

8.8. История робототехники
Развитие электротехники, вычислительной техники, машиностроения привели к появлению принципиально новых машин для автоматизированного производства – роботов, лазеров, роторных линий и т.д.
Робот (чеш. robot – подневольный труд – машины, которая частично или полностью выполняет функции человека (иногда животных) при взаимодействии с окружающим миром. Термин «робот» был впервые введен чешским писателем К.Чапеком (1890-1938) в драме «R.U.R» (Россумские универсальные роботы) о восстании роботов, т.е. механических людей, написанный им в 1920 г.
В первой половине XVIII в. французский механик Жак де Вокансон создал механического флейтиста и свирельщика, который правой рукой бил в бубен, а левой играл на свирели и прищелкивал языком. Особенно прославились своими механическими куклами швейцарские часовые мастера Пьер (отец) и Анри (сын) Дро.
Пьер Дро вначале начал пристраивать к часам разные дополнительные механизмы, так к маятниковым часам приделал пастушка с собачкой. Когда часовая стрелка подходила к какому-либо часу, пастушок подносил ко рту флейту и свистел столько раз, сколько должно пробить часов. У ног пастушка лежала собачка, которая охраняла корзину с яблоками. Стоило кому-нибудь дотронуться до фруктов, то лай собачки прекращался. Эти часы были проданы после демонстрации в Мадриде королю Испании Фердинанду II. В 1770 г. был изготовлен первый механический человек «пишущий мальчик», который был ростом с пятилетнего ребенка. Он сидел на скамейке перед столиком и в правой руке держал гусиное перо, которое макал в чернильницу и писал разные слова. Во время письма мальчик двигал головой. Окончив работу, он посыпал лист бумаги песком для высушивания чернил, а потом стряхивал его. Весь приводной механизм размещался внутри мальчика.
Затем Пьер Дро вместе с сыном изготовили рисующего мальчика и музыкантшу, которая играла на фисгармонии, ударяя пальцами по клавишам. Перед началом игры музыкантша осматривала ноты и делала рукой некоторые предварительные движения. Во время игры она поворачивала голову и глаза, как бы следя за положением рук. Ее грудь подымалась и опускалась, как будто она дышала. Окончив игру, музыкантша поворачивала голову, благодаря слушателей за одобрение.
Свои творения Дро продемонстрировал в 1774 г. на выставке в Париже. Движение трех механических людей были так естественны, что зрители считали их живыми людьми. Только после показа сложного механизма со стороны сцены, зрители убеждались в том, что перед ними произведения техники, а не живые вещества. Эти произведения сохранились до наших дней и хранятся в музее изобразительных искусств города Невшателя в Швейцарии.
Источником движения всех трех фигур является часовой механизм с заводной пружиной. Эти механизмы стали называть андронами в честь молодого талантливого изобретателя механических людей Андри Дро.
Вершиной строительства механических кукол был «Храм очарований», открытый 150 лет назад в Петербурге изобретателем А.М. Гамулецким. Над площадкой лестницы парил женская позолоченная фигура, которая удерживалась магнитными силами. В руке она держала волторну, а как только гости ступали на площадку, подносила ее к губам и начинала играть, шевеля пальцами, как настоящий музыкант. У дверей кабинета гостей встречали механические слуги, кланяясь. Дом был полон механических животных: хлопал крыльями петух, лаяла собака, выгибала спину и мяукала кошка, ползала и шипела змея.
В 1893 г. был построен андроид, который двигался со скоростью 14км/ч за счет паровой машины, спрятанной в корпусе, а дымовая труба была замаскирована под сигару.
На всех выставках технического творчества в 60-70 годах XX в. обязательно демонстрировались роботы, которые здоровались с посетителями, двигались по выставке, выполняли несложные движения. В устройстве роботов использовались электродвигатели, магнитофоны, различные датчики, гидравлические усилители и другие современные приборы и механизмы.
Постепенно от роботов-игрушек перешли к созданию роботов-тружеников, которые способны заменить человека на тяжелых монотонных работах у грохочущих прессов, огнедышащих печей, на запыленных складах цемента.
Промышленный робот, согласно определению, данному на XI Международном симпозиуме в Токио, представляет собой многофункциональный манипулятор (от лат. maniputas – пригорошня, горсть; manys – рука), с возможность многократного программирования, предназначенный для перемещения и обработки по программам материалов, деталей, инструментов, или специальных узлов с целью выполнения различных задач.
Промышленные роботы имеют «руки», обладающие несколькими степенями свободы, захватывающие устройства или специальные транспортирующие приспособления. Они несут функции, аналогичные функциям человеческих рук, и могут совершать два или более движений, таких, как поворот, выдвижение, вертикальное или горизонтальное перемещение, качание и др., для выполнения операций, связанных с пространственными перемещениями зажатых или удерживаемых деталей.
Роботы действуют по программе, записанной на специальном носителе информации без вмешательства человека. Их можно быстро переналаживать на изготовление новой продукции, поменяв лишь программу, хранящуюся в памяти робота. Это значительно повышает выработку и снижает расходы сырья, материалов и др.
Первоначально роботы стали применять в автомобильной промышленности, выполняя сравнительно простые технологические операции по металлообработке, сварке и окраске машин.
В нашей стране промышленные роботы стали применяться с 1971 г., а с 1972 г. началось их серийное производство.
