

913
.pdfКлючевые слова: эксплуатационные факторы, подшипники качения, момент сил трения, коэффициент трения, динамическая нагрузка, угловая скорость вращения.
Постановка проблемы. Анализ эксплуатационных особенностей подшипников качения позволяет сделать некоторые выводы, которые следует учитывать при выборе типа подшипников и оптимальных условий его работы. По данным теории теоретической механики [1, 2, 3], коэффициент трения качения зависит от деформации поверхностей тел, участвующих в процессе качения. При увеличении радиального усилия на тело качения коэффициент трения возрастает. При наличии зазоров в подшипнике вал находится в колебательном вращении, что не может не отразиться на работе подшипниковых узлов. Известно, что совпадение собственных частот колебания и вынужденных колебаний вала приводит к резонансным колебаниям вала. Возникающие при этом динамические нагрузки приводят к значительному увеличению коэффициента трения качения. Для получения данных по изменению коэффициента трения в подшипниках качения, необходимо исследовать переходные режимы их работы в процессе эксплуатации.
Т Т · 0,1Нм Т Т · 0,1Нм
Q,кН |
Q,кН |
1 |
2 |
ТТ · 0,1Нм
ТТ · 0,1Нм
Q,кН |
Q, кН |
3 |
4 |
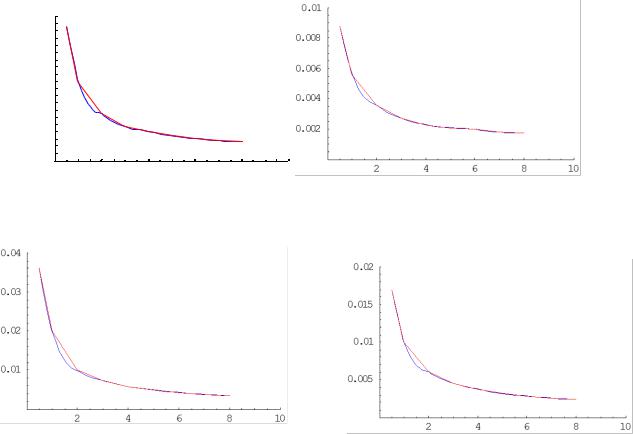
Рисунок 1 ‒ Зависимость момента трения Т Т от нагрузки Q, уровня смазки
и частоты вращения: 1 ‒ со смазкой, 1000 мин 1 ; 2 ‒ без смазки, 1000 мин 1 ; 3 ‒ со смазкой, 2000 мин 1 ; 4 ‒ без смазки, 2000 мин 1
311
Материалы и методы. Исследование проводилось на подшипнике 1208, у которого динамическая нагрузка составляет С=15600Н. На лабораторном стенде ДМ-28 подшипник испытывался при различной нагрузке до 0,5 С с уровнем смазки до центра шарика и без смазки, частота вращения вала n1 1000мин 1 и n2 2000мин 1 . Эти факторы позволяют оценить влияние основных эксплуатационных показателей на коэффициент трения, определить оптимальные режимы эксплуатации подшипниковых узлов, участвующих в работе приводов машин, и уменьшить эксплуатационные затраты.
В результате испытаний получены зависимости момента и коэффициента трения, представленные на рис. 1 и 2.
Видно, что с увеличением задаваемой нагрузки в данном интервале коэффициент трения уменьшается, так как амплитуда и частота колебаний вала, а следовательно и динамические силы, уменьшаются, что и приводит к снижению коэффициента трения.
f |
|
|
|
|
f |
0.02 |
|
|
|
|
|
0.015 |
|
|
|
|
|
0.01 |
|
|
|
|
|
0.005 |
|
|
|
|
|
2 |
4 |
6 |
8 |
10 |
|
|
|
|
|
Q,кН |
Q,кН |
|
|
1 |
|
|
2 |
f
|
Q,кН |
Q,кН |
3 |
f |
4 |
Рисунок 2 ‒ Зависимости коэффициента трения Т Т |
от нагрузки Q, уровня смазки |
|
и частоты вращения: 1 ‒ со смазкой, 1000 мин 1 ; 2 ‒ без смазки, 1000 мин 1 ; 3 ‒ со смазкой, 2000 мин 1 ; 4 ‒ Ббез смазки, 2000 мин 1
При заданной нагрузке до 15 % от допускаемой, трение в подшипнике зависит от снижения в суммарной нагрузке динамической составляющей, а не увеличения статической. Кроме этого, для подшипников качения наличие смазки и возрастание
312
частоты вращения вала увеличивает сопротивление в подшипниках, что согласуется с теорией трения качения.
