

1.1.2. Классификация телемеханических систем
В процессе управления производственными работами возникает необходимость передачи информации о ходе выполнения работ, а также команды управления. Системы автоматики необходимы для автоматизации различных процессов, в то время как телемеханические системы предназначены для передачи и обработки таких сообщений. На железнодорожном транспорте к телемеханическим системам предъявляются особые требования, так они непосредственно влияют на безопасность движения поездов.
Телемеханика – это отрасль науки и техники, охватывающая теорию и технические средства преобразования и передачи информации для управления техническими системами на значительное расстояние.
На железнодорожном транспорте системы телемеханики получили широкое распространение при централизованном управлении объектами, расположенными на значительном расстоянии от центра управления. Телемеханические системы подразделяются на несколько основных групп в зависимости от выполняемых функций.
Системы телеуправления (ТУ) предназначены для передачи управляющих команд от пункта управления непосредственно к управляемым объектам.
Системы телесигнализации (ТС) предназначены для передачи информации о состоянии контролируемого объекта к пункту управления.
Системы телеизмерения (ТИ) предназначены для контроля значений различных показаний объекта управления на расстоянии.
Системы телерегулирования (ТР) предназначены для передачи сигналов установки от пункта управления к управляемому объекту. Данные системы используются для передачи команд на объекты, имеющие множество различных состояний.
Также существуют комбинированные системы, которые объединяют несколько ранее названных систем.
Все системы телемеханики являются системами передачи информации. Эти системы содержат совокупность технических средств передачи информации от источника к исполнительному устройству (рис. 1.2). Основными элементами такой системы являются:
источник сообщения (ИС);
кодирующее устройство (КУ) формирует из сообщения «А» сигнал;
передатчик-модулятор (ПМ) нужен для преобразования сигнала в вид, удобный для передачи по линии связи;
линия связи (ЛС) – физическая среда, по которой передаются сигналы;
приёмник-демодулятор (ПД) – преобразует принятый сигнал в первоначальный вид;
декодирующее устройство (ДУ), которое формирует из полученного сигнала первоначальное сообщение;
формирователь сигнала реализации (ФСР) необходим для формирования сигнала управления в зависимости от принятого сигнала;
исполнительное устройство.

Рис. 1.2. Структурная схема простейшей системы передачи информации
Система телемеханики нужна для передачи сообщения от источника к получателю, если сигнал переданный принят без искажений и полностью соответствует первому, то задача телемеханической системы является выполненной.
1.1.3. Принцип построения систем телеуправления и телесигнализации
Управление удаленными объектами осуществляется из единого пункта управления (ПУ) оператором. На этом пункте находится диспетчерский комплект приемно-передающей аппаратуры, а непосредственно около управляемых или контролируемых объектов размещаются комплекты контролируемых пунктов (КП).
Управляемые или контролируемые объекты территориально могут быть:
размещены в одном месте – сосредоточенные объекты (рис. 1.3, а);
разбросаны небольшими группами на значительные расстояния друг от друга – рассредоточенные объекты (рис. 1.3, б).
При сосредоточенных объектах управления или контроля на все объекты устанавливают общий комплект (КП), а при рассредоточенных около каждой группы (или отдельных объектов управления или контроля) устанавливается свой комплект аппаратуры.
|
|
|
|

