

9.1. Элементы нейросетевого моделирования процессов в технических объектах и системах.
Нейронные сети(НС)–раздел искусственного интеллекта, для обработки сигналов в котором используются явления, аналогичные явлениям, происходящим в нейронах живых организмов.
Их важнейшей особенностью является возможность параллельной обработки информации всеми звеньями. Громадное количество межнейронных связей позволяет значительно ускорить процесс обработки информации и сделать возможным преобразование сигналов в реальном времени. Большое число межнейронных связей обеспечивает устойчивость НС к ошибкам: в этом случае функции поврежденных связей берут на себя исправные линии и деятельность сети не претерпевает существенных возмущений.
НС способны к обучению и обобщению накопленных знаний, они обладают чертами искусственного интеллекта, в частности, в обобщении полученной информации и в показании хороших результатов на не использовавшихся в процессе обучения данных
Основу каждой нейросети составляют относительно простые, в большинстве случаев – однотипные, элементы (ячейки), имитирующие работу нейронов мозга. Под нейроном будет подразумеваться искусственный нейрон, то есть ячейка нейросети.
Он обладает группой синапсов –
однонаправленных входных связей,
соединенных с выходами других нейронов,
а также имеет аксон – выходную связь
данного нейрона. Каждый синапс
характеризуется величиной синаптическойсвязи или ее весом![]() .
Выход нейрона есть функция его состояния
– «функция активации», или
«передаточная функция» нейрона.
Одним из важных факторов не является
способ ее обучения. Выделяют два подхода:
обучение с учителем и обучение без
учителя.
.
Выход нейрона есть функция его состояния
– «функция активации», или
«передаточная функция» нейрона.
Одним из важных факторов не является
способ ее обучения. Выделяют два подхода:
обучение с учителем и обучение без
учителя.
Решение задач с использованием НС включает, как правило, три этапа (рис.).
В каждом из названных приложений НС
играет роль универсального
аппроксиматора функции от нескольких
переменных, реализуя нелинейную функцию![]() .
Именно к аппроксимационному представлению
могут быть сведены многие задачи
моделирования, идентификации и обработки
сигналов.
.
Именно к аппроксимационному представлению
могут быть сведены многие задачи
моделирования, идентификации и обработки
сигналов.
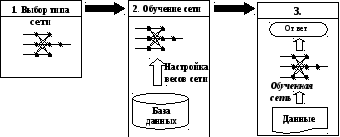
Рис. Этапы решения задачи с применением нейронных сетей
9.2. Генетические алгоритмы и их применение в моделировании технических систем.
Генетические алгоритмы (ГА)(geneticalgorithms) – большая группа методов адаптивного поиска и многопараметрической оптимизации, связанная принципами естественного отбора и генетики.
В общем случае при использовании ГА задачи оптимизации имеют следующую математическую формулировку:
найти такое значения варьируемых
параметров
![]() ,
которые минимизируют целевую функцию
,
которые минимизируют целевую функцию![]() при условии, что указанные параметры
при условии, что указанные параметры![]() удовлетворяют допустимой области
удовлетворяют допустимой области![]() ,
задание которой диктуется спецификой
решаемой задачи.
,
задание которой диктуется спецификой
решаемой задачи.
В качестве варьируемых параметров в
этих случаях могут быть числовые
коэффициенты регрессионной модели;
число базисных функций; порядок уравнений
регрессии; числовые коэффициенты
![]() ,
,![]() ,
,![]() функций принадлежности; число функций
принадлежности; число слоев и число
нейронов в каждом слое нейронной сети.
функций принадлежности; число функций
принадлежности; число слоев и число
нейронов в каждом слое нейронной сети.
При указанных варьируемых параметрах целевыми функциями могут быть: ошибка идентификации и прогноза в текущий или будущий момент времени; один из показателей качества процесса (функционал); ошибка обучения НС – рассогласование между выходными объекта и эталонной модели системы.
Наиболее общее определение: генетические алгоритмы(ГА) – этометоды случайного глобального поиска, копирующие механизмы естественной биологической эволюции.
Следует отметить, что существует много различных модификаций ГА. Здесь рассмотрим элементы простейшего его варианта – стандартного.
Стандартный ГА– методстохастической оптимизациидля задач дискретной оптимизации вида.
Максимизировать
![]() при условии, что
при условии, что![]() .
.
Здесь
![]() –функция пригодности(fitnessfunction);
–функция пригодности(fitnessfunction);![]() –
–![]() -мерный
двоичный вектор из дискретного множества
-мерный
двоичный вектор из дискретного множества![]() –хромосома (chromosome)
илидвоичная нить(string) длины
–хромосома (chromosome)
илидвоичная нить(string) длины![]() .
