

2.6 Стабилизация автомобиля
При движении на повороте на руле автомобиля образуется стабилизирующий момент, стремящийся возвратить его в нейтральное положение, соответствующее прямолинейному движению. Момент на руле создает водителю чувство дороги. Конструкторы автомобиля обеспечивают на руле момент, пропорциональный углу поворота колес, и приемлемую для водителя величину этого момента. Момент на руле создается шиной и дополнительно конструкцией подвески с помощью углов установки колес.
При качении шины с уводом образуется стабилизирующий момент MZ, поворачивающий колесо относительно его вертикальной оси (рис. 2.4). При движении шины с углом увода и повороте колеса по часовой стрелке образуется пятно контакта (см. рис. 2.4, вверху, слева). Элемент протектора входит в контакт и сцепляется с дорогой, затем перемещается влево (см. рис. 2.4, вверху, справа). На элементе образуется сила, которая сначала линейно возрастает, затем ограничивается коэффициентом сцепления. Образуется эпюра поперечных касательных напряжений в виде трапеции. Сумма напряжений по всему контакту равна боковой реакции RY. Из-за несимметричности эпюры точка приложения реакции RY смещается вниз на плечо c. Образуется стабилизирующий момент MZ, поворачивающий шину против направления вращения часовой стрелки.
При увеличении угла увода момент MZ возрастает, достигает максимума, а затем снижается. Наибольшее значение MZMAX момента достигается при угле увода примерно кр/2. Для легковых шин различного размера момент оставляет 150…250 Нм. При достижении углом = кр момент становится равным нулю, затем он становится отрицательным (дестабилизирующим), но малой величины.
