

2.3 Рулевые механизмы
Рулевой механизм представляет собой редуктор. На автомобилях применяют механизмы с кинематическим передаточным числом 15…25 (с учетом рулевой трапеции). Кинематическое передаточное число i есть отношение угла поворота рулевого колеса к углу поворота управляемого колеса. Работу рулевого механизма также оценивают по силовому передаточному числу ip: отношению стабилизирующего момента на шинах к моменту на рулевом колесе.
Для обеспечения хорошей управляемости при высоких скоростях число i стремятся сделать большего значения. Чтобы снизить момент на рулевом колесе, образующийся при ударах шин о препятствия, конструкторы делают число ip больше i, и уменьшают передачу момента от шины к рулю. Для этого применяют механизмы с небольшим обратным КПД: 0,5…0,65. Они передают весь момент на руле к шинам, а обратно – меньший момент.
Для уменьшения усилия на рулевом колесе и удержания автомобиля на траектории при разрушении шин применяются гидроусилители. Они снижают усилие на руле в 10…15 раз.
2.4 Характеристика бокового увода шины
Характеристикой бокового увода называют зависимость боковой реакции RY колеса от угла увода (рис. 2.2).
При увеличении угла увода боковая реакция нарастает, достигает максимума RYMAX и затем снижается. Угол, при котором достигается RYMAX, называется критическим углом увода кр. Величина кр на дороге с высоким сцеплением составляет 11…13 град. Отношение RYMAX к нормальной нагрузке PZ отражает коэффициент бокового сцепления шины:
Y = RYMAX/PZ.

Рис. 2.2. Характеристика бокового увода шины (слева) и зависимость
коэффициента сопротивления уводу шины от нормальной нагрузки
(справа): 1 – радиальная шина, 2 – диагональная
Управляемость автомобиля зависит от наклона характеристики RY = = f() области малых углов . Наклон характеристики оценивают коэффициентом сопротивления уводу: KY = RY/, где RY – приращение реакции; – приращение угла (см. рис. 2.2).
Более информативным и удобным является удельный коэффициент по сопротивлению уводу: Y = KY/PZ, где PZ – нормальная нагрузка на колесо. Он позволяет сравнивать между собой различные шины. Шины радиальной конструкции обладают большим сопротивлением уводу (кривая 1), чем шины диагональной конструкции (кривая 2). С ростом нормальной нагрузки сопротивление уводу снижается (см. рис. 2.2). На графике показана нагрузка в процентах от экономичной (номинальной) нагрузки на шину.