Множество
.
Множество![]() – множество вершин
– множество вершин![]() -
мерного гиперкуба с единичным ребром;
-
мерного гиперкуба с единичным ребром;![]() – множество действительных чисел.
– множество действительных чисел.
Главное отличие стандартного ГА от
традиционных методов оптимизации – на
каждом шаге ГА имеет дело сразу с
несколькими значениями вектора параметров
![]() ,
которые образуют популяцию (population)
хромосом. В начале процедуры поиска
создается начальная популяция, например,
из
,
которые образуют популяцию (population)
хромосом. В начале процедуры поиска
создается начальная популяция, например,
из![]() двоичных хромосом:
двоичных хромосом:![]() =
=![]()
![]()
![]() ,
каждая из которых содержит
,
каждая из которых содержит![]() битов. Такая популяция создается либо
случайным образом, либо с учетом
априорной информации об области
нахождения оптимума в множестве
битов. Такая популяция создается либо
случайным образом, либо с учетом
априорной информации об области
нахождения оптимума в множестве![]() .
.
Под двоичным вектором-хромосомой
![]() понимается двоичное кодирование
исходного варьируемого параметра
понимается двоичное кодирование
исходного варьируемого параметра![]() ,
физический смысл которого определяется
задачей. Длина хромосомы
,
физический смысл которого определяется
задачей. Длина хромосомы![]() (число битов) при таком кодировании
зависит от требуемой точности нахождения
оптимума параметра
(число битов) при таком кодировании
зависит от требуемой точности нахождения
оптимума параметра![]() и должна удовлетворять условию
и должна удовлетворять условию
![]()
![]()
![]() ,
,
где
![]() ,
,![]() – предельные значения параметра
– предельные значения параметра![]() ;
;![]() – заданная погрешность определения
его оптимального значения.
– заданная погрешность определения
его оптимального значения.
Число членов
![]() в популяции влияет на широту фронта
поиска и задается эмпирически.
в популяции влияет на широту фронта
поиска и задается эмпирически.
Вычисление последующих популяций
![]() ,
,![]() и т.д. на базе
и т.д. на базе![]() осуществляется путем применения трех
генетических операторов:отбора(selection),кроссинговера(crossingover) имутации(mutation).
осуществляется путем применения трех
генетических операторов:отбора(selection),кроссинговера(crossingover) имутации(mutation).
Отборв стандартном ГА реализуется
методом «колеса рулетки», при котором
хромосомы-кандидаты из![]() -го
поколения
-го
поколения![]() выбираются для выживания в следующем,
выбираются для выживания в следующем,![]() -м
поколении
-м
поколении![]() путем использования колеса рулетки.
Каждая хромосома в популяции представлена
на колесе в виде сектора с шириной,
пропорциональной функции пригодности
путем использования колеса рулетки.
Каждая хромосома в популяции представлена
на колесе в виде сектора с шириной,
пропорциональной функции пригодности![]() .
Для отбора
.
Для отбора![]() хромосом колесо рулетки вращают
хромосом колесо рулетки вращают![]() раз. В результате по завершении каждого
вращения выделяется одна из хромосом
раз. В результате по завершении каждого
вращения выделяется одна из хромосом![]() ,
которые принимаются в качестве кандидатов
в следующем поколении. Перед их
копированием в новую популяцию они
должны подвергнуться кроссинговеру и
мутации.
,
которые принимаются в качестве кандидатов
в следующем поколении. Перед их
копированием в новую популяцию они
должны подвергнуться кроссинговеру и
мутации.
Оператор кроссинговера(скрещивания) применяется к паре хромосом
из![]() (пусть
(пусть![]() -четное),
прошедших отбор.
-четное),
прошедших отбор.![]() – назначаемая вероятность выполнения
кроссинговера. Далее для случайно
выбранной пары хромосом определяется
случайное число
– назначаемая вероятность выполнения
кроссинговера. Далее для случайно
выбранной пары хромосом определяется
случайное число![]()
![]()
![]() (место или сайт кроссинговера), и затем
биты из двух выбранных хромосом меняются
местами после
(место или сайт кроссинговера), и затем
биты из двух выбранных хромосом меняются
местами после![]() -го
бита с вероятностью
-го
бита с вероятностью![]() .
Процесс повторяется до момента, когда
популяция
.
Процесс повторяется до момента, когда
популяция![]() не окажется пустой.
не окажется пустой.
Оператор мутациисостоит в
случайном изменении (на противоположное)
значения каждого бита гена с вероятностью![]() .
