

2.5 Определение тяговых сопротивлений и тяговый расчет в рабочем положении
Для машин с ротационными рабочими органами типов II, III суммарное тяговое сопротивление подсчитывают по формуле, (Н):
![]() (2.52)
(2.52)![]()
где FГ/ – сопротивление перемещению базовой машины;
F/PO – сопротивление перемещению ротационного рабочего органа;
Fо – сопротивление движению зачистного отвала;
F/Б – сопротивление движению бермообразователей;
F/З – сопротивление перемещению задней опоры.
![]() (2.53)
(2.53)
При
![]() ,
а
,
а![]() можно пользоваться приближенной
формулой, Н
можно пользоваться приближенной
формулой, Н
![]() ,
(2.54)
,
(2.54)
где GT – вес базовой машины (трактора), H (табл. П3, П4);
FA – вертикальная нагрузка от рабочего органа, приходящаяся на базовую машину, Н (рис. 2.8);
fм – коэффициент сопротивления движению базовой машины (табл. П7);
αу
– угол уклона поверхности грунта
относительно продольной оси канала,
(![]() ,
,![]() ).
).
![]() (2.55)
(2.55)
где Gно – вес навесного оборудования с рабочим органом, Н (для типов II и III Gно= (0,4÷0,6)GT; для типов I, IV, V, VI Gно= (0,2÷0,24)GT); Rн – суммарная радиальная составляющая сил сопротивления копанию грунта роторами (фрезами), Н:
![]() ,
(2.56)
,
(2.56)
Rк – суммарная касательная составляющая сил сопротивления копанию грунта роторами (фрезами), Н:
![]() (2.57)
(2.57)
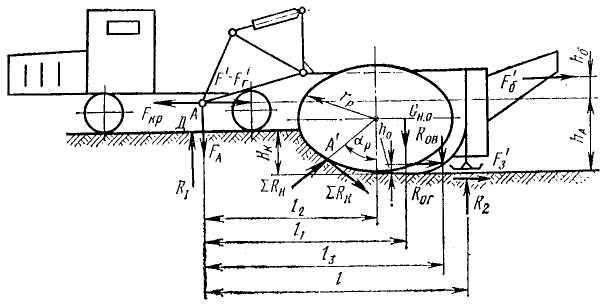
Рис. 2.8 Схема действующих сил к тяговому расчету машин с ротационными рабочими органами II и III типа
где Т – вращающий момент от сил резания грунта роторами, Н∙м;
dP – диаметр ротора (фрезы), м.
![]() (2.58)
(2.58)
где vOKP – окружная скорость, м/с;
Nро – мощность привода (определяется по формуле 2.22), кВт;
αР
– центральный угол, соответствующий
точке А'
приложения реакций Rн
и RК,
град (рис. 2.8). Одно из крайних значений
αр
можно определить из условия приложения
равнодействующей сил копания к фрезе
(ротору) на расстоянии
![]() – от поверхности грунта. Тогда
– от поверхности грунта. Тогда
![]() (2.59)
(2.59)
Рекомендуется
![]() принимать в пределах:
принимать в пределах:
![]() (2.60)
(2.60)
где
![]() ;
;
![]() – угол контакта фрезы (ротора) с забоем,
равный
– угол контакта фрезы (ротора) с забоем,
равный
![]() (2.61)
(2.61)
![]() –вертикальная
составляющая сил сопротивления копанию
зачистным отвалом, Н:
–вертикальная
составляющая сил сопротивления копанию
зачистным отвалом, Н:
![]() ,
(2.62)
,
(2.62)
где RОГ – горизонтальная составляющая сил сопротивления копанию зачистным отвалом, Н.
![]() (2.63)
(2.63)
где k1 – коэффициент удельного сопротивления копанию, кПа, (табл. П2);
R2 – вертикальная составляющая суммарной реакции грунта на заднюю опору, Н. Определяют из уравнения моментов сил относительно точки А (рис. 2.8).
