

5.1.2. Рототабельное планирование экспериментов
Существует другой способ центрального композиционного планирования второго порядка, позволяющий при помощи полученной модели описывать поверхность отклика с одинаковой точностью по всем направлениям, при этом остаточные дисперсии на одинаковых расстояниях от центра плана являются равными и наименьшими из возможных. Такое планирование получило название рототабельного. При центральном композиционном рототабельном планировании (ЦКРП) значение звездного плеча определяется по формуле
![]() ,
,
где
![]() – число опытов ядра плана.
– число опытов ядра плана.
В зависимости от выбора числа опытов в
центре плана обеспечивается либо так
называемая униформность, либоортогональностьплана. В первом
случае дисперсия предсказания сравнительно
мало изменяется или совсем не изменяется
в радиусе![]() =1
от центра плана. Для обеспечения
униформности плана должно соблюдаться
равенство
=1
от центра плана. Для обеспечения
униформности плана должно соблюдаться
равенство
![]() ,
,
в котором
![]() для числа факторов
для числа факторов![]() =2,3,4,5,6,7
равно соответственно 0,7844; 0,8385; 0,8705;
0,8918; 0,9070; 0,9185.
=2,3,4,5,6,7
равно соответственно 0,7844; 0,8385; 0,8705;
0,8918; 0,9070; 0,9185.
Чтобы рототабельный план был ортогональным, число опытов в центре плана должно соответствовать равенству
![]() ,
,
полученному
из предыдущего при
![]() =1.
Расчет по нему в некоторых случаях дают
дробные значения
=1.
Расчет по нему в некоторых случаях дают
дробные значения![]() ,
поэтому их приходится округлять до
ближайшего целого числа, нарушая при
этом условия униформности. Однако эти
отклонения оказываются настолько
незначительными, что ими можно пренебречь.
,
поэтому их приходится округлять до
ближайшего целого числа, нарушая при
этом условия униформности. Однако эти
отклонения оказываются настолько
незначительными, что ими можно пренебречь.
Для построения матриц центрального композиционного рототабельного униформ-планирования (ЦКРУП) рассчитывается и используется ряд характеристик.
Матрицы рототабельного униформ-планирования не ортогональны, поэтому параметры модели рассчитываются более сложным способом, чем при ортогональном планировании.
Так как при планировании экспериментов несколько опытов проводятся параллельно при основном уровне факторов, то их результаты позволяют оценить дисперсию воспроизводимости.
Адекватность модели проверяется при помощи критерия Фишера.
При использовании рототабельных
планов исключать из модели без пересчета
остальных можно только незначимые
оценки
![]() и
и
![]() .
Исключение любого из незначимых
параметров
.
Исключение любого из незначимых
параметров
![]() и
и![]() требует пересчета остальных в данной
группе.
требует пересчета остальных в данной
группе.
При реализации намеченных планированием экспериментов важно учитывать требования рандомизацииопытов, т.е. проведения опытов в однородных условиях, с одинаковой погрешностью в случайном порядке. Рандомизация проводится для того, чтобы изменения свойств материалов, характеристик оборудования, средств оснащения, установок и измерительных приборов вследствие их износа и разрушения, смены персонала и т.д. не вызывали искажающего влияния изучаемых факторов и временного «дрейфа» параметров. Поэтому рандомизируют опыты, проводя их в случайном порядке, в отличие от нумерации в матрице планирования.
5.2. Принципы построения экспертных систем и технология принятия статистических решений.
Экспертные системы(expertsystems). Имеют дело с задачами искусственного интеллекта на верхнем уровне, работая с символической информацией для получения выводов об окружающей среде и формирования соответствующих управленческих решений с учетом сложившейся или прогнозируемой ситуации. Они накапливают эвристические знания и, манипулируя ими, пытаются имитировать поведение эксперта .
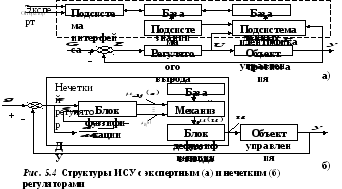
Экспертный регулятор – это объединение традиционного регулятора (контроллера) и экспертной системы, образующей верхний, супервизорный уровень управления и включающей следующие подсистемы.
Подсистема идентификации и прогнозаобеспечивает нахождение математической модели объекта по соотношению между его выходными и входными переменными в процессе функционирования.
