

Анализ векторов состояния
Пусть имеется частица, приготовленная в некотором определенном состоянии , которое нужно проанализировать и описать посредством векторной модели. Возьмем любой спектральный анализаторА и пропустим частицу через него. На выходе из прибора частица может оказаться в одном из вторичных пучков, т.е. перейти в некоторое определенное (по отношению к данному прибору) состояниеAi. Проведя множество повторных испытаний, мы сможем установить вероятность попадания частицы в любой из вторичных пучков и приписать этим событиям (попаданиям) соответствующие амплитуды.
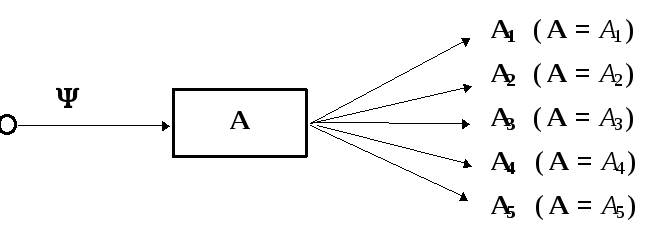
Будем рассматривать вторичные состояния, приготавливаемые прибором, как базисные. Тогда исходное состояние можно трактовать как суперпозицию (ЛК) базисных состояний:
| =а1|А1+а2|А2+ . . . =аi |А i
где в качестве координат выступают амплитуды:
аi =Аi|
Важным преимуществом такого подхода является то, что базисным состояниям и соответствующим амплитудам можно придать вполне определенный физический смысл:
каждое базисное состояние отличается тем, что в нем наблюдаемая Аимеет точно определенное значение (А=Аi),
координата вектора с номеромi (аi) представляет собой амплитуду того, что при измерении наблюдаемойАбудет найдено ее допустимое значение с тем же номеромi (Аi ), квадрат данной амплитуды представляет собой соответствующую вероятность: |аi |2=Pi.
Очевидно, что после прохождения прибора частица неизбежно попадет в один из вторичных пучков. Поэтому сумма вероятностей по всем вторичным пучкам будет обязательно равна 1:
| а1 |2+ |а2 |2+ . . . = |аi |2 = 1
В математике векторы, для которых выполняется такое условие (сумма квадратов координат равна 1), называются нормированными. Отсюда можно заключить, что все квантово-механические векторы состояния должны быть нормированными. Только в этом случае можно трактовать координаты вектора как амплитуды переходов в базисные состояния некоторого прибора, а их квадраты — как вероятности обнаружения соответствующих допустимых значений наблюдаемой.
Представления векторов состояния
Спектральных анализаторов, предназначенных для измерения наблюдаемых, существует много. Очевидно, что для анализа некоторого состояния мы можем воспользоваться любым из них. В каждом конкретном случае мы будем получать свой набор амплитуд-координат.
Прибор А:
| = |А1а1+ |А2а2+ ... = |Аi аi , гдеаi =Аi|
Прибор B:
| = |B1b1+ |B2b2+ ... = |Bibi , гдеbi =Bi|
Прибор C:
| = | C1 c1 + | C2 c2 + ... = | Ci ci , где ci = Ci |
Такие различные изображения одного и того же состояния, получаемые посредством различных приборов, называются представлениями.Другими словами, каждый вектор состояния может иметь множество различных представлений. Эти представления относятся к разным наборам базисных состояний (приборам) и поэтому характеризуются различными совокупностями амплитуд-координат.
Различие между представлениями вектора состояния точно такое же, как между представлениями геометрических векторов в различных системах координат. Так, на плоскости можно ввести множество координатных систем, причем координаты одного и того же вектора в разных системах будут различными:

Очевидно, что мы можем изобразить вектор Rдвояким способом:
R = Rx + Ry = x i + y j = ( x, y ) ( в базисе i, j )
R = Rf + Rg = f f + g g = ( f, g ) ( в базисе f, g )
Два разных набора чисел дают нам представление об одном и том же векторе, но с разных точек зрения. Следует обратить внимание на следующий факт: как один набор чисел — (x,y), так и другой — (f,g), дают нам определенные сведения о вектореR. Эти два набора чисел содержат одну и ту же информацию, они взаимозаменяемы, а не взаимодополняемы. Если нам известны два базиса, то координаты вектора, определенные по отношению к этим базисам, можно пересчитывать друг в друга без потери (но и без приобретения) информации.
Так, например, для двух декартовых координатных систем на плоскости, повернутых относительно друг друга на угол , действует правило:

Взаимно обратные матрицы, посредством которых один вектор-столбец (или вектор-строка) преобразуется в другой, называются "операторами преобразования координат".
Точно такая же ситуация имеет место и в квантовой механике. Мы можем анализировать одно и то же состояние с помощью разных приборов и получать в результате различные наборы координат. Каждый такой набор содержит исчерпывающую информацию о состоянии объекта. Представления, полученные с помощью разных приборов, могут быть однозначно преобразованы друг в друга с помощью матриц (операторов преобразования координат), которые в квантовой механике называются унитарными операторами.Такие операторные преобразования играют роль механических уравнений состояния, связывающих значения различных, но зависимых друг от друга наблюдаемых.