

Пример 6.2
Покажем, к чему приведет несоблюдение этого условия для объекта, который состоит из трех параллельных каналов.






 c
c
![]()






 u
u
![]() + y
+ y





![]() d
d
Рис. 6.6. Структурная интерпретация условия разрешимости
Определим для него передаточную функцию,
![]()
которую представим в виде
![]() . (6.14)
. (6.14)
Если здесь теперь полагать c = 0, то получим передаточную функцию,
![]()
которая при
выполнении условия типа (6.13): Re![]() {
{![]() (p)
= 0} < 0, принимает вид:
(p)
= 0} < 0, принимает вид:
![]() .
(6.15)
.
(6.15)
Наличие сокращаемого
множителя в числителе и знаменателе
функции (6.15) структурно означает появление
неуправляемой части: при c = 0 происходит
разрыв связи, и управление не действует
на звено с передаточной функцией ![]() ,
процессы в котором развиваются в силу
собственных свойств.
,
процессы в котором развиваются в силу
собственных свойств.
При d = 0 вместо (6.14) имеем
![]()
или при выполнении
условия: Re![]() {
{![]() (p)
= 0} < 0,
(p)
= 0} < 0,
![]() (6.16)
(6.16)
Это соответствует
наличию ненаблюдаемой части системы с
передаточной функцией ![]() которая не оказывает влияния на выход
системы.
которая не оказывает влияния на выход
системы.
При неустойчивой неуправляемой или ненаблюдаемой части объекта замкнутая система окажется неработоспособной.
6.3.4. Управляемость
Понятия управляемости и наблюдаемости имеют большое значения для линейных многоканальных систем.
Рассмотрим условие управляемости для объектов вида
![]() (6.17)
(6.17)
Объект (6.17) называется управляемым, если существует ограниченное управляющее воздействие u(t), которое переводит его из начального состояния x(0) в заданное конечное x(T) за конечное время T.
Проверяется это условие с помощью критерия управляемости. Объект (6.17) управляем тогда и только тогда, когда матрица управляемости
![]() (6.18)
(6.18)
имеет полный ранг.
Так как матрица U
имеет n
строк и (![]() )
столбцов, то критерий управляемости
записывается в виде
)
столбцов, то критерий управляемости
записывается в виде
r { U } = n . (6.19)
Определить, имеет ли матрица полный ранг, можно по соотношению:
det {
U ![]() }
}
![]() 0 .
(6.20)
0 .
(6.20)
Для одноканального объекта, когда m=1, критерий управляемости (6.19) принимает форму
det {
U } ![]() 0 .
(6.21)
0 .
(6.21)
В случае неуправляемого объекта с помощью невырожденного преобразования переменных,
z = M x
,
det
M
![]() 0
,
0
,
переходят к канонической форме управляемости (рис. 6.7).
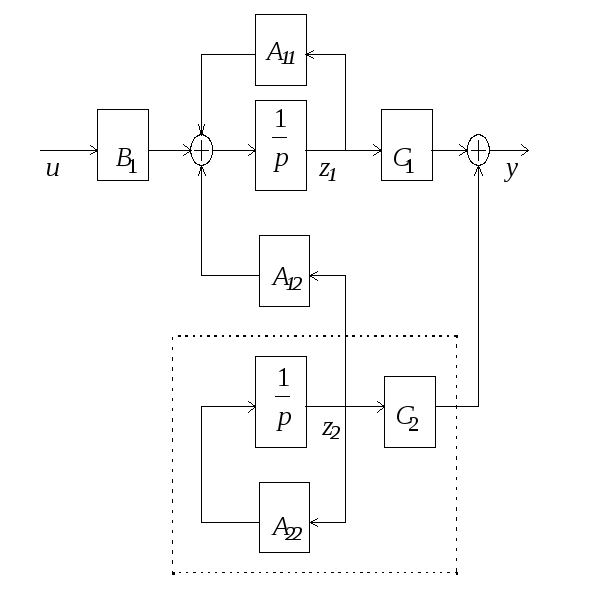
Рис. 6.7. Cтруктурная схема неуправляемого объекта
Уравнения объекта, записанные в канонической форме, имеют вид:
 (6.22)
(6.22)
где переменные ![]() характеризуют автономную часть объекта,
называемую неуправляемой. Однако, эта
часть влияет на выходные переменные,
что хорошо иллюстрирует схема, приведенная
на рис. 6.7.
характеризуют автономную часть объекта,
называемую неуправляемой. Однако, эта
часть влияет на выходные переменные,
что хорошо иллюстрирует схема, приведенная
на рис. 6.7.
Поскольку процессы в неуправляемой части развиваются в силу собственных свойств и изменить их невозможно, то в случае ее неустойчивости весь объект будет не только неустойчивым но и нестабилизируемым.
6.3.5. Наблюдаемость
Это понятие отражает возможность оценки переменных состояния объекта (6.17) по результатам измерения физических переменных.
Объект называется наблюдаемым, если в любой момент времени можно оценить его состояние x по данным измерения выходных переменных y(t) и управляющих воздействий u(t).
Условие проверяется с помощью критерия наблюдаемости. Объект (6.17) наблюдаем тогда и только тогда, когда матрица наблюдаемости
 (6.23)
(6.23)
имеет полный ранг, то есть
r { N } = n. (6.24)
Это условие можно проверить по соотношению:
det {
N ![]() }
}
![]() 0 .
0 .
В случае одноканального объекта критерий наблюдаемости (6.24) принимает вид
det {
N }![]() 0
.
(6.25)
0
.
(6.25)
Для ненаблюдаемого объекта существует невырожденная матрица преобразования M,
z = M x
, det
M
![]() 0
,
0
,
которая позволяет уравнения (6.17) записать в канонической форме наблюдаемости
 (6.26)
(6.26)
Здесь переменные
![]() характеризуют ненаблюдаемую часть
объекта, структурная схема которого
приведена на рис. 6.8.
характеризуют ненаблюдаемую часть
объекта, структурная схема которого
приведена на рис. 6.8.

Рис. 6.8. Структурная схема ненаблюдаемого объекта
Если ненаблюдаемая часть неустойчива, то с объектом работать нельзя.
Таким образом, условие разрешимости задачи синтеза - устойчивость ненаблюдаемой части объекта.