 (2.64)
(2.64)
где
![]() ,
,![]()
![]()
![]() ,
,![]() ,
,![]() –
действующие силы, Н;
–
действующие силы, Н;
rP – радиус ротора, м;
l1, l2, l3, l, hо, hБ, hA – плечи действующих сил, м (определяют по чертежу общего вида каналокопателя, при отсутствии чертежа для приближенных расчетов можно воспользоваться ориентировочными соотношениями):
l = 2dp; l1 = 1,3dp; l2 = dp; l3 = 1,9dp; hо = 0,33HK ; hA = HK + hГ; hБ = 0,3hA;
hГ – высота гусеницы трактора, м (hГ = 0,8÷1,2).
Сопротивление движению бермообразователей (см. формулу 2.52):
![]()
где RБ – сопротивление копанию одним бермообразователем, Н:
![]() (2.65)
(2.65)
где
![]() – угол захвата, град,
– угол захвата, град,![]() =
20÷30°;
=
20÷30°;
Г – угол естественного откоса, град (табл. П1);
ε/
– угол отклонения линии выноса грунта
на вершину отвала (кавальера), град,
![]() ;
;
GПР
–
вес призмы волочения, Н,
![]() ;
;
![]() –удельный
вес грунта в естественном состоянии,
Н/м3;
–удельный
вес грунта в естественном состоянии,
Н/м3;
VПР – объем призмы волочения, м3:
![]() (2.66)
(2.66)
где
![]() –
ширина откоса кавальера, м,
–
ширина откоса кавальера, м,![]() ;
;
![]() –высота
кавальера, м:
–высота
кавальера, м:
![]()
где
![]() – площадь сечения разрабатываемого
канала, м2;
– площадь сечения разрабатываемого
канала, м2;
![]() –коэффициент
разрыхления грунта (см. табл. П1);
–коэффициент
разрыхления грунта (см. табл. П1);
![]() –толщина
срезаемого слоя, м,
–толщина
срезаемого слоя, м,
![]() (
(![]() – ширина бермы, м, равная 0,5÷0,7 м). Остальные
сопротивления, составляющие суммарное
тяговое сопротивление(
– ширина бермы, м, равная 0,5÷0,7 м). Остальные
сопротивления, составляющие суммарное
тяговое сопротивление(![]() ,формула
2.52), определяют по формулам:
,формула
2.52), определяют по формулам:
сопротивление перемещению ротационного рабочего органа
![]() (2.67)
(2.67)
сопротивление движению зачистного отвала
![]() ;
(2.68)
;
(2.68)
сопротивление движению задней опоры
![]() ,
(2.69)
,
(2.69)
где fм – коэффициент сопротивления передвижению задней опоры (табл. П6).
