

7.4.6. Проектирование кулачковых механизмов с плоским (тарельчатым) толкателем
В механизме с плоским толкателем угол давления во всех положениях равен нулю (рис. 60, а), поэтому он не может быть использован для определения центра вращения кулачка. В этом случае используют условие выпуклости профиля кулачка ρ>0 (ρ – радиус кривизны профиля).
Заменяя кулачковый механизм стержневым (рис. 60, б), план ускорения которого можно построить из условия подобия (рис. 60, в):
∆КАЕ ~ ∆πkв,
получим
![]() ,
,
т.
е.
![]() и
и![]() или
или
![]() .
.

рис. 60
Следовательно,
просуммировав две диаграммы S(φ)
и
![]() ,
построенные в одном масштабе
,
построенные в одном масштабе![]() ,
получим величинуrmin
(рис. 61, г) имеющую несколько большее
значение, чем абсолютная величина
отрицательной ординаты на суммарной
диаграмме.
,
получим величинуrmin
(рис. 61, г) имеющую несколько большее
значение, чем абсолютная величина
отрицательной ординаты на суммарной
диаграмме.
8. Фрикционные и зубчатые механизмы
Фрикционные и зубчатые механизмы предназначены для передачи вращательного движения с одного вала на другой с помощью деталей типа диска в основном цилиндрической формы. При этом, как правило, меняется величина угловой скорости и передаваемого момента, а также их направление. Вал, от которого передаётся движение, называется ведущим, а вал, которому передаётся движение – ведомым.
Оси валов могут быть параллельными, пересекаться или перекрещиваться под различными углами. В первом случае механизм является плоским, в остальных случаях механизмы пространственные.
8.1. Общие сведения о передачах вращения
Если в механизме имеются только ведущие и ведомые валы и отсутствуют промежуточные вращающиеся звенья, то механизм называется передачей. Передача вращения может осуществляться:
1) путём непосредственного соприкосновения двух дисков, жёстко связанных с ведущим и ведомым валами (фрикционная, червячная, зубчатая);
2) посредством промежуточных гибких тел, сцепляющихся с дисками, которые жёстко связаны с ведущим и ведомым валами (ременная, цепная, волновая).
Отношения
угловых скоростей вращения обоих валов
передачи называется передаточным
отношением
![]() ,
которое характеризует процесс
преобразования движения количественно.
,
которое характеризует процесс
преобразования движения количественно.
Отношения
угловой скорости ведущего вала к угловой
скорости ведомого называется передаточным
числом
![]() ,
которое определяет направление передачи
энергии.
,
которое определяет направление передачи
энергии.
Величина
![]() и
и
![]() может меняться или оставаться постоянным
за время одного оборота ведущего вала.
может меняться или оставаться постоянным
за время одного оборота ведущего вала.
Любую передачу можно схематично представить в виде двух начальных поверхностей, контактирующих между собой, а плоскую передачу – в виде двух начальных окружностей, перекатывающихся друг по другу без скольжения и контактирующих в полюсе р (рис. 61). Тогда

![]() ,
т. е.
,
т. е.
 -
передаточное число.
-
передаточное число.
рис. 61
Аналогично можно изобразить ременную или цепную передачи, а также пространственные передачи (рис. 62).
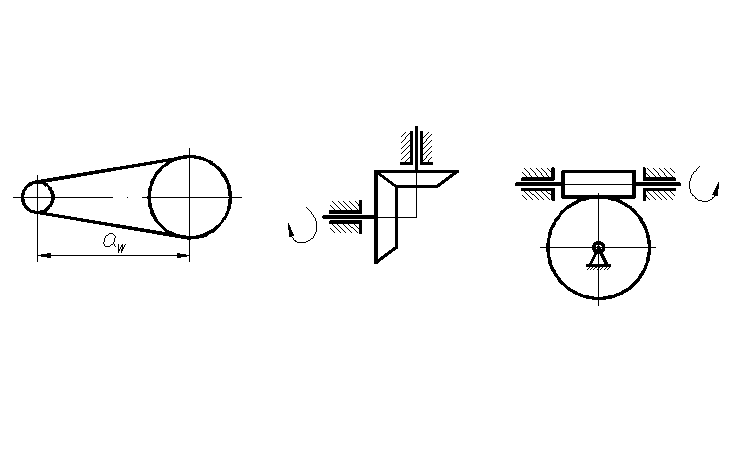
рис. 62
8.2. Фрикционные передачи
О дной
из наиболее простых и во многих случаях
достаточно надёжной является фрикционная
передача, состоящая в простейшем случае
из двух колёс (катков), закреплённых на
ведущем и ведомом валах. Для передачи
движения без скольжения необходимо
приложить к одному из колёс силуQ,
достаточную для возникновения трения
в месте контакта (рис. 63), при этом
касательная сила их сцепления равна по
величине передаваемого окружному
усилию.
дной
из наиболее простых и во многих случаях
достаточно надёжной является фрикционная
передача, состоящая в простейшем случае
из двух колёс (катков), закреплённых на
ведущем и ведомом валах. Для передачи
движения без скольжения необходимо
приложить к одному из колёс силуQ,
достаточную для возникновения трения
в месте контакта (рис. 63), при этом
касательная сила их сцепления равна по
величине передаваемого окружному
усилию.
рис. 63
Фрикционные передачи могут быть с постоянным и переменным передаточным отношением. Последние называются вариаторами (рис. 64 а, б).
 рис.
64
рис.
64
Достоинствами фрикционных передач являются: плавность и бесшумность в работе, простота конструкции, невозможность поломки при резком изменении крутящего момента на одном из валов благодаря возможности проскальзывания катков, возможность бесступенчатого регулирования скоростей.
Недостатками являются: необходимость прижимного устройства, непостоянство передаточного отношения, невозможность передачи значительных крутящих моментов.
В связи с указанными недостатками фрикционные передачи не получили такого широкого распространения как зубчатые.