


5. Анализ переходных процессов
5.1. Введение
Работа системы автоматического управления помимо устойчивости оценивается рядом качественных показателей, основными из которых являются точность отработки входных воздействий и характер переходных процессов.
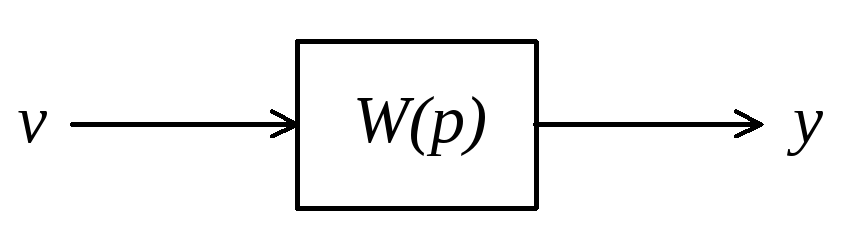
Рис. 5.1. К постановке задачи анализа
Вообще говоря, при известной математической модели и начальных условиях
![]()
![]() (5.1)
(5.1)
![]()
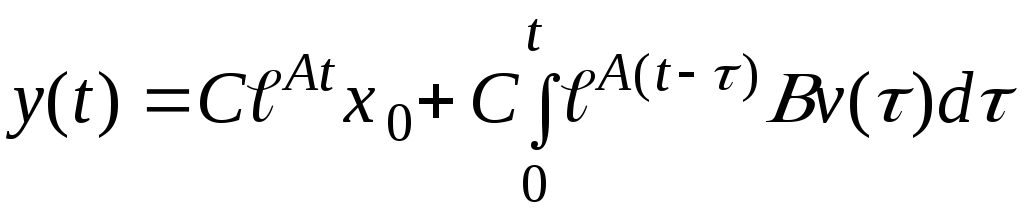
можно рассчитать переходные процессы, пользуясь соотношением:
 .
(5.2)
.
(5.2)
Здесь первое слагаемое есть реакция на начальные условия, второе - на входное воздействие.
Однако, напрямую для системы высокого порядка трудно вычислять y(t) по выражению (5.2); еще сложнее оценивать влияние отдельных параметров на качество переходных процессов.
Поскольку в реальных системах закон изменения действующих на объект возмущений и помех измерения заранее не известен, рассматривают реакцию САУ на некоторые типовые воздействия, близкие к реальным. Относительно тяжелым для отработки является единичное ступенчатое воздействие, и если удается обеспечить определенное качество при подобном входном сигнале, то система будет удовлетворительно работать и при других воздействиях.
О качестве работы САУ можно судить по косвенным признакам, которые называются показателями качества переходного процесса и определяются без непосредственного расчета переходного процесса.
5.2. Показатели качества переходного процесса
Рассмотрим одноканальную автоматическую систему стабилизации, для которой входное воздействие является постоянной величиной (v = const), а цель регулирования состоит в организации свойства:
lim y(t)
= v при
![]() .
(5.3)
.
(5.3)
Основными показателями качества таких систем являются характеристики переходного процесса.
5.2.1. Ошибка регулирования
Для оценки точности используется величина ошибки
![]() ,
(5.4)
,
(5.4)
которая с течением времени стремится к некоторому постоянному значению, называемому статической ошибкой:
![]() .
(5.5)
.
(5.5)
При известной структурной схеме системы ошибку можно определить в операторной форме с помощью структурных преобразований,
![]() (5.6)
(5.6)
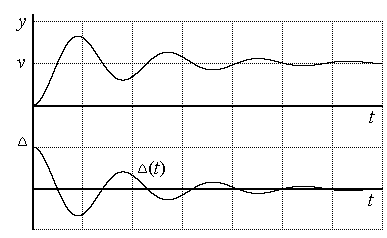
Рис. 5.2. Изменение ошибки во времени
В этом случае статический режим характеризуется тем, что p=0, а статическая ошибка находится по выражению
![]() (5.7)
(5.7)
Динамической ошибкой будем называть величину
![]() ,
(5.8)
,
(5.8)

причем ![]() .
.
Ошибка (статическая ошибка) является одной из основных количественных характеристик динамики системы.
5.2.2. Быстродействие
В качестве оценок быстродействия можно использовать различные величины, причем все они определяют время от начала процесса до какого-либо характерного значения. С этой целью рассмотрим переходную характеристику системы h(t).
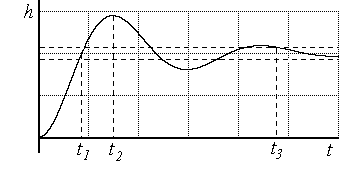
Оценками быстродействия могут служить:
 -
время от начала процесса до первого
момента достижения установившегося
значения
-
время от начала процесса до первого
момента достижения установившегося
значения  (справедливо только для колебательных
процессов);
(справедливо только для колебательных
процессов);Рис. 5.3. Иллюстрация оценок быстродействия
 -
время достижения первого максимума
(также возможно только для колебательных
процессов);
-
время достижения первого максимума
(также возможно только для колебательных
процессов); -
время от начала процесса до момента
достижения установившегося значения
-
время от начала процесса до момента
достижения установившегося значения
 со статической ошибкой
со статической ошибкой  не более заданной.
не более заданной.
На практике в
качестве оценки быстродействия чаще
всего используют величину ![]() ,
которую обычно обозначают как
,
которую обычно обозначают как ![]() и называют временем
переходного процесса.
и называют временем
переходного процесса.