Возможность передвижения базовой машины в рабочем положении проверяют по условию сцепления с грунтом и крюковому усилию по формуле
![]() ,
(2.69)
,
(2.69)
где
![]() – сцепной вес машины, Н:
– сцепной вес машины, Н:
на
гусеничном ходу
![]()
на колесном ходу

где lБК – база колесного трактора;
GТ,
GНО
– силы тяжести базовой машины и навесного
оборудования, Н;
![]() –
плечи соответствующих сил относительно
оси задних колес, м;
–
плечи соответствующих сил относительно
оси задних колес, м;
∑R//B – вертикальная составляющая реакции ∑RB в плоскости перпендикулярной оси канала рис. 2.9, Н:
∑R//B = ∑RB∙sinαк, (2.70)
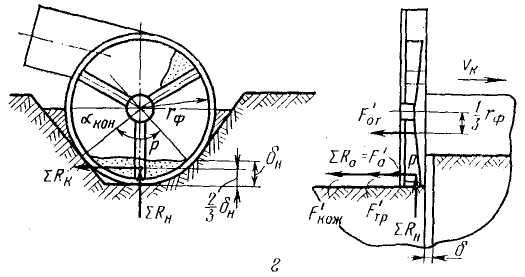
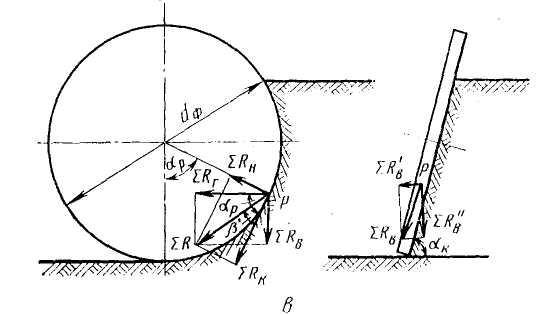
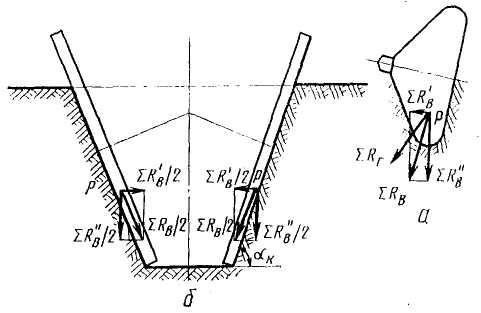
Рис. 2.9 Схемы реакций грунта действующих на ротационные рабочие органы: а – однофрезерные рабочие органы типа I; б – двухроторные, двухфрезерные рабочие органы типов II, III; в – однофрезерные рабочие органы типа IV; г – фрезерные рабочие органы каналоочистителей типа V
где ∑RB – вертикальная составляющая силы ∑R в плоскости фрезы (откоса) рис. 2.9, Н:
∑RB = ∑R∙sin(αp – β/), (2.71)
где ∑R – суммарная реакция грунта на рабочий орган типа I, II, III, IV, Н:
![]() (2.72)
(2.72)
αp – см. формулу 2.59;
β/ – угол рис. 2.9, равный:
![]() ,
→ β/
= arc
tgβ/,
(2.73)
,
→ β/
= arc
tgβ/,
(2.73)
где ∑Rк и ∑Rн определяют по формулам (2.56) и (2.57);
![]() –коэффициент
сцепления ходовой части базовой машины
с грунтом (см. табл. П6);
–коэффициент
сцепления ходовой части базовой машины
с грунтом (см. табл. П6);
![]() –коэффициент
сопротивления передвижению базовой
машины (табл. П6);
–коэффициент
сопротивления передвижению базовой
машины (табл. П6);
![]() ,
(
,
(![]() –
угол уклона, град,
–
угол уклона, град,![]() =
6°);
=
6°);
![]() – максимальное
усилие на крюке (свободное тяговое
усилие) машины во время работы (см. усилие
на первой передаче* табл. П3, П4).
– максимальное
усилие на крюке (свободное тяговое
усилие) машины во время работы (см. усилие
на первой передаче* табл. П3, П4).
В случае невыполнения условия (2.69) подбирают другую базовую машину и делают перерасчет.
Для ротационных рабочих органов типа I, IV суммарное тяговое сопротивление (Н) определяют по формуле:
![]() ,
(2.74)
,
(2.74)
где
сопротивления
![]() и
и
![]() вычисляют аналогично методике определения
этих составляющихдля
ротационных рабочих органов типов
II
и III
(см. формулы 2.53÷2.67).
вычисляют аналогично методике определения
этих составляющихдля
ротационных рабочих органов типов
II
и III
(см. формулы 2.53÷2.67).