На покрытии с высоким сцеплением только нарастающий участок характеристики MZ =f () подходит для обеспечения стабилизирующего момента на руле MР. При низком сцеплении момент MZ становится небольшим и его недостаточно для создания MР. При углах увода = кр требуется наибольший момент MР, но момент MZ = 0. Следовательно, с помощью одного стабилизирующего момента шины невозможно создать момент MР на руле и обеспечить водителю чувство дороги.
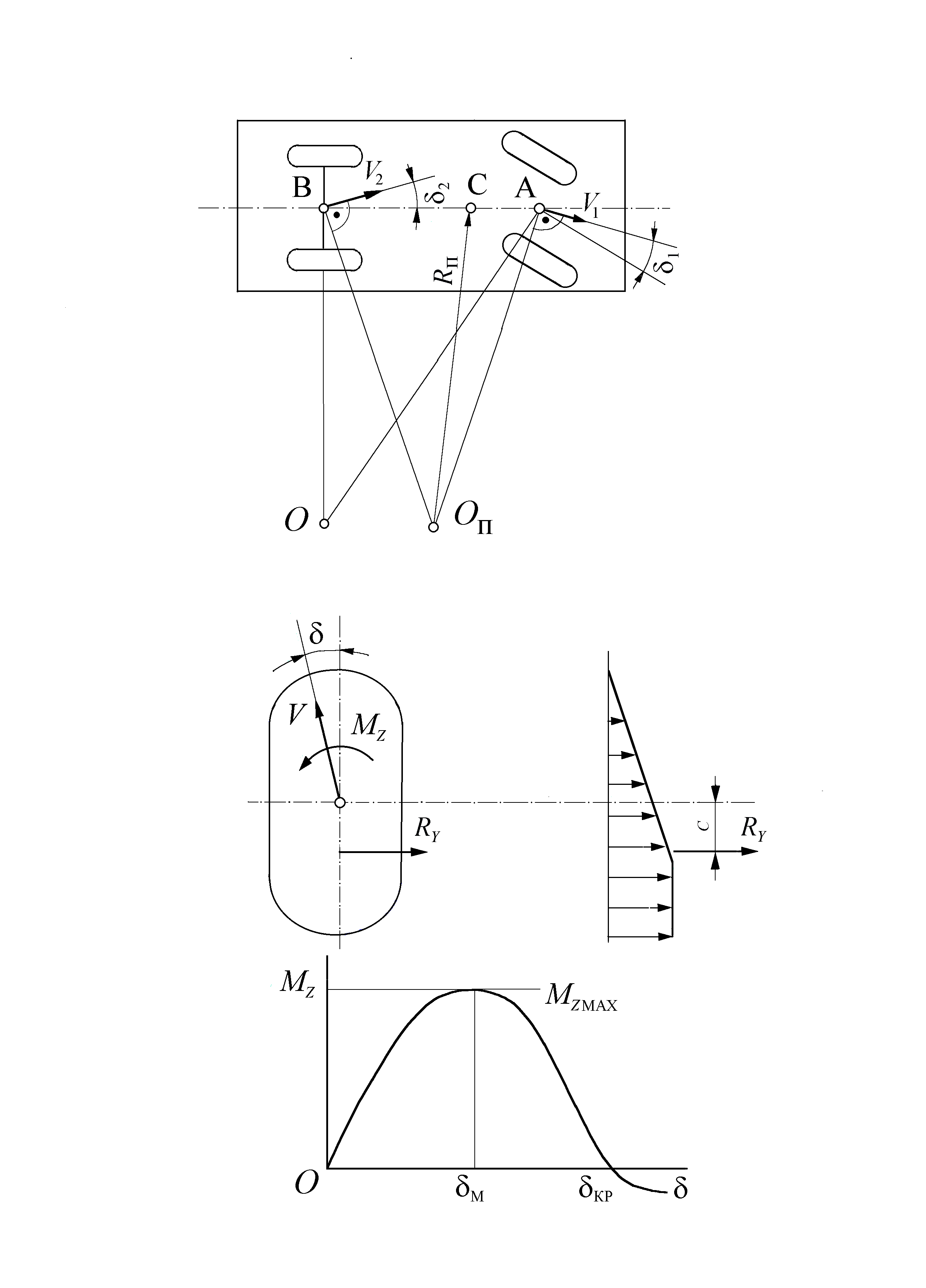
Рис. 2.4. Механизм образования стабилизирующего момента в
контакте шины; характеристика стабилизирующего момента
Чтобы получить момент MР на руле при углах увода = кр и более, ось поворота управляемого колеса наклоняют в продольной плоскости автомобиля на угол (рис. 2.5). Образуется дополнительное плечо d действия боковой реакции RY: d = rd sin (), где rd – динамический радиус колеса (см. рис. 2.5). На колесе возникает дополнительный стабилизирующий момент: MZ =d RY. МоментMZскладывается с моментом шиныMZ, в области больших углов увода появляется требуемый момент на руле.
Для получения момента на руле при низком сцеплении ось поворота управляемых колес наклоняют в поперечной плоскости на угол (рис. 2.6). При повороте колеса контакт шины вращается в плоскости DD, на плече обкатки u. При повороте руля автомобиль поднимается и образуется дополнительный, весовой стабилизирующий момент:
MZ = PZ u sin () (1 – cos ()).
Момент MZ не зависит от реакции RY (см. рис. 2.6). Он обеспечивает на покрытии с низким сцеплением момент на руле при значительных углах поворота колес . Угол для легковых автомобилей составляет 0,5..1,5.
Конструктор, подбирая углы и , получает приемлемую характеристику момента на руле MZ = f ().
