

43.Понятие устойчивого положения равновесия автономной системы.
Построим фaзовые траектории на фазовой плоскости системы с постоянными действительными коэффициентами:
|
|
|
(1.9)
Заметим,
что начало координат (0,0)
всегда является положением равновесия
системы (1.9).
Это положение равновесия тогда и только
тогда является единственным, когда
детерминант матрицы
![]() отличен
от нуля, или что то же, оба собственных
значения этой матрицы отличны от нуля.
отличен
от нуля, или что то же, оба собственных
значения этой матрицы отличны от нуля.
Рассмотрим
скалярные величины x1,
x2
как координатный столбец
![]() вектора
вектора![]() в
двумерном линейном пространстве
в
двумерном линейном пространстве![]() ,
в котором фиксирована некоторая
ортогональная координатная система
,
в котором фиксирована некоторая
ортогональная координатная система![]() ;
матрица
;
матрица![]() задает
линейный оператор
задает
линейный оператор![]() такой,
что
такой,
что
|
|
(1.10) |
Перепишем систему (1.9) в матричной форме:
|
|
(1.11) |

а также в инвариантной форме:
|
|
(2.2)
Определение
Будем
говорить, что точка покоя xi
= 0 i = 1…n системы
![]()
устойчива,
если ![]()
![]()
![]()
![]() > 0
> 0![]()
![]()
![]()
![]() > 0 такие, что любая траектория
начинающаяся t = t0
в точке M0
> 0 такие, что любая траектория
начинающаяся t = t0
в точке M0
![]()
![]() U
U![]()
![]() все
время остается в эпсилон окрестности.
все
время остается в эпсилон окрестности.
Точка покоя асимптотически устойчива если
Она устойчива



 > 0 такое что каждая траектория системы
начинается в точке M0
> 0 такое что каждая траектория системы
начинается в точке M0

 U
U
 стремится к началу координат при t
стремится к началу координат при t



44.Простейшие типы точек покоя
Решение
системы
![]()
(2.2)
будем
искать в виде x = ![]()
![]() y =
y =![]()
![]()
![]()
![]() = 0
= 0
л2 – (a11+a22)л + a11a22 – a21a12 = 0
![]()
(2.3)
1.Корни ХАУРА л1, л2 – действительные и различные
X =
Y
= ![]()
![]()
(2.4)
![]()
![]() -определяются из (2.3)
-определяются из (2.3)
с1, с2 – произвольные постоянные
а) Если
l1 < 0, l2 < 0.
, то точка покоя M0 асимптотически устойчива, т.к. из-за наличия множителей
![]()
![]() в (2.4) все точки находящиеся в начальный
момент при t = t0
в любой дельта окрестности и начала
координат при t
в (2.4) все точки находящиеся в начальный
момент при t = t0
в любой дельта окрестности и начала
координат при t ![]()
![]()
![]()
![]() стремятся к началу координат
стремятся к началу координат
|

б) l1 > 0, l2 > 0.
Этот случай переходит в предыдущий при замене t на –t
в) l1 < 0 < l2.
Тогда
точка покоя неустойчива, так как
движущиеся по траектории x = ![]()
![]() y =
y =![]()
![]() (2.5) точка при сколь угодно малых значениях
с1 и при t
(2.5) точка при сколь угодно малых значениях
с1 и при t![]()
![]()
![]()
![]() выходит из эпсилон окрестности начала
координат. В данном случае существует
движение приближающееся к началу
координат.
выходит из эпсилон окрестности начала
координат. В данном случае существует
движение приближающееся к началу
координат.
x=
При
различных значениях с2 получает различные
движения по одной и той же прямой y =
![]()
![]() x
x
При
t ![]()
![]()
![]()
![]() точки на этой прямой движутся в
направлении начала координат. Точки
траектории (2.5) при t
точки на этой прямой движутся в
направлении начала координат. Точки
траектории (2.5) при t![]()
![]()
![]()
![]() движутся по прямой y =
движутся по прямой y =![]()
![]() x
удаляясь от начала координат
x
удаляясь от начала координат