Результаты исследований. Основные причины увеличения коэффициента качения следующие: при небольшой загруженности вала возникают значительные динамические нагрузки, которые и определяют процесс деформаций в подшипниках;
-при увеличении частоты вращения вала скорость деформации возрастает;
-при значительном количестве смазки в подшипнике увеличивается плотность среды и возникает масляный клин.
Экспериментальные зависимости апроксимированы по способу наименьших квадратов полиномом вида:
f a0 a1 X a2 X 2 a3 X 3 ,
где f ‒ коэффициент трения в подшипнике качения; X ‒ радиальная нагрузка на подшипник, Н;
a0 , a1 , a2 , a3 ‒ постоянные коэффициенты полинома.
Графики полученных эмпирических зависимостей представлены на рис. 2.
Выводы
1.При небольших нагрузках происходит резкое увеличение коэффициента трения в подшипниках до 10 раз, что делает режим их работы в этом диапазоне нагрузок нецелесообразным.
2.Оптимальный нижний предел режима нагружения подшипника составляет не менее 25…30 % от номинальной.
3.Увеличение нагрузки на подшипник должно сопровождаться снижением его частоты вращения.
4.Уровень смазки в нижней части подшипника не должен превышать окружности центров шариков или роликов.
Список литературы
1.Гулиа, Н. В. Детали машин: учебник / Н. В. Гулиа, В. Г. Клоков, С. А. Юрков. ‒ 3-е изд., стер. ‒ Санкт-Петербург: Лань, 2021. ‒ 416 с. ‒ // Лань: электронно-библиотечная система
[сайт]. ‒ URL: https://e.lanbook.com/book/168502 (дата обращения 04.04. 2022). ‒ Режим доступа:
для авториз. пользователей. ‒ Текст: электронный.
2.Детали машин /П.А. Андриенко, Б.А. Байков, И.К. Ганулич [и др.]; ред. О.А. Ряховский. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. - 543с.
3.Трение, износ и смазка (трибология и триботехника) /А.В. Чичинадзе, Э.М. Берлинер, Э.Д. Браун [и др.]; ред. А.В. Чичинадзе. ‒ М.: Машиностроение, 2003. ‒ 575 с.
4.Юдин, М.И. Планирование эксперимента и обработка его результатов./ М.И. Юдин. - Краснодар: КГАУ, 2004. – 238 с.
5.Яблонский, А.А. Курс теоретической механики: Статика. Кинематика. Динамика/ А.А. Яблонский, В.М. Никифорова. - 8-е изд., стер.- СПб. : Лань, 2001. – 768 с.
313
УДК 62-82
О ПЕРСПЕКТИВНЫХ СХЕМАХ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ
А.П. Миллер
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия ФГАОУ ВО ПНИПУ, г. Пермь, Россия
E-mail: aleksandrmillera@mail.ru
Аннотация. В статье представлена гидравлическая схема привода с возможностью рекуперации энергии. Эффективное управление такой системой, обеспечивающее энергоэффективность, является сложной задачей, решить которую можно за счет применения контроллеров под управлением нейронной сети.
Ключевые слова: гидравлическая система, энергоэффективность, рекуперация, управление гидравликой, гидравлический привод.
Постановка проблемы. В настоящее время гидравлический привод имеет широкое распространение в автомобилестроении, в том числе при изготовлении навесного оборудования транспортно-технологических машин [1‒2]. В отличие от других разновидностей привода, гидравлическая система характеризуется низкой энергоэффективностью, в том числе из-за наличия гидравлических и объемных потерь. Поэтому сокращение потребления энергии является актуальной задачей для исполнительных механизмов с гидравлическим приводом [3].
Второй важной задачей является улучшение характеристик слежения и управления гидравлической системой с учетом трудностей, возникающих из-за сложных процессов течения жидкости. Решить обе задачи можно за счет автоматизированного управления с применением аппаратного обеспечения. Как правило, наиболее неэффективным элементом гидравлической системы является дроссель, т.к. регулирование основано на рассеивании энергии. Для достижения эффекта энергосбережения во время работы гидросистемы целесообразно управлять насосом, чувствительным к нагрузке. Кроме того, в составе гидравлической системы необходимо предусмотреть обратную связь в виде электрогидравлического датчика давления. Хотя вышеупомянутые методы могут обеспечить удовлетворительный эффект энергосбережения, пропускная способность системы намного ниже, чем у системы с клапанным управлением, из-за высокой инерции. Поскольку пропускная способность системы имеет большое значение, система с управлением насосом уступает системе с управлением клапаном в этом отношении [4]. Кроме того, следует учитывать и высокую стоимость установки такого рода систем.
