

Базисные состояния и координаты
Координатное представление любого вектора (R) сводится к его изображению посредством линейной комбинации(ЛК) базисных векторов (e1, e2, ... , en):
R =R1 e1+R2 e2+ ... +Rn en .
Для этой конструкции употребляются также названия "суперпозиция базисных векторов" и "разложение по базису".
Координаты вектора (R1, R2, ... ,Rn) в заданном базисе показывают количественный вклад каждого базисного вектора в суммарный вектор. Поскольку при этом свойства базисных векторов предполагаются точно известными, знание координат позволяет предсказывать свойства вектораRбез проведения какого-либо специального исследования этих свойств.
При координатном представлении вектора состояния используется точно такой же прием:
любой кет-вектор может быть представлен в виде ЛК базисныхкет-векторов
| S = | 1 S1 + | 2 S2 + . . . = |iSi
любой бра-вектор может быть представлен в виде ЛК базисныхбра-векторов
D| =D11| +D22| + . . . = Dii|
В качестве координат векторов состояния выступают амплитуды некоторых событий, а именно:
каждое число типа Si =i|Sпредставляет собой амплитуду перехода частицы из начального состояния |Sв базисное состояние прибора-анализатора с номеромi;
каждое число типа Di =D|iпредставляет собой амплитуду перехода частицы из базисного состояния прибора-анализатора с номеромiв конечное состояниеD|.
При таком подходе бра- и кет-векторы, а также их координаты кажутся принципиально различными по смыслу, но эта разница не абсолютна. Одно и то же состояние Rможно рассматривать и как начальное — |R, и как конечное —R|. Точка зрения на состояние зависит от способа его анализа. Например, можно представить себе две экспериментальные ситуации, "устроенные" одинаково в пространственном отношении, но отличающиеся направлением движения частиц. Состояния, обозначаемые буквамиS иD,выступают здесь и как начальные, и как конечные.
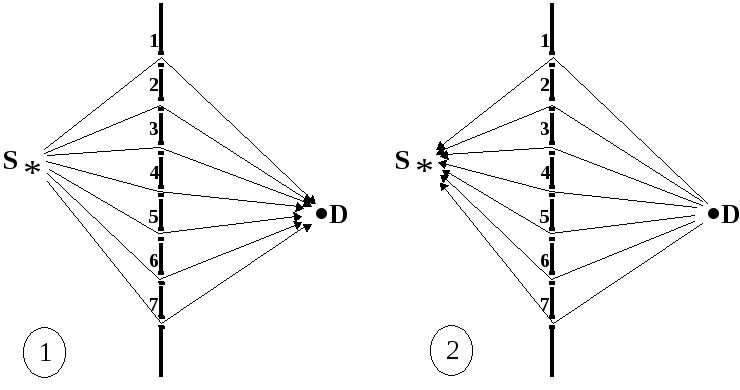
Перейти от ситуации (1) к ситуации (2) можно простым обращением знака пространственной (x) или временной (t) координаты, характеризующих перемещение частиц. При этом фаза каждой амплитуды изменит знак на противоположный:
= kx=t–= –kx= –t
Следовательно, координаты вектора состояния, соответствующие этим двум ситуациям, будут отличаться только одним — комплексным сопряжением. Например, для состояния Sбудем иметь:
Ситуация 1: |S= |1S1+ |2S2+ . . . =|iSi
D | = D1 1 | + D2 2 | + . . . = Di i |
Ситуация 2: S | = S1* 1 | + S2* 2 | + . . . = Si* i |
| D = | 1 D1* + | 2 D2* + . . . = | i Si*
Таким образом, любое состояние достаточно проанализировать только одним из возможных способов. Если мы знаем, как выглядит бра-вектор некоторого состояния, то мы автоматически знаем, как выглядит и егокет-вектор, и наоборот. Для перехода отбра-вектора ккет-вектору и обратно достаточно поменять все знаки в фазах амплитуд-координат. Для такой операции, включающей одновременное преобразование типа вектора (строкастолбец) и комплексное сопряжение его координат, применяют термин "эрмитово сопряжение" или просто "сопряжение" (обозначается значком+ ). Таким образом, для любого состояния можно записать:
| S=S|+и S| = |S+
| D=D|+и D| = |D+
Отсюда можно заключить, что целесообразно использовать какую-то одну универсальную методику анализа векторов любых состояний. В основе такой методики лежит использование спектральных анализаторов.