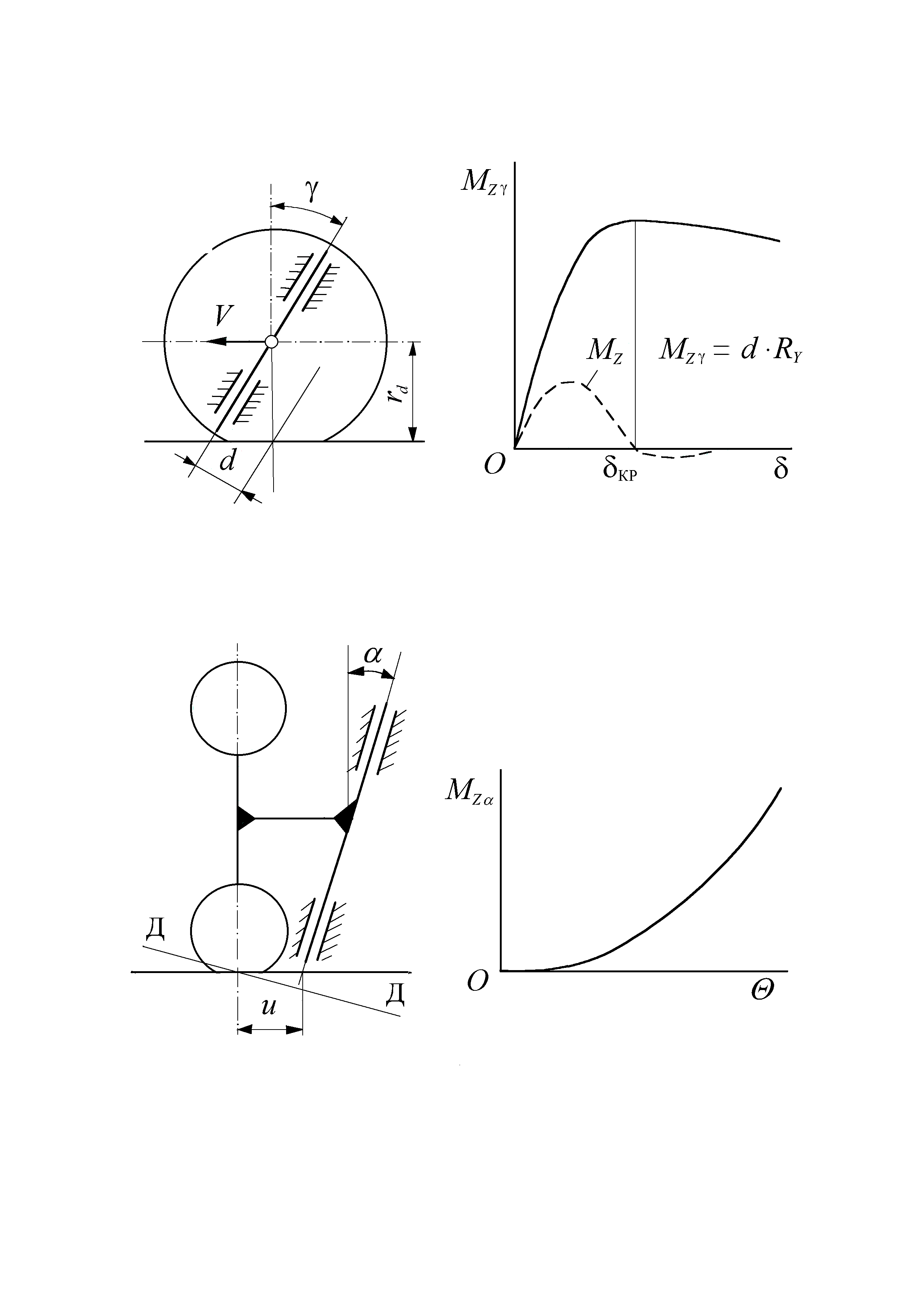
Рис. 2.5. Дополнительный стабилизирующий момент, создаваемый
путем продольного наклона оси поворота колеса (шкворня)
Управляемые колеса устанавливаются со схождением. Схождение задается углом схождения 0,5…1. Схождение обеспечивает небольшие боковые реакции, прижимающие колеса к середине автомобиля. Выбираются зазоры в подшипниках, повышается точность курсового управления. Управляемые колеса наклоняют в поперечной плоскости на угол развала 0,5..1,5. Это компенсирует прогиб передней балки (или кузова) под действием нагрузки.