Альтернативным вариантом является система, состоящая из насоса постоянного объема, с регулированием давления подачи предохранительным клапаном. Управление клапаном необходимо осуществлять при помощи контроллера для повышения эффективности системы [5]. Кроме того, для робота с гидравлическим приводом был разработан контроллер на основе прогнозирования нагрузки, чтобы повысить энергосбережение системы. Несмотря на то, что вышеупомянутый контроллер может значительно снизить потребление энергии, он не работает на рекуперации потенциальной энергии. Многочисленное гидравлическое оборудование, такое как вибростенд, подвеска с реге-
314
нерацией энергии, машина для ковки и гидравлический пресс, характеризуется вертикальным возвратно-поступательным движением. Если гравитационная потенциальная энергия не используется должным образом, это приведет к большому потреблению энергии. Для решения этой проблемы вводится метод независимого измерения. В частности, энергосберегающее адаптивное управление гидроманипулятором с использованием пяти патронных клапанов и гидроаккумулятора.
Материалы и методы. Минимизировать потребление энергии при условии обеспечения производительности возможно при правильной конфигурации оборудования и алгоритме управления. Таким образом, учет большого количества характеристик рабочей жидкости возможен за счет применения нейронной сети.
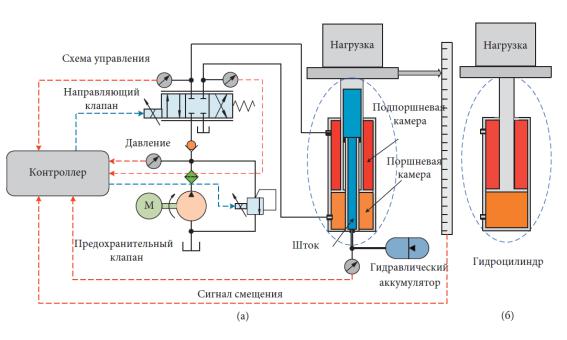
Упрощенная схема предлагаемой системы изображена в левой части рисунка а, а традиционный двухкамерный гидравлический привод представлен на рисунке б.
Рисунок ‒ Упрощенная схема предлагаемой гидравлической системы с прямым приводом и рекуперацией энергии (а) и традиционного двухкамерного гидравлического привода (б)
Результаты исследований. Предлагаемый исполнительный механизм содержит три рабочие камеры, которые являются поршневой камерой, штоковой камерой и камерой хранения. Накопительная камера соединена с гидравлическим аккумулятором таким образом, чтобы непосредственно обеспечивать рекуперацию и высвобождение энергии. В частности, когда привод убирается, потенциальная энергия массового груза преобразуется в гидравлическую энергию аккумулятора через камеру хранения. Кроме того, накопитель высвободит накопленную энергию, чтобы помочь системе на этапе подъема. Хотя существует много исследований, касающихся восстановления энергии на основе гидравлических аккумуляторов, требуется преобразование энергии или переходное звено, такое как гидравлический трансформатор, следовательно, часть энергии будет потрачена впустую. Первые две камеры соединены с контуром регулирования давления подачи, который в основном состоит из пропорционального направляющего клапана, предохранительного клапана и насоса фиксированного объема. Следователь-
315
но, насосу необходимо только обеспечивать постоянное давление в течение всего рабочего процесса.
В идеальном варианте, не учитывая потери на трение, усилие, создаваемое гидроаккумулятором, может уравновесить вес груза. Соответственно, давление подачи может быть очень небольшим либо на стадии втягивания, либо на стадии подъема. Однако это практически невозможно, поскольку давление гидроаккумулятора постоянно меняется, и оно не может точно соответствовать нагрузке.
Выводы и предложения. Если общая движущая сила, обеспечиваемая системой, точно уравновешивает нагрузку, привод будет двигаться с постоянной скоростью. Это означает, что несоответствие между усилием, создаваемым гидроаккумулятором, и силой тяжести груза компенсируется насосом. Поскольку эта часть энергии используется только для балансировки, а не для приведения исполнительного механизма в движение по заданной траектории, это рассматривается как рассеивание энергии. Таким образом, цель оптимизации состоит в том, чтобы максимально сократить потери энергии, для этого нейронной сети необходимо обрабатывать данные:
‒о нижнем пределе объема гидроаккумулятора;
‒верхнем пределе объема гидроаккумулятора;
‒геометрических размерах цилиндра;
‒весе груза;
‒положении поршня цилиндра.
