

2. Основные стадии проектирования и создания новой техники
При проектировании новой техники возникает необходимость проведения работ, связанных с анализом и синтезом новой конструкции.
Анализ осуществляется при заданных размерах и массе звеньев, когда необходимо определить: скорости, ускорения, действующие силы, напряжения в звеньях и их деформации. В результате может быть произведен проверочный расчет на прочность, выносливость и т.д.
Синтез осуществляется при заданных скоростях, ускорениях, действующих силах, напряжениях или деформациях. При этом требуется определить необходимые размеры звеньев, их форму и массу.
При синтезе часто решается задача оптимального проектирования конструкции, когда находятся необходимые показатели работы машины при наименьших затратах труда.
Обычно основными этапами создания новой конструкции являются:
1) Разработка принципиальной схемы;
2) Проектирование и расчет машины и отдельных ее узлов;
3) Экспериментальные исследования и доводка опытного образца.
Проектирование новой техники включает следующие основные этапы:
а) разработка технического задания, включающего основные исходные данные;
б) разработка эскизного проекта, включающего выбор схемы и компоновку основных узлов конструкции;
в) разработка технического проекта, где осуществлены основные расчеты и представлены сборочный чертеж и др. документация.
При проектировании сложных механизмов обычно стремятся выделить из общей схемы отдельные, более простые типовые механизмы, проектирование которых имеет свои закономерности. К таким широко используемым в технике механизмам относятся: рычажные (стержневые), кулачковые, фрикционные, зубчатые и др., причем с точки зрения строения, кинематики и динамики любой механизм можно заменить условным рычажным механизмом с последующим его анализом, поэтому структура, кинематика и динамика рычажных механизмов рассматривается наиболее подробно.
3. Структурная классификация и виды механизмов
3.1. Классификация кинематических пар

Подвижные соединения двух звеньев, называемые кинематической парой (к.п.), классифицируются по разным признакам, например, по характеру соприкосновения звеньев – на низшие, когда контакт происходит по поверхности, и высшие, когда контакт звеньев осуществляется по линии или в точке (рис.2, а, б).
Преимуществом низших к.п. является возможность передачи значительных усилий при малом износе, а достоинством высших к.п. возможность воспроизводить достаточно сложные относительные движения.
 Низшие
к.п. могут быть поступательными,
вращательными, плоскими и пространственными,
а также классифицироваться по числу
условий связи, накладываемых на звенья
при соединении их в к.п.
Низшие
к.п. могут быть поступательными,
вращательными, плоскими и пространственными,
а также классифицироваться по числу
условий связи, накладываемых на звенья
при соединении их в к.п.
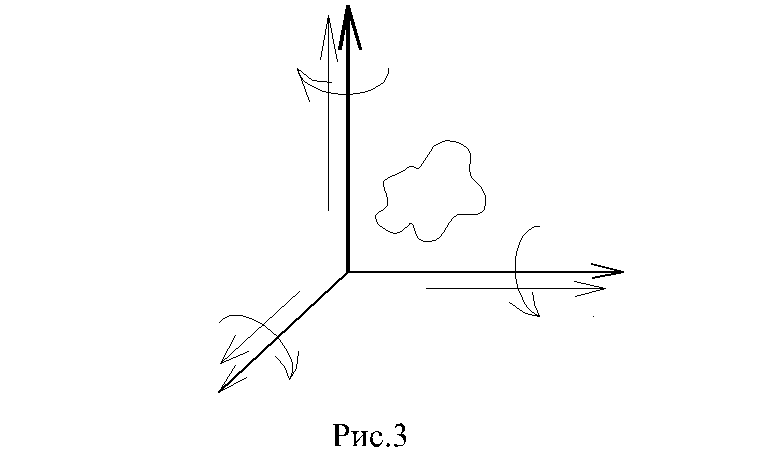
Любое тело в декартовой системе координат (рис.3) имеет 6 степеней свободы или подвижности (W=6), часть из которых уничтожается в к.п., при этом класс к.п. определяется числом накладываемых связей (6-S),
где S – число относительных движений звеньев в к.п. Например, на рис. 4а-д
п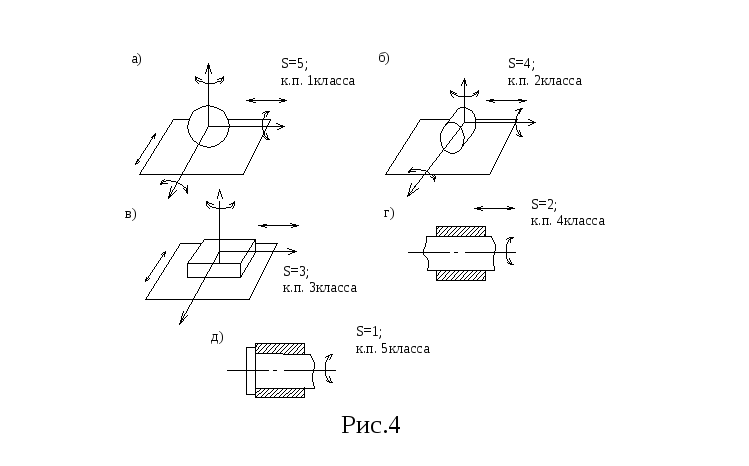 риведены
к.п. различных классов.
риведены
к.п. различных классов.
К инематические
пары и звенья механизмов изображаются
упрощенно (рис.5) при соблюдении ГОСТа
на обозначения звеньев и к.п.
инематические
пары и звенья механизмов изображаются
упрощенно (рис.5) при соблюдении ГОСТа
на обозначения звеньев и к.п.