Рис. 1.3. Виды распределения объектов управления
Системы телеуправления (ТУ) самостоятельно применяют очень редко, чаще всего их дополняют устройствами телесигнализации (ТС). Такие системы называются системами «ТУ – ТС». Для них характерна передача ограниченного числа дискретных команд или извещений. При их передаче используются следующие методы избирания: прямое, кодовое и групповое.
Прямое избирание характеризуется тем, что содержание каждого сообщения (команды) определяется только одним импульсом определенного качества. Принцип прямого избирания может быть пояснен при помощи схемы рис. 1.4.
|
|
|
|
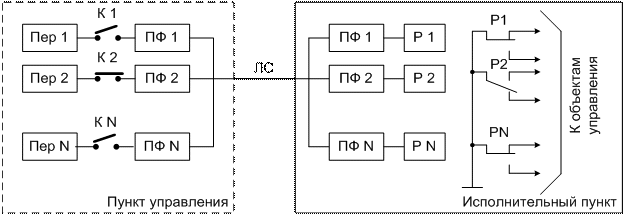
Рис. 1.4. Система с прямым избиранием
Если требуется управлять N объектами и при этом каждый объект может быть включен либо отключен. То для этого необходимо передать N*2 различных команд: «Включить 1-й объект»; «Отключить 1-й объект»; «Включить 2-й объект»; «Отключить 2-й объект» и т. д.
На передающей стороне устанавливаются передатчики (Пер1… Пер N), которые вырабатывают различные колебания (отличающиеся по частоте). Если сигнал отсутствует (Пер 1, Пер N), то это означает посылку «0», если сигнал посылается (Пер 2) – «1». Колебания передаются по линии связи (ЛС). Разделение посылок осуществляется на приемном конце полосовыми фильтрами (ПФ1 … ПФ N), на выходе которых подключаются исполнительные реле (Р 1 … Р N).
Важное свойство систем с прямым избиранием – возможность одновременной передачи в них одной, двух или всех возможных команд, так как каждая команда посылается независимо – по своему каналу.
Кодовое избирание характеризуется тем, что каждая: команда передается определенной кодовой комбинацией.
На передающем конце системы с кодовым избиранием устанавливают шифратор, а на приемном – дешифратор. При нажатии одной из кнопок управления (К1 … К5) сигнал поступает на шифратор (Ш), который преобразует этот сигнал в определенную комбинацию кода. Через линию связи (ЛС) эта комбинация поступает на фильтры приемного комплекта (ПФ), которые выделяют импульсы. Сигналы на их выходах выпрямляются выпрямителями (В1, В2, ВЗ) и в виде кода комбинаций импульсов поступает на дешифратор (Д), который обеспечивает при каждой фиксированной комбинации входных импульсов возбуждение только одного исполнительного реле (Р1 … Р5) на выходе.
Групповой метод избирания применяется чаще всего если необходимо управлять рассредоточенными системами телемеханики и когда имеется значительное количество объектов управления. При таком способе все кодовые комбинации разбивают на группы. Первая группа элементов сообщения несет информацию о номере контрольного пункта, вторая о виде команды управления (включить/выключить), а третья – номер объекта управления. Принцип построения системы телеуправления с групповым методом избирания поясняет рис. 1.6.
|
|
|
|
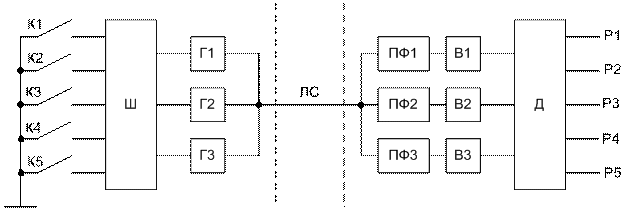
Рис. 1.5. Функциональная схема системы ТУ с кодовым избиранием
|
|
|
|
Рис. 1.6. Структура системы ТУ с групповым избиранием
На пульте управления передаваемое сообщение ТУ кодируется и передается в линию связи в виде серии импульсов, обладающих определенными признаками. На контролируемом пункте импульсы воспринимаются специальными устройствами, декодируются и приводят в действие управляемый объект.
Для передачи команд ТУ аппаратура пункта управления содержит следующие функциональные узлы:
пусковой узел П, воспринимающий команды с пульта управления и запускающий кодирующие устройства;
генератор Г, вырабатывающий импульсы тока для передачи по линии связи;
кодер К для кодирования сообщения (придает импульсам тока определенные качества);
распределитель Р, осуществляющий разделение сигналов;
линейный узел Л, служащий для согласования кодирующих устройств с линией связи.
Аппаратура контрольного пункта для приема команд ТУ содержит:
линейный узел Л, воспринимающий импульсы тока из линии связи и фиксирующий их качество;
декодер Д, осуществляющий декодирование принятого кодового сообщения, т.е. определяющий объект, которому передается приказ, и формирующий сигнал управления этим объектом;
защитный узел 3, предназначенный для обнаружения или исправления шибок при передаче сообщения по каналу связи.