Суммарное тяговое сопротивление для ротационных рабочих органов типов V и VI находят по формуле
![]() (2.75)
(2.75)
где
![]() – сопротивление перемещению машины на
колесном или гусеничном ходу, Н;
– сопротивление перемещению машины на
колесном или гусеничном ходу, Н;
![]() –сопротивление
перемещению рабочего органа, Н;
–сопротивление
перемещению рабочего органа, Н;
![]() – сопротивление
от трения поверхности кожуха рабочего
органа о грунт, Н;
– сопротивление
от трения поверхности кожуха рабочего
органа о грунт, Н;
![]() – сопротивление
резанию грунта передним краем кожуха,
Н;
– сопротивление
резанию грунта передним краем кожуха,
Н;
![]() – сопротивление
копанию грунта боковыми открылками
кожуха, вырезающими часть сечения
наносов, Н.
– сопротивление
копанию грунта боковыми открылками
кожуха, вырезающими часть сечения
наносов, Н.
Ниже приводятся формулы для определения этих сопротивлений.
При рабочем перемещении ротора принимают, что половина веса навесного оборудования приходится на грунт, тогда:
![]() ,
(2.76)
,
(2.76)
где
![]() –
сила тяжести базовой машины (табл. П3 и
П4);
–
сила тяжести базовой машины (табл. П3 и
П4);
![]() –
сила
тяжести узлов навесного оборудования
(см. формулу 2.55).
–
сила
тяжести узлов навесного оборудования
(см. формулу 2.55).
![]() ,
(2.77)
,
(2.77)
где
![]() –
число ножей-лопаток, находящихся в
забое;
–
число ножей-лопаток, находящихся в
забое;
![]() – сопротивление
перемещению при копании грунта
одним ножом-лопаткой, Н:
– сопротивление
перемещению при копании грунта
одним ножом-лопаткой, Н:
![]() (2.78)
(2.78)
где![]()
![]() –
коэффициент удельного сопротивления
копанию грунта (см. табл. 2.1, формула
2.46);
–
коэффициент удельного сопротивления
копанию грунта (см. табл. 2.1, формула
2.46);
![]() –толщина
слоя наносов, м;
–толщина
слоя наносов, м;
![]() –подача
на один нож, м, формула 2.8;
–подача
на один нож, м, формула 2.8;
![]() –угол
подачи ножа-лопатки в грунт, град
(рис. 2.7):
–угол
подачи ножа-лопатки в грунт, град
(рис. 2.7):
![]()
![]() (2.79)
(2.79)
где
![]() – суммарная радиальная составляющая
сил сопротивления копания грунта фрезой,
определяется по формулам (2.55), (2.56),
(2.57), принимая
– суммарная радиальная составляющая
сил сопротивления копания грунта фрезой,
определяется по формулам (2.55), (2.56),
(2.57), принимая![]() ;
;
![]() –
коэффициент
трения поверхности кожуха о грунт,
(табл. П1).
–
коэффициент
трения поверхности кожуха о грунт,
(табл. П1).
![]() (2.80)
(2.80)
где
![]() – длина погруженной части кожуха, м
(см. рис. 2.7);
– длина погруженной части кожуха, м
(см. рис. 2.7);
![]() –толщина
сечения стенки кожуха, м, принимается
конструктивно (0,005÷0,007 м);
–толщина
сечения стенки кожуха, м, принимается
конструктивно (0,005÷0,007 м);
![]() –удельное
сопротивление резанию передней частью
кожуха,
–удельное
сопротивление резанию передней частью
кожуха,
![]() = 49÷59
кПа.
= 49÷59
кПа.
![]() (2.81)
(2.81)
где
![]() – площадь сечения стружки грунта,
срезаемой открылками, м2
(рис. 2.7), определяется по чертежу (или
приближенно,
– площадь сечения стружки грунта,
срезаемой открылками, м2
(рис. 2.7), определяется по чертежу (или
приближенно,
![]() );
);
![]() –удельное
сопротивление копанию, принимается как
для бульдозеров
–удельное
сопротивление копанию, принимается как
для бульдозеров
![]() кПа.
кПа.
Правильность выбора базовой машины проверяют по условию сцепления с грунтом, усилию на крюке по формуле (2.69).