Давление насоса в статичной гидравлической системе обычно является постоянной величиной, в то время как наличие динамических нагрузок (разгон/торможение) постоянно меняет величину давления. Таким образом, можно аккумулировать запас энергии насосом и давлением на входе. Несмотря на то, что традиционная система измерения нагрузки может значительно повысить эффективность системы, такие дефекты, как шум измерения, задержка отклика, колебания давления и проблемы со стабильностью, нельзя игнорировать.
Решить указанные проблемы можно за счет применения надежного контроллера, работающего под управлением нейронной сети.
Дальнейшие исследования будут направлены на проработку алгоритмов работы контроллера под управлением нейросети.
Список литературы
1.Мальцев, Д. В. Повышение эффективности эксплуатации кузовных мусоровозов: монография / Д. В. Мальцев, Е. М. Генсон. – Пермь: ИПЦ Прокростъ, 2019. – 144 с. – ISBN 978- 5-94279-441-5.
2.Филькин, Н. М. Надежность унифицированной машины технологического электротранспорта в период ее нормальной эксплуатации / Н. М. Филькин, Р. Ф. Шаихов // Автоматизация технологических процессов механической обработки, упрочнения и сборки в машиностроении: сборник научных статей международной научно-технической конференции, Курск, 03–05 ноября 2016 года. – Курск: Юго-Западный государственный университет, 2016. – С. 311-315.
3.Основы конструкции автомобилей: Шасси. Трансмиссия / В. В. Лянденбурский, Р. Ф. Шаихов, В. М. Пономарев, Г. И. Шаронов. – Пенза: Изд-во ПГУАС: Пензенский государственный университет архитектуры и строительства, 2014. – 228 с. – ISBN 978-5-9282-1101-1.
4.Особенности конструктивных решений размещения и обслуживания накопителей энергии унифицированной машины технологического электротранспорта / Н. М. Филькин, С. А. Зыков, Р. Ф. Шаихов, А. М. Татаркин // Транспорт на альтернативном топливе. – 2018. –
№4(64). – С. 49-55.
316
5. Шибаев Е. В. Диагностирование форсунок по величине тока электромагнитного клапана во время впрыска / Е. В. Шибаев, Р. Ф. Шаихов // Проблемы функционирования систем транспорта: Материалы Всероссийской (национальной) научно-практической конференции студентов, аспирантов и молодых ученых, Тюмень, 07–09 декабря 2021 года / Отв. редактор П.В. Евтин. – Тюмень: Тюменский индустриальный университет, 2022. – С. 178-182.
УДК 62-82
ПРИМЕНЕНИЕ НЕЙРОННЫХ СЕТЕЙ В ГИДРАВЛИЧЕСКОМ ПРИВОДЕ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ
А.П. Миллер
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия ФГАОУ ВО ПНИПУ, г. Пермь, Россия
E-mail: aleksandrmillera@mail.ru
Аннотация. В статье представлена работа нейронной сети для технической диагностики гидросистемы при её работе.
Ключевые слова: гидравлическая система, энергоэффективность, рекуперация, управление гидравликой, гидравлический привод.
Постановка проблемы. Нейронная сеть ‒ это компьютерная программа, которая выстраивает зависимости между входными данными и выходными без определенного математического алгоритма, а также обладает способностью к обучению. Благодаря этим особенностям, нейросеть может по некоторому набору исходных данных определять текущее состояние сложных систем и управлять ими. К примеру, состояние гидравлического привода исполнительных механизмов транспортно-технологических машин, таких как, например, крано-манипуляторные установки, характеризуется большим количеством параметров рабочей жидкости, поднимаемого груза, геометрических размеров манипулятора. Для эффективного управления с минимальными затратами энергии необходимо оценивать эти параметры с высокой частотой и управлять состоянием гидравлической системы, с чем может справиться нейронная сеть.
