

Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Ульяновский государственный технический университет
Теория
механизмов
и машин
Методические указания
для студентов машиностроительных
специальностей
Ульяновск
2006
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Ульяновский государственный технический университет
Теория
механизмов
и машин
Методические указания
к лабораторной работе по дисциплине
«Теория механизмов и машин» для студентов
машиностроительных специальностей
Издание второе
Составитель В. Я. Недоводеев
Ульяновск
2006
УДК 621.01(076)
ББК 34.41я7
Т33
Рецензент д-р техн. наук, профессор, заведующий кафедрой «Сопротивление материалов» В. К. Манжосов
Одобрены секцией методических пособий научно-методического
совета университета
Т33Теория механизмов и машин: методические указания / cост. В. Я. Недоводеев. – 2-е изд., перераб. – Ульяновск: УлГТУ, 2006. – 40с.
Составлены в соответствии с программой курса «Теория механизмов и машин». В методических указаниях приведены описания и методика выполнения лабораторных работ по основным разделам курса теории механизмов и машин. МУ предусматривают возможность выбора лабораторных работ в соответствии с учебным планом специальности и могут быть использованы для всех форм обучения.
Работа подготовлена на кафедре «Основы проектирования машин».
УДК 621.01 (076)
ББК 34.41 я7
В. Я. Недоводеев, составление, 2006, с изм.
В. Я. Недоводеев, 1993.
Оформление. УлГТУ, 2006
О Г Л А В Л Е Н И Е
|
1. Лабораторная работа по теме: «Составление кинематических схем и структурный анализ механизмов с низшими парами» …………………….. |
4 |
|
2. Лабораторная работа по теме: «Определение основных параметров кулачковых механизмов»…………………………………………………….. |
8 |
|
3. Лабораторная работа по теме: «Определение передаточного отношения планетарного редуктора с цилиндрическими колесами» …….. |
13 |
|
4. Лабораторная работа по теме: «Нарезание зубчатых колес методом обкатки»……………………………………………………………………….. |
17 |
|
5. Лабораторная работа по теме: «Уравновешивание вращающихся масс, расположенных в разных плоскостях» ……………………………………… |
22 |
|
6. Лабораторная работа по теме: «Определение моментов инерции звеньев методом физического маятника» ……………………………….. |
29 |
|
7. Лабораторная работа по теме: «Определение моментов инерций звеньев методом монофилярного (однониточного) подвеса» …………….. |
34 |
|
8. Лабораторная работа по теме: «Циклограммирование исполнительного механизма» ……………………………………………….. |
37 |
ЛАБОРАТОРНАЯ РАБОТА ПО ТЕМЕ:
«СОСТАВЛЕНИЕ КИНЕМАТИЧЕСКИХ СХЕМ И СТРУКТУРНЫЙ
АНАЛИЗ МЕХАНИЗМОВ С НИЗШИМИ ПАРАМИ»
Цель работы
Приобретение навыков по составлению кинематических схем, определению класса и порядка механизмов с низшими парами.
Время выполнения работы – два академических часа.
Порядок выполнения работы
2.1. Вычерчивание схемы механизма в масштабе Мℓ.
2.2. Определение степени подвижности механизма.
2.3. Определение класса и порядка механизма.
2.4. Составление формулы строения механизма.
3. Методические указания
3.1. Перед вычерчиванием схемы механизма необходимо замерить длины его звеньев с помощью линейки или штангенциркуля.
Звенья нумеруются арабскими цифрами, кинематические пары – заглавными буквами русского алфавита. Каждому звену дается наименование и заполняется таблица звеньев.
3.2. Определение степени подвижности производится после заполнения таблицы кинематических пар. Класс кинематической пары определяется в соответствии с классификацией Артоболевского по формуле
К=6–Н,
где К – класс кинематической пары, Н – количество относительных движений каждого из звеньев относительно другого в паре.
Степень подвижности механизма определяется по формуле Чебышева П. Л.:
W=З(n–1)–2Р5–Р4,
где n – число всех звеньев в механизме; Р5 – число пар 5-го класса; Р4 – число пар 4-го класса.
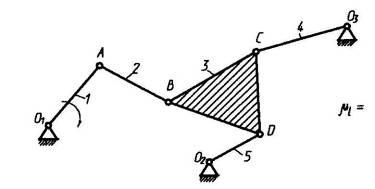
3.3. Определение класса и порядка механизма производится следующим образом. В соответствии со степенью подвижности механизма выделяется группа начальных звеньев и оставшаяся часть разбивается на структурные группы. Как те, так и другие вычерчиваются в масштабе Мℓ. Определяется класс и порядок структурных групп и по наивысшему классу группы – класс и порядок всего механизма. При наличии пассивных звеньев необходимо исключить их из рассматриваемой группы. На рис. 1 приведен пример.
3.4. Формула строения механизма записывается согласно последователь-ности присоединяемых к группе начальных звеньев структурных ассуровских групп. Для примера, показанного на рис. 1, формула строения запишется в виде
1(6,1) З3 (2,3,4,5).
Для выполнения лабораторной работы используются макеты различных механизмов с низшими парами.
4. Контрольные вопросы
4.1. Что называется механизмом?
4.2. Что называется машиной?
4.3. По каким признакам классифицируются механизмы?
4.4. Какие звенья называются начальными, ведущими, ведовыми, входными, рабочими, пассивными, выходными?
4.5. Какие звенья получили названия: кривошипа, шатуна, кулисы, камня, коромысла, ползуна?
4.6. Как изображаются на кинематических схемах звенья механизма?
4.7. Что называется кинематической парой?
4.8. По каким признакам классифицируются кинематические пары?
4.9. Какая кинематическая пара называется высшей?
4.10. Какая кинематическая пара называется низшей?
4.11. Какими преимуществами и недостатками обладают высшие и низшие кинематические пары?
4.12. Каким образом кинематические пары классифицируются по числу условий связи?
4.13. Что называется масштабным коэффициентом?
4.14. Что называется планом механизма?
4.15. Что называется степенью подвижности механизма?
4.16. Что показывает формула Чебышева П. Л.?
4.17. Сколько степеней подвижности у механизма первого класса?
4.18. Что называется кинематической цепью?
4.19. Как классифицируются кинематические цепи?
4.20. Какая кинематическая цепь называется замкнутой?
4.21. Каким образом кинематическая цепь преобразуется в механизм?
4.22. Что называется структурной группой?
4.23. Как определяется класс и порядок с труктурной группы по Артоболевскому И. И.?
4.24. Как записывается формула строения механизма?
4.25. Что такое избыточная связь в механизме?
Кинематическая схема механизма


