

2 Практическое занятие – 10ч расчет ротационных рабочих органов каналокопателей и каналоочистителей
2.1 Общие сведения
Можно выделить шесть типов ротационных рабочих органов (рис. 2.1): I – однофрезерный (копирующая фреза) с осью вращения, перпендикулярной к направлению движения машины и оси канала; II – двухфрезерный, с осью вращения, перпендикулярной откосу; III – двухроторный, с осью вращения, перпендикулярной откосу; IV – однофрезерный, с осью вращения, перпендикулярной откосу; V – однофрезерный, с осью вращения, параллельной направлению движения машины и оси канала; VI – однофрезерный, с осью вращения, наклонной к оси канала и горизонту.
Схемы расположения рабочих органов в разрабатываемом канале для указанных выше типов машин представлены на рис. 2.2. Режущие элементы (ножи) рабочих органов показаны на рис. 2.3: тип III имеет ножи а, II и IV – б, в, г, I – д, V – е и VI – ножи ж. Основные параметры сечения канала рис. 2.4.
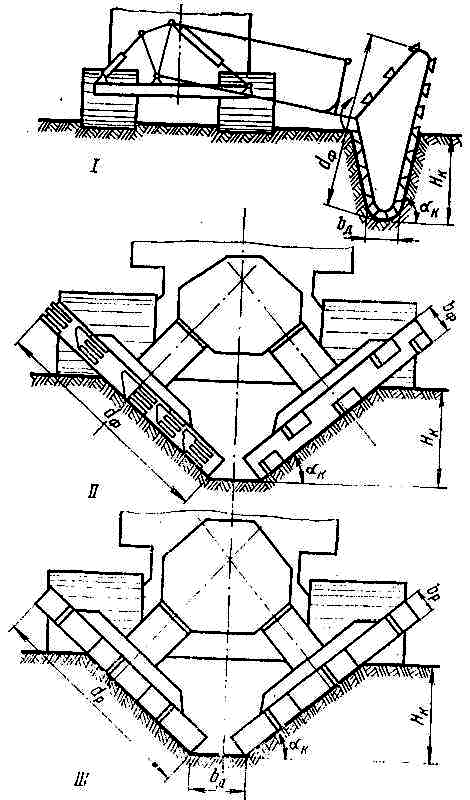
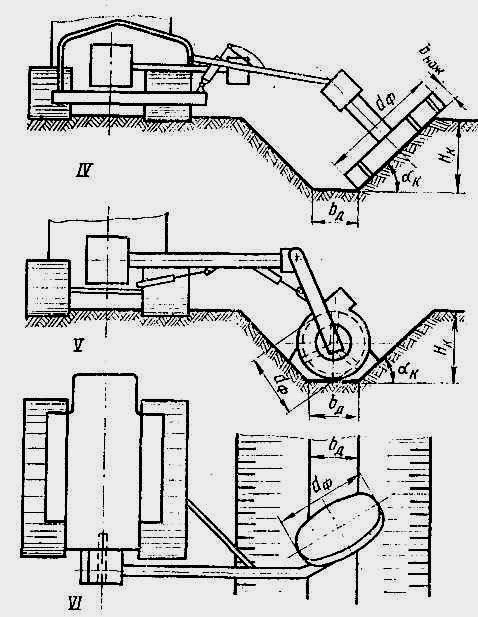
Рис. 2.1 Типы рабочих органов и схемы их навески на базовую машину:
Ι – копирующая фреза; ΙΙ – двухфрезерный; ΙΙΙ – двухроторный (с гравитационной разгрузкой); IV – однофрезерный (однороторный) с осью вращения, перпендикулярной откосу; V – однофрезерный с осью вращения, параллельной оси канала; VI – однофрезерный с осью вращения, наклонной к осп канала и горизонту
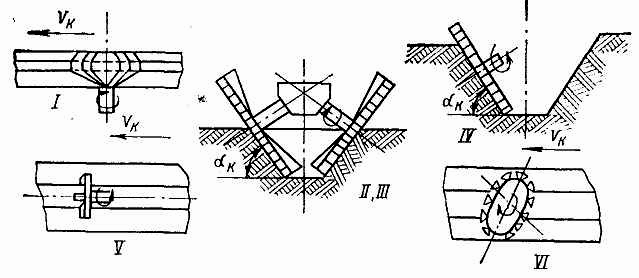
Рис. 2.2 Схема расположения различных типов рабочих органов в канале
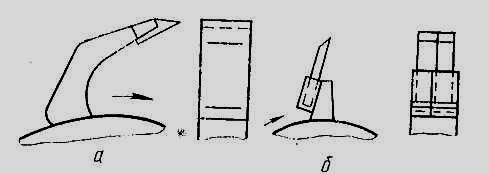
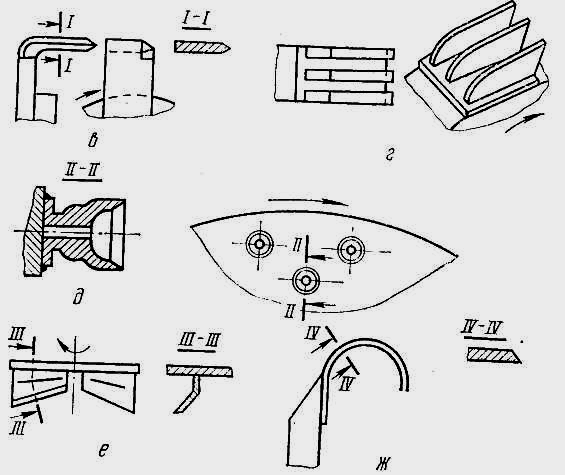
Рис. 2.3 Ножи:
а – нож-ковш; б – прямой; в – г-образный; г – прямой гребенчатый; д – чашечный; е – нож-лопасть; ж – полукруглый
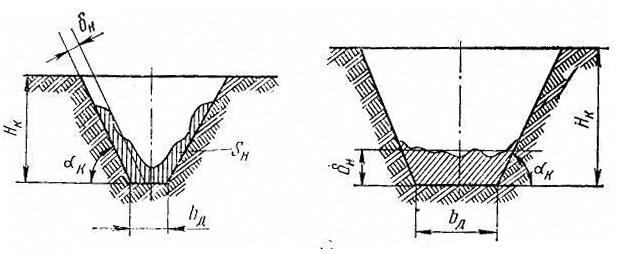
Рис. 2.4 Основные параметры сечения канала:
Нк – глубина канала; bд – ширина по дну; αк – угол наклона откоса; δн – толщина наносов; SН – площадь наносов