В настоящее время разработка нейронных сетей с, одной стороны, существенно упростилась, с другой ‒ вычислительные мощности позволяют создавать сложные модели, которые хотя бы немного по качеству решений приближаются к работе человекаоператора, но с гораздой более высокой частотой. Внутреннее строение нейронных сетей можно разделить на системы с прямой и обратной связью, однослойных, т.е. имеющих только входной и выходной слой, а также многослойных. В многослойных сетях между входным и выходным слоем может быть в принципе сколько угодно промежуточных слоев, однако между их количеством и качеством работы сети нет линейной зависимости, поэтому настройка сети ‒ это отдельная сложная задача. Несмотря на возросшие вычислительные мощности компьютеров, применение нейросетей на транс- портно-технологических машинах вынуждает решать задачу оптимальной производительности при удовлетворительном качестве принимаемых решений.
Кроме различной архитектуры, нейронные сети еще отличаются способом работы. Первый подход связан с заданием случайного веса связей между нейронами, второй
317
заключается в использовании функции активации случайного нейрона. Но ни один из упомянутых выше методов на самом деле не может выявить случайные особенности топологии структуры нейронной сети. Самообучение является важной характеристикой нейронной сети, при накоплении большого количества данных сеть сможет улучшить качество своей работы.
Материалы и методы. В настоящее время широко применяются гидравлические системы, управляемые клапанами с электроприводом, они обладают такими характеристиками, как большая выходная мощность, быстродействие и высокая точность [1, 2], а к недостаткам таких систем можно отнести низкую надежность из-за высокой чувствительности к качеству и чистоте рабочей жидкости, низкий КПД из-за гидравлических и объемных потерь, требования к точности изготовления деталей, а также требования к качеству уплотнений. Нейросеть за счет эффективного управления может увеличить энергоэффективность таких систем за счет снижения потерь энергии внутри гидропривода. Например, некоторые насосы, такие как аксиально-поршневые и ради- ально-поршневые, могут регулироваться не только за счет изменения оборотов вращения приводного двигателя, но и за счет изменения угла наклона диска. Таким образом, управляя подачей насоса можно в каждый момент времени выбирать наиболее оптимальный режим работы. Благодаря высокой эффективности, простоте в эксплуатации и большому выходному усилию такого рода системы нашли применение во многих областях промышленности, в том числе привод исполнительных механизмов транспорт- но-технологических машин [3, 4]. На рисунке 1 показан пример гидравлической системы с исполнительным механизмом ‒ гидроцилиндром, который искусственно нагружается другим гидроцилиндром.
Как показано на рисунке, гидравлическая система нагружения используется для имитации внешней нагрузки, а платформа управления может управлять гидравлической системой нагружения для вывода различного значения усилия. Целью управления этой электрогидравлической системой приведения в действие является точное отслеживание заданного сигнала положения, при котором необходимо учитывать эффективность отслеживания, быструю реакцию, высокую точность и хорошую помехозащищенность. Поэтому стратегия управления этой системой очень важна, и для управления этой системой используется контроллер нейронной сети, учитывая, что она не нуждается в точной математической модели.
Результаты исследований. В случае отсутствия внешней нагрузки, приложенной к системе позиционирования электрогидравлического привода с переменным перемещением прямого привода, система управляется для отслеживания прямоугольного сигнала с использованием нейронной сети.
В исследовании [5] представлены результаты испытания такой системы. Использование стратегии управления нейронной сетью для управления положением обеспечивает удовлетворительную точность управления и скорость отклика в случае отсутствия нагрузки. Влияние внешней нагрузки будет еще больше ослаблено контроллером нейронной сети, поскольку электрогидравлическая система управления приводом также может обеспечивать быстрое отслеживание прямоугольного сигнала. Нагрузка в реальной ситуации обычно возникает быстро и неожиданно. Контроллер нейронной сети обладает лучшей способностью подавлять влияние вмешательства.
318
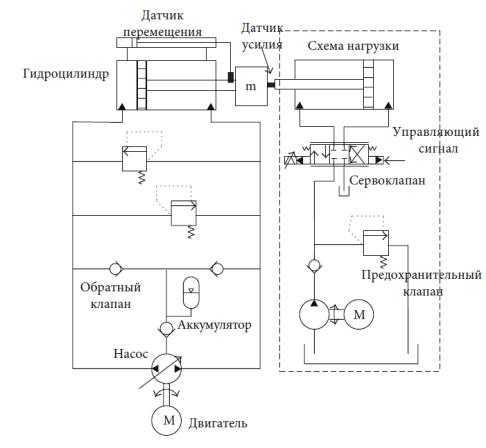
Рисунок ‒ Схема электрогидравлической системы управления положением привода
Выводы и предложения. Результаты моделирования [5] показывают, что нейронная сеть имеет лучшую производительность управления, превосходит соответствующую обычную систему управления по точности управления. Таким образом, многослойная система управления нейронной сетью обладает хорошими характеристиками защиты от помех. Кроме того, независимо от того, есть нагрузка или нет, контроллер нейронной сети для системы управления положением электрогидравлического привода с прямым приводом может обеспечить более быстрый отклик, лучшую точность управления и защиту от помех, что означает, что нейронная сеть может быть использована для разработки интеллектуального контроллера для транспортно-технологических машин. Однако требуются дальнейшие исследования.