Р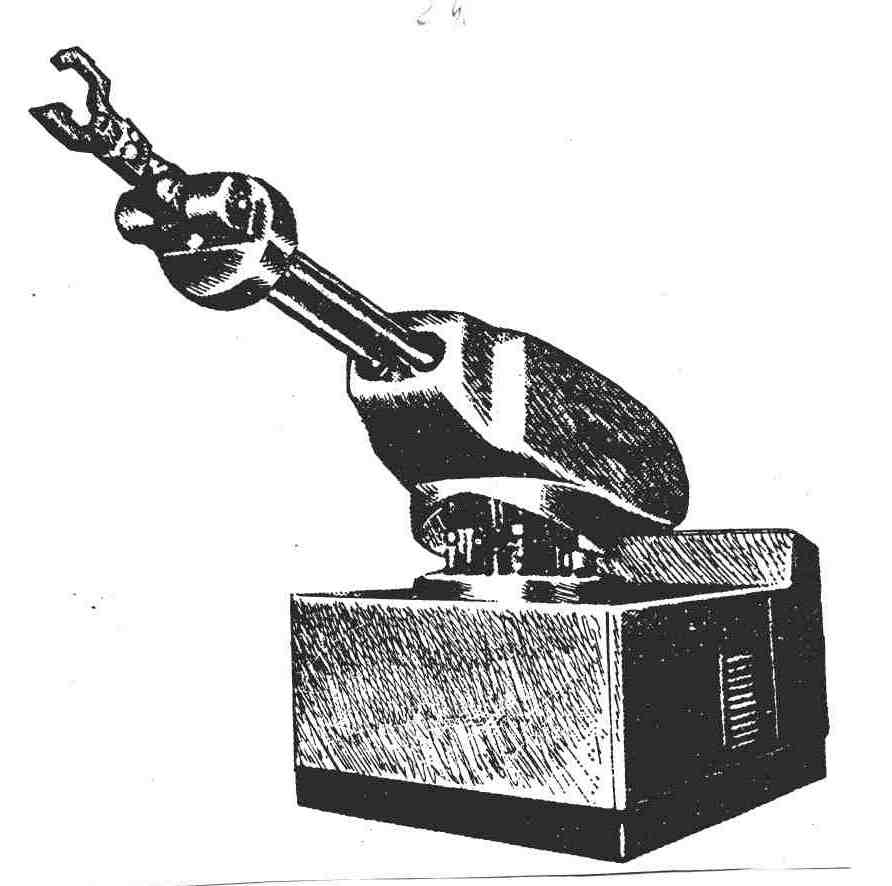 оботы
первого поколения (рис.8.1а) внешне не
похожи на человека. Только их манипулятор
напоминает человеческую руку, а захват
– ее кисть.
оботы
первого поколения (рис.8.1а) внешне не
похожи на человека. Только их манипулятор
напоминает человеческую руку, а захват
– ее кисть.
а)
б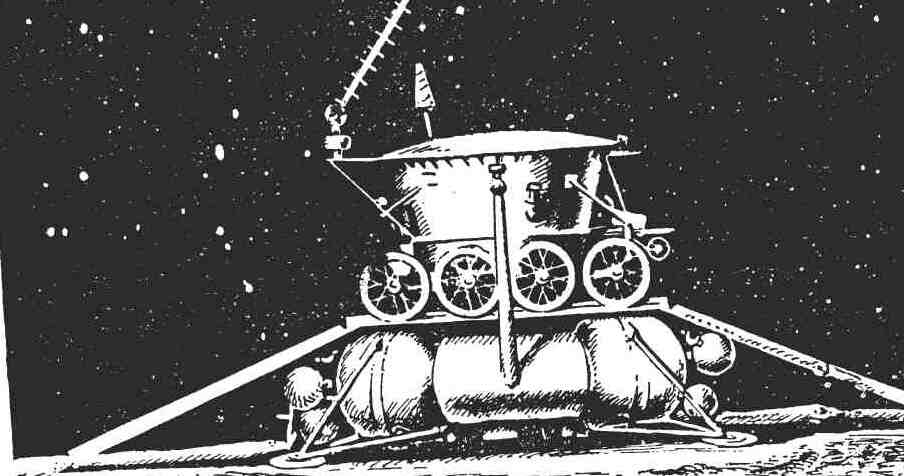 )
)
Рис. 8.1.Промышленные роботы: а – робот первого поколения;
б – «Луноход 1»
На Петродворцовом часовом заводе роботы производят сборку механизма часов. Многорукий робот, весящий всего 15кг, выполняет многие работы по ремонту судов: очистку, шлифование, окраску, притирку и др.
Роботы-манипуляторы с дистанционным управлением широко используются для работы в условиях относительной недоступности, например, крупный самоходный аппарат «Луноход 1» (рис.8.1б), а также в опасных и вредных для человека условиях, например, в атомной промышленности для работы с радиоактивными веществами.
Подводные роботы-манипуляторы захватывают образцы породы со дна моря и управляют работой подводной буровой установки.
В конце 60х гг. появились роботы 2 поколения, которые имеют «органы чувств» – разнообразные датчику, собирающие информацию о предметах окружающего мира, их свойствах и взаимодействии: на основе этих данных формируется модель и принимается решение о последовательности действий, которые реализуются исполнительными механизмами. Их манипуляторы-роботы снабжены датчиками, регистрирующими цвет, размер и т.д.
Роботы 3-го поколения наделены свойством анализировать возникшие ситуации, принимать решения, решать задачи, обучаться. Они начали разрабатываться в 1975 г.