Механизм I-го класса
группа 3-го класса 3-го порядка
Рис. 1. Пример структурного анализа
Библиографический список
1. Теория механизмов и машин / под ред. К. В. Фролова. М.: Высш. Шк., 1987. С. 19–59.
2. Юдин, в. А. Теория механизмов и машин. В. А. Юдин, л. В. Петрокас м.: Высшая шк., 1977. С. 15–36.
Группа________________________
Студент_______________________
Преподаватель_________________
Дата__________________________
ПРОТОКОЛ ЛАБОРАТОРНОЙ РАБОТЫ ПО ТЕМЕ:
«СОСТАВЛЕНИЕ КИНЕМАТИЧЕСКИХ СХЕМ И СТРУКТУРНЫЙ
АНАЛИЗ МЕХАНИЗМА»
Кинематическая схема механизма
Таблица звеньев
-
№/№
п/п
Наименование звеньев
1.
2.
Кривошип
Шатун
Определение степени подвижности механизма
Таблица кинематических пар
-
Обозначание
кинематической
пары
Звенья, входящие
в кинематическую пару
Наименование
кинематической пары
Класс кинематической
пары
А
1-2
Вращательная
5
3. Определение класса и порядка механизма
4. Формула строения механизма
ЛАБОРАТОРНАЯ РАБОТА ПО ТЕМЕ:
«ОПРЕДЕЛЕНИЕ ОСНОВНЫХ ПАРАМЕТРОВ КУЛАЧКОВЫХ
МЕХАНИЗМОВ»
Цель работы
Определение основных параметров кулачка, построение диаграмм перемещения толкателя в функции от угла поворота кулачка и диаграммы углов давления.
Время выполнения – два академических часа.
2. Порядок выполнения работы
2.1. Определить параметры кулачка и составить диаграмму S=S() .
2.2. Путем графического дифференцирования построить диаграмму ds/d=ds/d().
2.3. Определить текущий угол давления в заданном положении механизма, используя совмещенную диаграмму S=S(ds/d).
3. Методические указания
3.1. К основным параметрам кулачка относятся (рис. 2)
Rmin– минимальный радиус кулачка;
Rmax– максимальный радиус кулачка;
Н – ход толкателя;
уд– угол давления толкателя;
д– угол дальнего стояния;
в– угол возврата толкателя;
0– угол ближнего стояния;
– радиус ролика толкателя;
е – эксцентриситет (рис. 2, 3).
3.2. Студент по шаблону кулачка (рис. 3)определяет параметры и, используя метод обращения, вычерчивает диаграмму перемещения толкателя S=S(). При наличии ролика практический профиль кулачка заменяется теоретическим (эквидистантным), отстоящим от него на величину(рис. 4).
3.3. На диаграмме S=S() по осям ординат в соответствующих масштабах откладываются отрезкиysi, а по абсцисс углыIповорота кулачка.

Рис. 2. Кинематическая схема Рис. 3. К определению перемещений
кулачкового механизма толкателя методом обращения
с роликовым толкателем

Рис. 4. Построение диаграмм перемещений
аналогов скоростей и угла давления
3.4. Методом графического дифференцирования (рис. 4) строится диаграмма аналога скоростей ds/d () и затем совмещенная диаграмма S=S(dS/d) путем исключения параметра . При построении диаграммы ds/d () полюсное расстояние Нds/d выбирается из условия
Нds/d=1/, тогда s=ds/d.
3.5. На диаграмме S=S (ds/d) определяется угол давления I=90-i для заданного положения толкателя, который сравнивается с соответствующим ему углом, построенным на профиле кулачка. На диаграмме S(ds/d) удобнее определять угол передачи i,соединяя конец вектора аналога скорости с осью вращения кулачка.
4. Контрольные вопросы
4.1. По каким признакам и как классифицируются кулачковые механизмы?
4.2. Чем отличаются теоретический и практический профили кулачка?
Что называется ходом толкателя?
Что называется углом колебания коромыслового толкателя?
Назовите основные параметры кулачка
4.6. В чем заключаются преимущества и недостатки кулачковых механизмов?
В чем заключается кинематический анализ кулачкового механизма?
Как проводится кинематический анализ кулачкового механизма?
В чем заключается метод обращения?
От каких параметров зависит износ поверхности профиля кулачка?
Какой угол называется углом давления?
От каких геометрических параметров зависит угол давления?
Как найти угол давления на профиле кулачка?
Как строится диаграмма S=S(ds/d)?
4.15. Как определить угол давления кулачка с помощью диаграммы S=S(ds/d) и других параметров кулачка (e, Rmin и т. п.)?
4.16. Какое действие оказывает угол давления на характер работы кулачкового механизма?