Список литературы
1.Мальцев, Д. В. Повышение эффективности эксплуатации кузовных мусоровозов: монография / Д. В. Мальцев, Е. М. Генсон. – Пермь: ИПЦ Прокростъ, 2019. – 144 с. – ISBN 978- 5-94279-441-5.
2.Филькин, Н. М. Надежность унифицированной машины технологического электротранспорта в период ее нормальной эксплуатации / Н. М. Филькин, Р. Ф. Шаихов // Автоматизация технологических процессов механической обработки, упрочнения и сборки в машиностроении: сборник научных статей международной научно-технической конференции, Курск, 03–05 ноября 2016 года. – Курск: Юго-Западный государственный университет, 2016. – С. 311-315.
3.Основы конструкции автомобилей: Шасси. Трансмиссия / В. В. Лянденбурский, Р. Ф. Шаихов, В. М. Пономарев, Г. И. Шаронов. – Пенза: Изд-во ПГУАС: Пензенский государственный университет архитектуры и строительства, 2014. – 228 с. – ISBN 978-5-9282-1101-1.
319
4.Особенности конструктивных решений размещения и обслуживания накопителей энергии унифицированной машины технологического электротранспорта / Н. М. Филькин, С. А. Зыков, Р. Ф. Шаихов, А. М. Татаркин // Транспорт на альтернативном топливе. – 2018. – №
4(64). – С. 49-55.
5.Li, X., Xu, F., Zhang, J., & Wang, S. A multilayer feed forward small-world neural network controller and its application on electrohydraulic actuation system // Journal of Applied Mathematics, 2013. doi:10.1155/2013/872790
УДК 528.913:711.55.504.75
К ВОПРОСУ ОБ ОЦЕНКЕ ЭКОЛОГИЧЕСКОЙ БЕЗОПАСНОСТИ ТЕРРИТОРИИ НАСЕЛЕННЫХ ПУНКТОВ
О.С. Сергеева
ФГБОУ ВО Пермский государственный национальный исследовательский университет, г. Пермь, Россия
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
E-mail: oikeo@gmail.ru
Аннотация. Работа посвящена оценке экологической безопасности территории населенного пункта с применением геоинформационных систем. Производится расчет отношения площадей промышленных зон по категориям опасности к общей площади исследуемой территории. Приводится пример расчета для одного из районов г. Перми.
Ключевые слова: экологическая безопасность, промышленная зона, геоинформационная система.
Постановка проблемы. В современном мире актуальность проблем экологической безопасности гражданского населения постоянно возрастает. Согласно государственной политике Российской Федерации, экологическая безопасность является составной частью национальной безопасности [8]. Право граждан на благоприятную окружающую среду гарантировано Конституцией Российской Федерации. В то же время, согласно официальным данным, экологическая обстановка в стране оценивается как неблагополучная по многим параметрам [8]. Наиболее остро проблема качества окружающей среды стоит в городах, где проживает большая часть населения. Поиск качественных показателей для экологической оценки городов становится актуальной проблемой 4 .
Для оценки качества условий проживания в городах Российской Федерации был введен показатель «индекс качества городской среды», который формируется из статистических данных по тридцати пяти индикаторам [методика]. Однако из всех индикаторов только один связан с экологической обстановкой, он показывает общую площадь зеленых насаждений в пределах городской черты. Этот показатель учитывает зеленые насаждения общего и ограниченного пользования, а также специального назначения. Немаловажным является показатель отношения благоустроенных озелененных территорий, которые «используются населением для отдыха, прогулок и развлечений», к общей площади озеленения, в которую также включаются зеленые массивы, непригодные или закрытые для посещения. Рассчитывается также отношение площади, покрытой растительностью, к общей площади города [3, 5]. Так, индекс качества городской сре-
320