

3.4. Структурный анализ механизмов
Основной принцип образования рычажных механизмов был сформулирован в 1914 году профессором Л. В. Ассуром и заключается в следующем.
Схема любого механизма может быть составлена последовательным присоединением к входным (начальным) звеньям и стойке к.ц. с нулевой степенью подвижности. Такие к. ц. называются структурными группами Ассура. Примеры различных групп Ассура показаны на рис.10.
Начальное звено со стойкой образует простейший механизм 1-ого класса (рис.11).
Путем присоединения к таким механизмам различных групп Ассура можно получить механизм любой сложности.
Группы Ассура классифицируются по числу к.п., которыми они присоединяются к основному механизму. Это число определяет порядок группы. Кроме того, группа Ассура имеет класс, определяемый числом к.п., образующих наиболее сложный замкнутый контур.




Рис. 11
С остав
и последовательность присоединения
групп Ассура в механизме можно выразить
его формулой строения. Механизм в целом
классифицируется по группе наивысшего
класса. На рис.12 показан пример такой
классификации.
остав
и последовательность присоединения
групп Ассура в механизме можно выразить
его формулой строения. Механизм в целом
классифицируется по группе наивысшего
класса. На рис.12 показан пример такой
классификации.
3.5. Виды механизмов и их структурные схемы
Среди всего многообразия конструкций механизмов различают: стержневые (рычажные), кулачковые, фрикционные, зубчатые механизмы, механизмы с гибкими звеньями (например, ременные передачи) и др. виды.
Менее распространенные классификации подразумевают наличие механизмов с низшими или высшими парами в плоском или пространственном исполнении и т.д.
 Учитывая возможность условного
превращения практически любого механизма
с высшими парами в рычажный, в дальнейшем
наиболее подробно рассматривается
именно эти механизмы, а структурные
схемы других механизмов изложены в
соответствующих разделах.
Учитывая возможность условного
превращения практически любого механизма
с высшими парами в рычажный, в дальнейшем
наиболее подробно рассматривается
именно эти механизмы, а структурные
схемы других механизмов изложены в
соответствующих разделах.
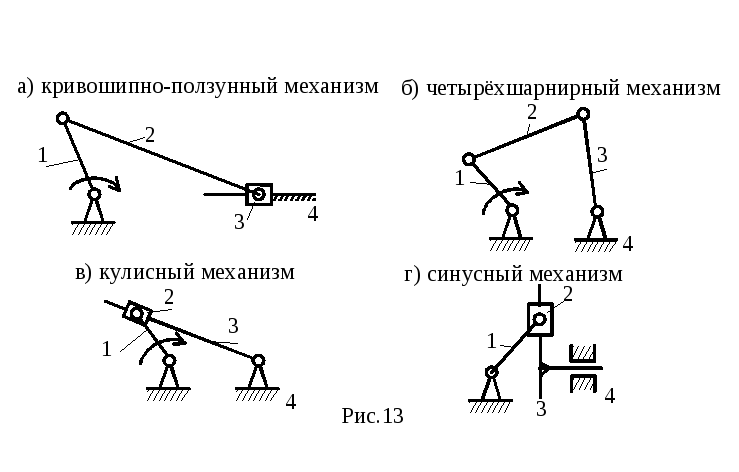
Среди рычажных механизмов наиболее распространенны так называемые четырехзвенные, примеры которых представлены на рис.13, а-г.
В этих механизмах встречаются однотипные звенья: кривошип– звено, совершающее полнооборотное вращательное движение вокруг неподвижной оси;коромысло– звено, совершающее неполнооборотное вращательное движение вокруг неподвижной оси;ползун– звено, совершающее поступательное движение относительно стойки;камень– звено, совершающее поступательное движение относительно подвижной направляющей, называемой кулисой;шатун– звено, совершающее плоскопараллельное движение.
4. Кинематический анализ рычажных механизмов
Кинематический анализ механизмов включает вопросы изучения звеньев с геометрической точки зрения, т.е. без учета действующих сил. Для этого используются графические, аналитические и экспериментальные методы исследования.
Одним из наглядных методов является графоаналитический, который включает:
а) построение планов положения механизма; б) определение скоростей и ускорений характерных точек или звеньев механизма.
При графических построениях на чертеже изображаются длины звеньев, скорости, ускорения и др. величины в определенном масштабе, характеризуемом масштабным коэффициентом:
=значение параметра/длина отрезка.
Например, вектор pa длиной 10 мм изображает скоростьV=20 м/с. Тогдаv=20/10=2 м·с-1/мм.