Чем больше коэффициент Y, тем меньше расход топлива и быстрее автомобиль реагирует на поворот руля, особенно при большой скорости движения.
2.5 Движение автомобиля на повороте
Рассмотрим движение автомобиля на повороте с учетом углов увода управляемых колес (рис. 2.3). При движении с уводом образуются боковые реакции RY1 и RY2 колес, которые создают боковую силу инерции:
RY1 +RY2 =M V2/Rп = PjY,
где M – масса автомобиля; V – скорость центра масс C автомобиля; Rп –
расстояние от центра C до центра OП (см. рис. 2.3).
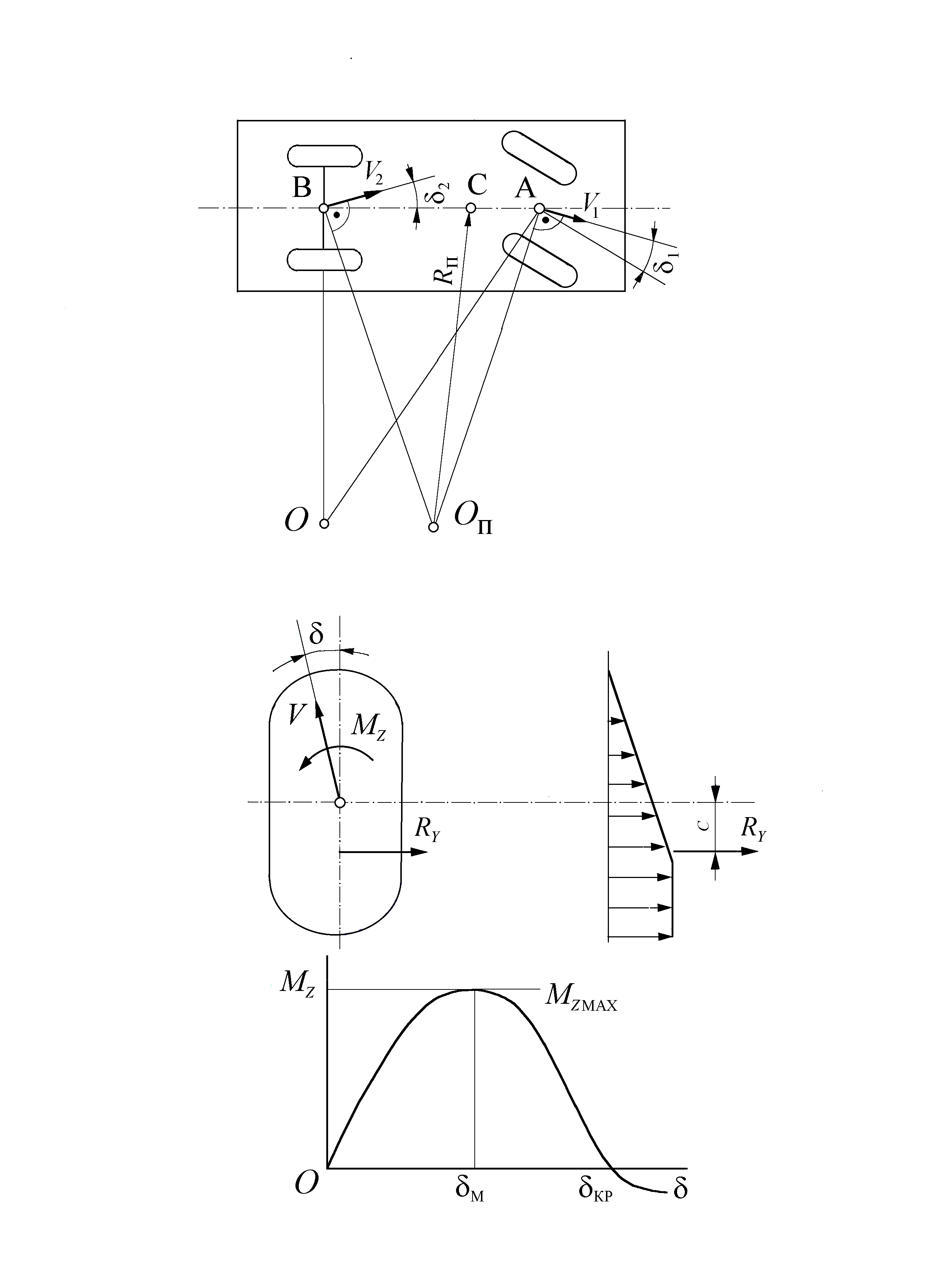
Рис. 2.3. Схема к расчету движения автомобиля на повороте
с учетом углов увода колес
Колеса передней оси движутся с углом увода 1, задней – с углом увода 2. Величины углов увода определяются характеристиками шин: 1 = = f (RY1) и 2 = f (RY2). Центр поворота автомобиля перемещается из точки O (без учета углов увода) в точку OП. Положение точки OП определяется пересечением двух линий, проведенных из середин передней и задней осей перпендикулярно векторам скоростей осей V1 и V2. Величина радиуса поворота связана с углами поворота колес и углами увода:
Rп L/(+2 –1). (16)
Точку OП называют мгновенным центром поворота, так как она перемещается при повороте руля и изменении скорости движения. При прямолинейном движении центр OП расположен в бесконечности. При качении колес с уводом центр поворота смещается вперед, по ходу движения автомобиля.
Расчет траектории движения автомобиля выполняют по характеристикам его шин, используя которые вычисляют углы увода и боковые реакции. Для большинства практических расчетов удается представить характеристику увода линейной: RY =KY(илиRY =Y PZ). Для расчета траектории движения автомобиля составляют системы дифференциальных уравнений, решение которых находят численным интегрированием на компьютере.
По соотношению углов увода оценивают поворачиваемость автомобиля: 1 2 – нейтральная; 1 > 2 – недостаточная; 2 > 1 – избыточная.
Конструкторы автомобиля стремятся обеспечить нейтральную его поворачиваемость во всех режимах движения и степени его загрузки. При нейтральной поворачиваемости достигается хорошая управляемость и устойчивость управления. Однако обеспечить во всех режимах движения нейтральную поворачиваемость невозможно. При недостаточной поворачиваемости автомобиль медленно, с запаздыванием, реагирует на поворот руля. При избыточной поворачиваемости автомобиль быстрее реагирует на поворот руля, но движение становится неустойчивым.