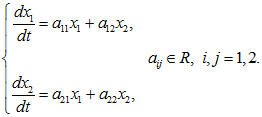
2.Корни ХАУРА комплексные
л1,2
= p![]()
![]() qi,
q
qi,
q![]()
![]() 0
0
x=
y=![]()
![]() (c1*
(c1*![]()
![]() +
c2*sinqt)
(2.6)
+
c2*sinqt)
(2.6)
c1, с2 – произвольные постоянные
c1*, c2* - линейные комбинации с1, с2
а)
p < 0, q ![]()
![]() 0
0
множитель
![]()
![]() стремится к 0 при t
стремится к 0 при t
![]()
![]()
![]()
![]() ,
а второй периодический множитель (2.6)
остается ограниченным.
,
а второй периодический множитель (2.6)
остается ограниченным.
Если p = 0, то траектории в силу периодичности замкнутые кривые, окружающие точку покоя (0, 0)

Наличие
множителя ![]()
![]() превращает замкнутые кривые в спирали,
асимптотически приближающиеся при t
превращает замкнутые кривые в спирали,
асимптотически приближающиеся при t
![]()
![]()
![]()
![]() к началу координат рис (1.11)
к началу координат рис (1.11)
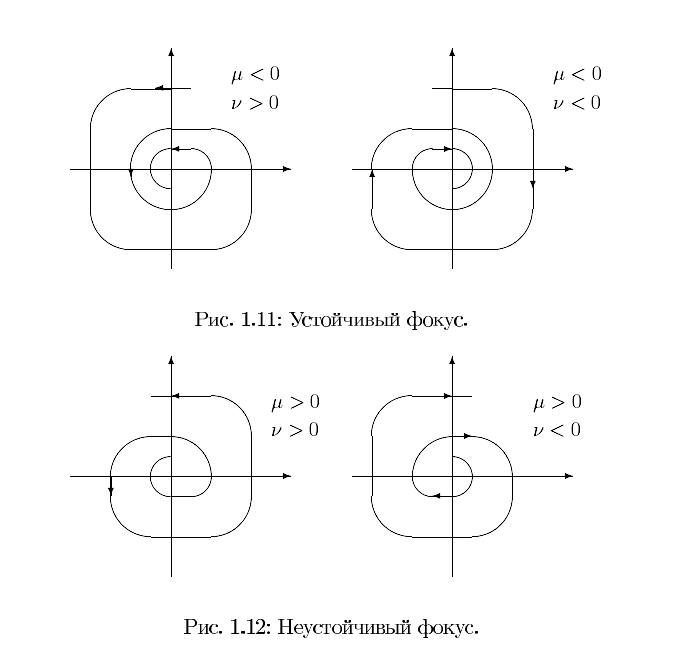
б)
p > 0, q ![]()
![]() 0
0
этот случай переходит в предыдущий при замене t на –t, движение происходит в противоположном направлении рис (1.12)
3. Корни ХАУРА кратные
л1 = л2
а) л1 = л2 < 0
Общее решение имеет вид
X =
Y
= ![]()
![]()
Так
как множитель ![]()
![]()
стремится
к 0 при t ![]()
![]()
![]()
![]() ,
точка асимптотически устойчива рис
(1.9)
,
точка асимптотически устойчива рис
(1.9)
Если
![]()
![]() =
=![]()
![]() = 0 то получаем устойчивый дикритический
узел рис (1.8)
= 0 то получаем устойчивый дикритический
узел рис (1.8)
Система имеет вид
![]()


б) л1 = л2 > 0
заменой t на –t приходим к предыдущему случаю
Замечание
Если detA = 0 (определитель), то у ХАУРА есть л1 = 0
Предположим
л1 = 0 л2 ![]()
![]() 0 тогда общее решение
0 тогда общее решение![]()
X =
Y
= ![]()
![]()
Исключая t получаем семейство кривых
![]()
![]() (y
–c1)=
(y
–c1)=![]()
![]() (x
–c1)
(x
–c1)
C2 = 0
![]()
![]() y
=x
y
=x
Если
![]()
![]() < 0, то при t
< 0, то при t![]()
![]()
![]()
![]() на каждой траектории точки приближаются
к лежащей на этой траектории точки
покоя. Точка покоя устойчива
на каждой траектории точки приближаются
к лежащей на этой траектории точки
покоя. Точка покоя устойчива

В этом случае система имеет вид
dy/dx = k
траектории прямые y = kx + c
4. Если л1 = л2 = 0
Положение равновесия вся фазовая плоскость
а) Общее решение
x = c1
y = c2
б) x = c1 + c2t
y = c1* + c2*t