2.2 Выбор основных параметров роторов с гравитационной разгрузкой
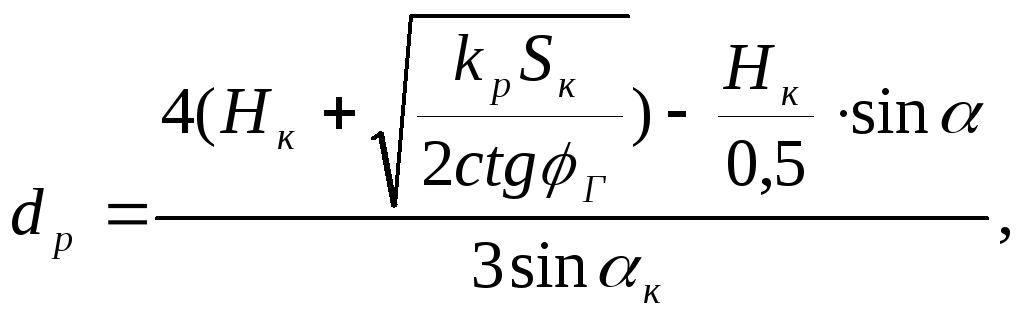
Диаметр ротора (тип III) по зубьям каналокопателя находят по формуле, (м):
 (2.1)
(2.1)
где Hк – глубина канала, м;
kp – коэффициент разрыхления грунта (табл. П1);
φг – угол естественного откоса насыпного грунта (табл. П1), град, (φг = arctg fг, fг – коэффициент трения грунта по грунту, табл. П1);
αк – угол наклона откоса канала к горизонту, град;
SК – площадь поперечного сечения канала, м2:
![]() ,
(2.2)
,
(2.2)
где bд – ширина канала по дну, м.
Диаметр ротора без зубьев do можно принять из соотношения:
![]()
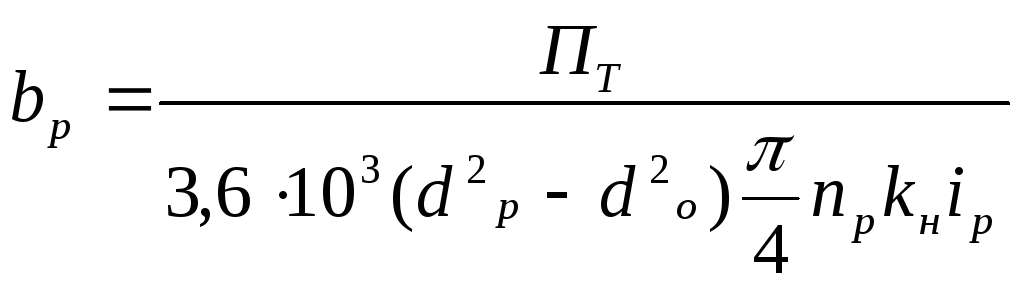
Ширина ротора, (м):
 ,
(2.3)
,
(2.3)
где ПТ – техническая производительность, м3/ч;
kн – коэффициент заполнения рабочего пространства ротора, ограниченного dр и do, kн = 0,52÷0,55;
ip – число роторов;
np – частота вращения ротора, с-1:
![]() .
(2.4)
.
(2.4)
Ширина ротора должна удовлетворять условию размещения роторов в канале:
![]() (2.5)
(2.5)
Окружня скорость vокр ротора (в пределах 2÷4 м/с):
![]() (2.6)
(2.6)
где х – опытный коэффициент, (х = 0,4÷0,8);
rp
–
радиус ротора, м,
(![]() );
);
g – ускорение свободного падения.
Рабочая скорость перемещения рабочего органа, (м/с):
![]() ,
(2.7)
,
(2.7)
где SК – площадь поперечного сечения канала, м2.
Направление вращения ротора (фрезы), как правило, принимают прямое (рис. 2.5).
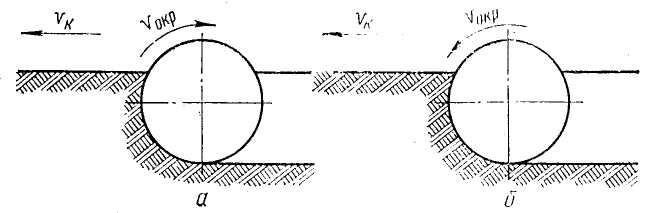
Рис. 2.5 Направления вращения роторов (фрез): а – прямое; б – обратное
Толщина стружки (подача на один нож, м) δ:
![]() (2.8)
(2.8)
где vK – скорость перемещения рабочего органа, м/с;
zн – число ножей по окружности рабочего органа в каждом ряду, в плоскости перпендикулярной оси вращения. Число ножей или ковшей принимают zн = 8÷12 шт. (при dp=2÷4м).
Подача на один нож для роторов и фрез составляет δ = 0,005÷0,06 м.