Самым легким способом определения
изменяемых бит (если это необходимо) –
выбор независимого случайного числа
.
Самым легким способом определения
изменяемых бит (если это необходимо) –
выбор независимого случайного числа![]() для каждого бита хромосомы. Если
для каждого бита хромосомы. Если![]() ,
то
,
то![]() -й
бит следует изменить, в противном случае
он сохраняется.
-й
бит следует изменить, в противном случае
он сохраняется.
После мутации хромосомы-кандидаты
копируются в новую популяцию хромосом
![]() и весь процесс повторяется с вычислением
функции пригодности для каждой хромосомы
и применением операторов отбора,
кроссинговера и мутации (рис. 5.8.) [4].
и весь процесс повторяется с вычислением
функции пригодности для каждой хромосомы
и применением операторов отбора,
кроссинговера и мутации (рис. 5.8.) [4].
О тбор
методом«колеса рулетки»позволяет претендовать на выживание
хромосомам с пригодностью выше среднего.
Детерминированный подход по принципу
выбора хромосом с наибольшей пригодностью
не применяется в соответствии с
допущениями генетического поиска,
согласно которым даже хромосомы с низкой
пригодностью могут содержать полезную
информацию.
тбор
методом«колеса рулетки»позволяет претендовать на выживание
хромосомам с пригодностью выше среднего.
Детерминированный подход по принципу
выбора хромосом с наибольшей пригодностью
не применяется в соответствии с
допущениями генетического поиска,
согласно которым даже хромосомы с низкой
пригодностью могут содержать полезную
информацию.
Наиболее критическим из перечисленных
трех является оператор кроссинговера,
так как он отвечает за смешивание
информации хромосом поколение популяции,
а от этого зависит глобальность получаемых
результатов. Установлено эмпирически,
что
![]() .
.
Операторы отбора и кроссинговера
используются для улучшения структуры
хромосом. Цель оператора мутации –
диверсификация, т.е. повышение разнообразия
поиска и введение новых хромосом в
популяцию для большей полноты исследования
пространства поиска. Мутация инициирует
разнообразие в популяции, позволяя
просматривать больше точек в пространстве
поиска и преодолевать локальные
эксперименты в ходе поиска. Частое
применение мутации приводит к разрушению
хромосом с высокой приспособленностью
в популяции, что сказывается на сходимости
решения. Поэтому применение мутации
обычно осуществляется с малой вероятностью:
![]() .
.
В последнее время область применения ГА значительно расширилась. Данные методы оказываются эффективными при решении следующих задач :
идентификация сложных динамических объектов;
выбор оптимальной конфигурации многоагентных
робототехнических систем;
синтез оптимальных алгоритмов управления многозвенными
роботами-манипуляторами;
оптимальное управление стыковкой космических аппаратов;
планирование маршрутов движения транспортных средств в
условиях препятствий;
структурный синтез проектных решений, синтез расписаний
и многих других.
Таким образом, применение ГА охватывает не только класс традиционных задач оптимизации, но и быстро распространяется на задачи управления сложными динамическими объектами в условиях неопределенности. Нельзя не отметить, что область применения ГА существенно расширилась. Одним из таких расширений является генетическое программирование (ГП), под которым понимается применение генетической модели обучения в пространстве программ. В этом случае в качестве индивидуумов, составляющих популяцию, выступают уже не указанные выше достаточно простые линейные структуры – хромосомы, а компьютерные программы, которые, будучи исполненными, представляют собой кандидатов на решение поставленной задачи.
Вопросы для самопроверки
Нейронные сети: их место в моделировании технологических систем
Роль и место генетических алгоритмов в математическом моделировании технологических систем.
Какую математическую формулировку имеют задачи оптимизации при использовании генетических алгоритмов?
В чем заключается суть стандартного генетического алгоритма для задач дискретной оптимизации?
В чем заключается главное отличие генетического алгоритма от традиционных методов оптимизации?
Что такое двоичный вектор-хромосома?
В чем заключается отбор методом «колеса рулетки»?
Дайте определение операторов «кроссинговер» и «мутация».
Для каких задач методы оптимизации с использованием генетических алгоритмов являются наиболее эффективными?
Рекомендуемая литература
Аверченков, В.И. Основы математического моделирования технических систем: учеб. пособие / В.И. Аверченков, В.П. Федоров., М.Л. Хейфец – Брянск: Изд-во БГТУ, 2004.
2. Фёдоров, В.П. Математическое моделирование в машиностроении:
учебное пособие. / В.П.Фёдоров – Брянск: БГТУ, 2013.= 112 С.