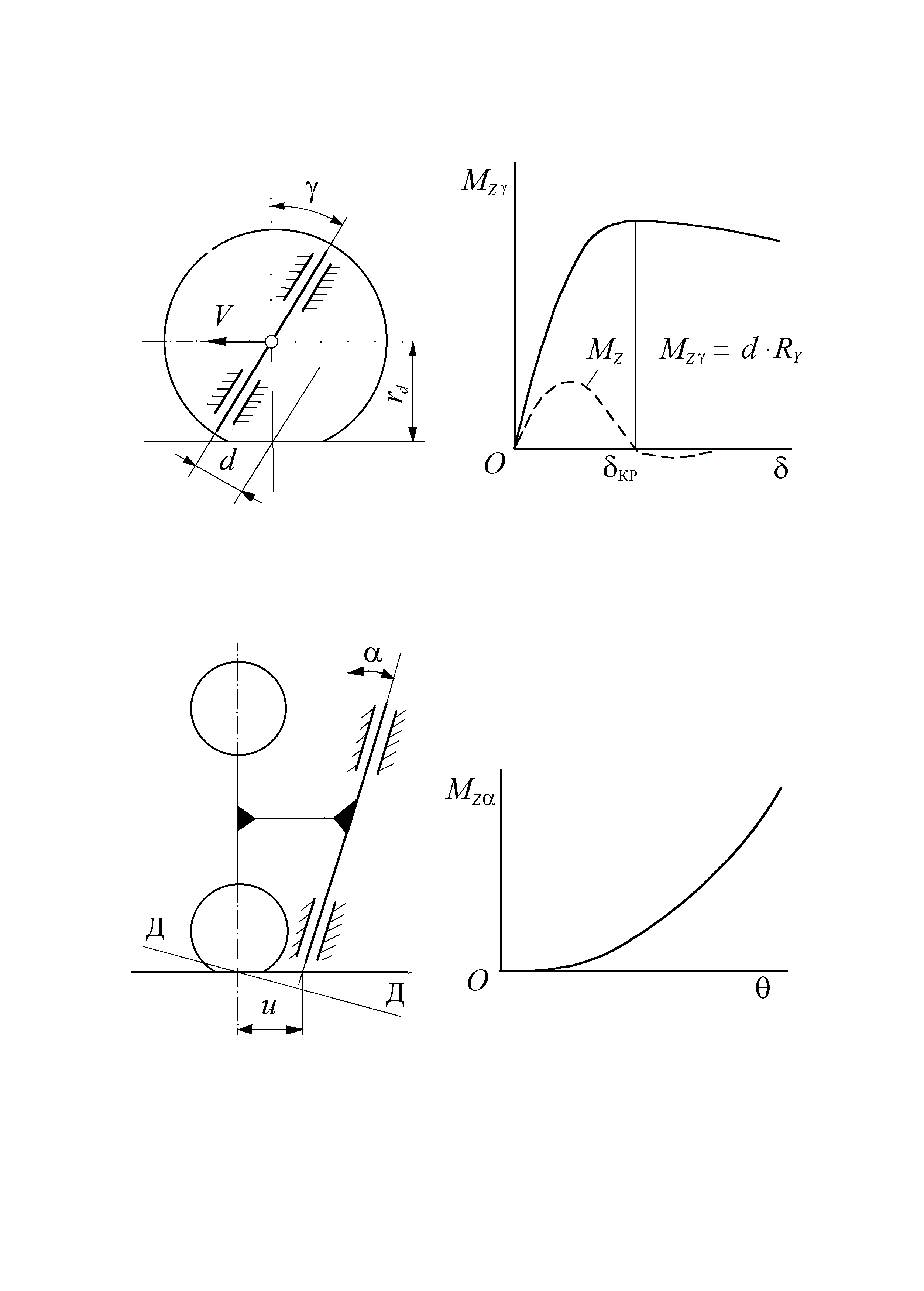
Рис. 2.6. Дополнительный стабилизирующий момент от поперечного
наклона оси поворота колеса (шкворня)