

§2. Управляемость автомобиля
2.1 Основные понятия и определения
Свойство автомобиля изменять траекторию движения соответственно управляющему воздействию водителя и сохранять заданную траекторию при действии реальных возмущений называются управляемостью.
На траекторию движения автомобиля оказывает влияние большое число различных факторов. Плохая управляемость ограничивает тяговые и скоростные свойства автомобиля, приводит к быстрому утомлению водителя и снижению безопасности движения. Хорошая управляемость обеспечивает активную безопасность автомобиля при движении с высокой скоростью.
На управляемость автомобиля оказывают влияние дорожное покрытие, характеристики шин, рулевой механизм и рулевая трапеция, углы установки управляемых колес.
Рулевой механизм преобразует угол поворота рулевого колеса в угол поворота управляемых колес автомобиля, и передает стабилизирующий момент от колес на рулевое колесо.
Все автомобили обладают свойством стабилизации. Стабилизация автомобиля – это способность автомобиля возвращаться в состояние прямолинейного движения при освобождении рулевого колеса.
В контакте шины с дорогой при движении колеса с уводом образуется стабилизирующий момент шины. За счет установки управляемых колес с определенными углами создается дополнительный стабилизирующий момент шины. Суммарный стабилизирующий момент передается рулевым механизмом на рулевое колесо и образуется сила на рулевом колесе.
Устойчивость управления оценивается в баллах по показателям устойчивости управления траекторией при прямолинейном движении, при торможении и управлении курсовым углом, а также по максимальным скоростям выполнения определенных испытаний.
Курсовым углом называют угол между продольной осью дороги и продольной осью автомобиля.
2.2 Кинематика движения автомобиля с низкой скоростью
на повороте
Если при движении автомобиля на повороте боковые реакции колес не превышают 50…70% максимальных реакций по сцеплению, то такое движение относят к режиму движения с низкой скоростью. В этом режиме приближенно считают, что скорости центров колес располагаются в продольных плоскостях вращения колес. В таком режиме легко вычислить положение центра поворота автомобиля и построить траекторию движения.
Рассмотрим движение автомобиля на повороте (рис. 2.1) со скоростью V. Пусть центр масс автомобиля расположен в точке C, и передние колеса повернуты на угол . Скорость колес V2 задней оси B направлена вдоль продольной оси автомобиля. Скорость колес V1 передней оси A направлена вправо (см. рис. 2.1). Проводим линии, перпендикулярные V1 и V2, и получаем точку их пересечения OП. В точке OП располагается центр поворота автомобиля. Все точки, расположенные на автомобиле, вращаются относительно центра OП, их скорости перпендикулярны лучам, выходящим из центра поворота.
Завод изготовитель указывает в технической характеристике автомобиля минимальный радиус поворота RП: расстояние наиболее удаленной точки Г автомобиля от центра поворота (см. рис. 2.1). Для построения траектории движения автомобиля удобно использовать радиус Rв поворота задней оси. Для расчетов траектории движения применяют также расстояние от центра масс C до центра поворота OП.
По рисунку отчетливо видно, что управляемые колеса должны быть повернуты на разные углы: л <п. Если взять л =п, то получим нежелательные боковые проскальзывания шин. Это приведет к повышенному износу шин, увеличится расход топлива. Для поворота колес на разные углы применяют рулевые трапеции.
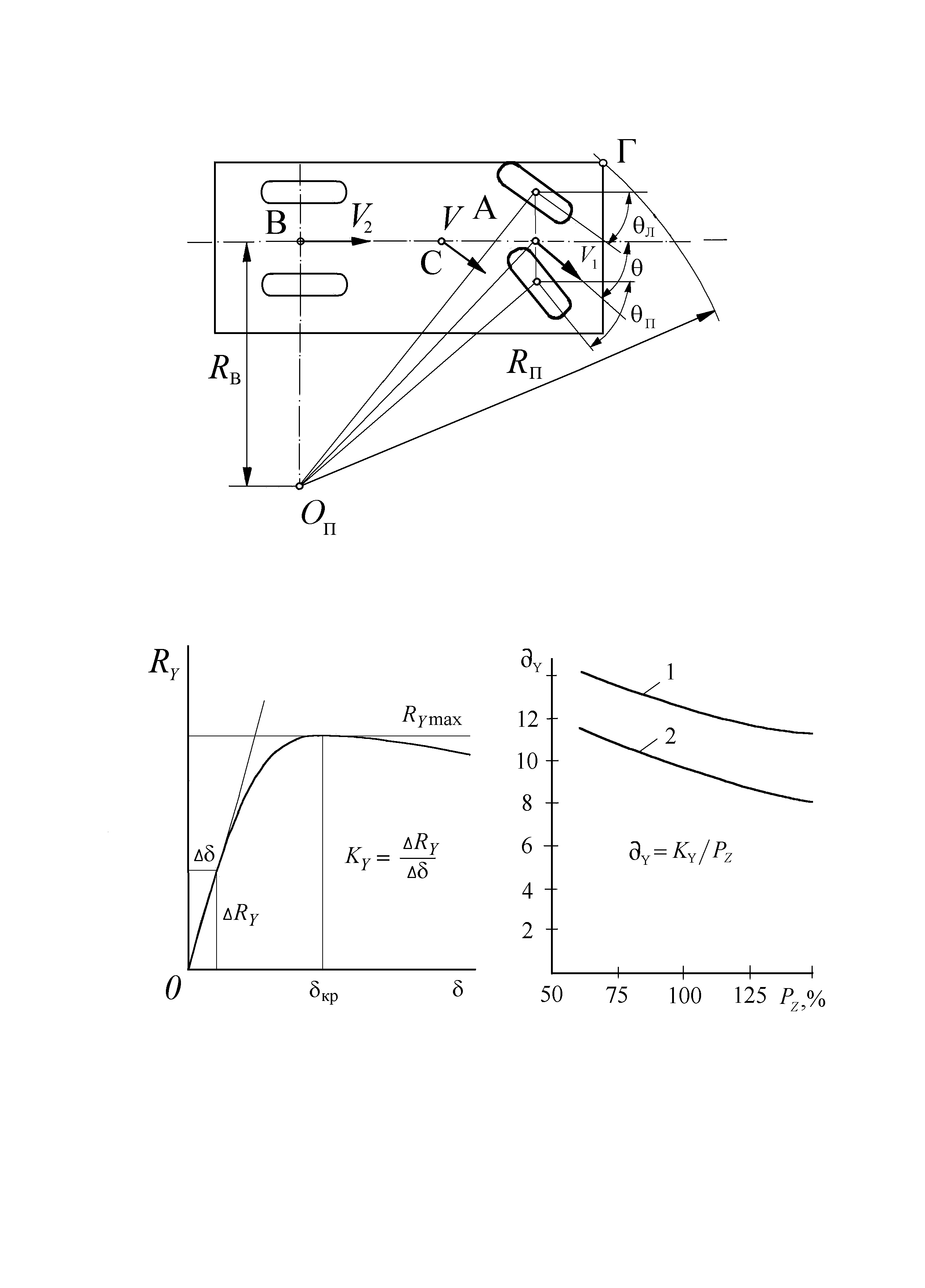
Рис. 2.1. Схема к расчету движения автомобиля на повороте