База данныхсодержит непрерывно обновляемые предыдущие, текущие, прогнозные данные о характеристиках объекта и внешней среды, а также информацию о граничных значениях соответствующих параметров.
База знанийсодержит информацию о специфике работы объекта, целях, стратегии и алгоритмах управления, результаты идентификации и прогноза характеристик объекта.
Подсистема логического выводаосуществляет выбор рациональной для данной ситуации структуры и параметров регулятора, а также алгоритмов идентификации и прогноза.
Подсистема интерфейсаорганизует интерактивный режим по наполнению базы знаний с участием эксперта (режим обучения) и обеспечивает общение с пользователем-оператором.
Выполнение функций построения динамической модели объекта и его среды, а также поддержания контакта с внешним миром (датчиками, СУБД, регулятором) позволяет относить рассматриваемую экспертную систему к классу динамических (активных), или экспертных систем реального времени.
Нечеткие регуляторы(fuzzycontrollers) – типовая структура
ИСУ. Пусть объект управления является
одномерным, т.е. имеет один вход и один
выход. Ошибка управления![]() ,
разность задающего воздействия
,
разность задающего воздействия![]() и управляемого выхода объекта
и управляемого выхода объекта![]() подается на один из входов блока
фуззификации. На другой его вход подается
сигнал производной
подается на один из входов блока
фуззификации. На другой его вход подается
сигнал производной![]() ,
вычисленный дифференцирующим устройством
(ДУ).
,
вычисленный дифференцирующим устройством
(ДУ).
В результате получаем функции
принадлежности
![]() ,
,![]() и
и![]() ,
,![]() .
.
Здесь
![]() и
и![]() – значения (термы), принимаемые
соответственно лингвистическими
переменными «Ошибка управления»
и «Производная ошибки».
– значения (термы), принимаемые
соответственно лингвистическими
переменными «Ошибка управления»
и «Производная ошибки».
 В
базе знаний хранятся правила, левые
части которых содержат условия
относительно указанных значений
В
базе знаний хранятся правила, левые
части которых содержат условия
относительно указанных значений![]() и
и![]() лингвистических переменных, а правые
части – высказывания относительно
значений лингвистической переменной
«Приращение управляющего воздействия»
лингвистических переменных, а правые
части – высказывания относительно
значений лингвистической переменной
«Приращение управляющего воздействия»![]() для
для![]() -го
момента времени
-го
момента времени![]() .
В базе знаний относительно указанных
лингвистических переменных хранятся
правила типа: «если…и…, то…»,
реализация которых гарантирует выполнение
определенных заданных требований к
системе в части статики и динамики.
.
В базе знаний относительно указанных
лингвистических переменных хранятся
правила типа: «если…и…, то…»,
реализация которых гарантирует выполнение
определенных заданных требований к
системе в части статики и динамики.
В основе работы механизма логического
вывода используются методы
«Максимума-минимума» или «максимума
произведения», применение которых
позволяет получить функцию принадлежности
![]() лингвистической переменной «Приращение
управляющего воздействия» с учетом
конкретных значений сигналов
лингвистической переменной «Приращение
управляющего воздействия» с учетом
конкретных значений сигналов![]() и
и![]() – входов нечеткого регулятора.
– входов нечеткого регулятора.
Вопросы для самопроверки.
Что такое рототабельное планирование эксперимента?
Поясните порядок построения ортогонального плана второго порядка.
В чем заключается недостаток центрального композиционного ортогонального планирования (ЦКОП) второго порядка?
Что такое униформнасть плана и как она обеспечивается?
Что такое рандомизация опытов и как она осуществляется?
Поясните понятия экспертной системы и экспертного регулятора.
Что такое «нечеткий регулятор»?
Рекомендуемая литература.
Аверченков, В.И. Основы математического моделирования технических систем: учеб. пособие / В.И. Аверченков, В.П. Федоров., М.Л. Хейфец – Брянск: Изд-во БГТУ, 2004.
Вентцель, Е.С. Теория вероятностей / Е.С. Вентцель. – М.:Советское радио, 1972.
Таха, Х. Введение в исследование операций: В 2 кн. Кн.2 / Пер. с анг. – М.: Мир, 1985.
4. Фёдоров, В.П. Математическое моделирование в машиностроении:
учебное пособие. / В.П.Фёдоров – Брянск: БГТУ, 2013.= 112 С.