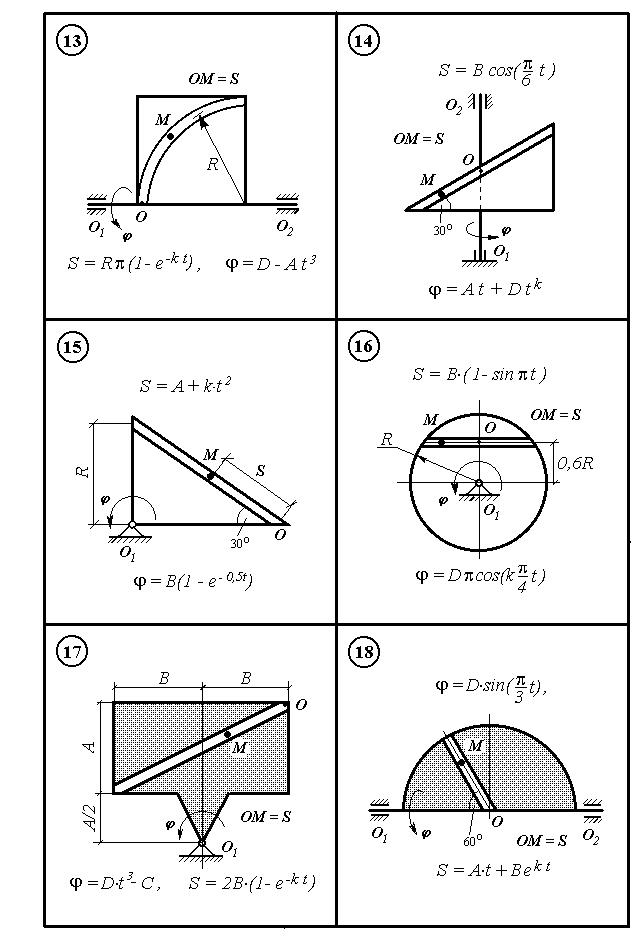
Рисунок 7.3
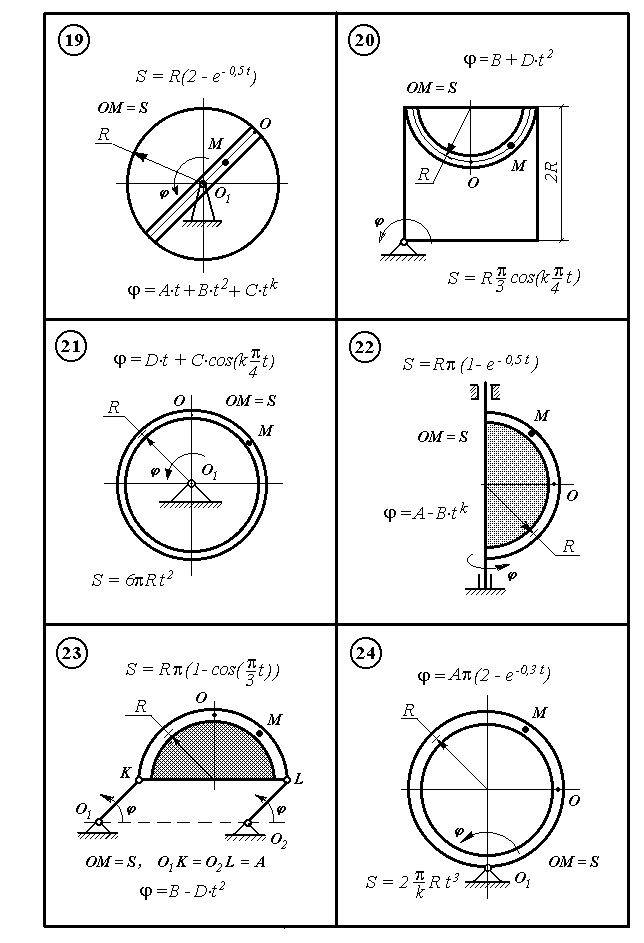
Рисунок 7.4
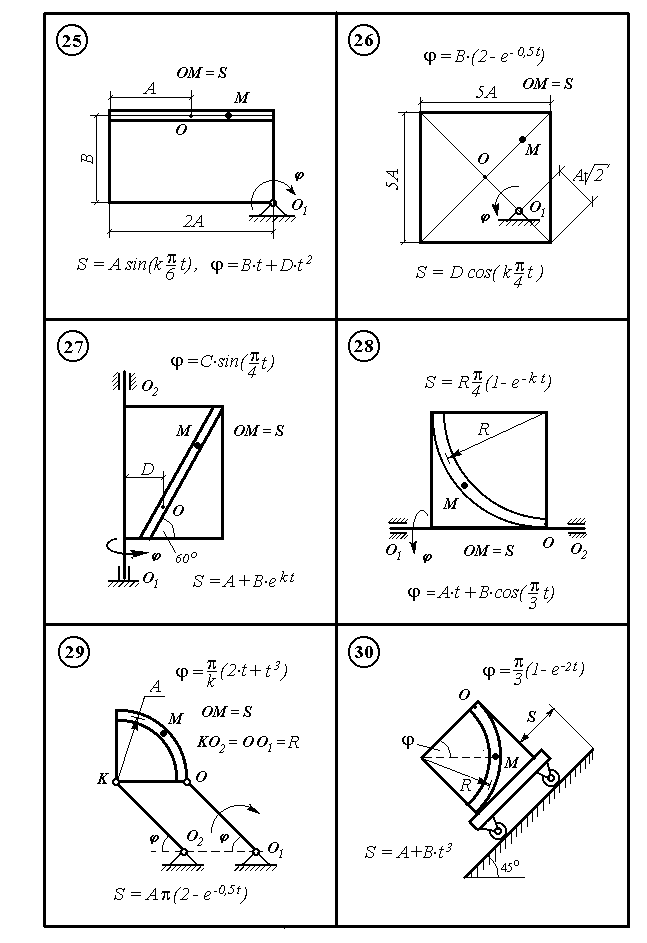
Рисунок 7.5