

913
.pdf
|
|
|
Таблица |
Расходы на топливо |
|
||
|
|
|
|
Наименование |
|
Поставщик 1 |
Поставщик 2 |
|
|
|
|
1. Цена за единицу топлива, руб. |
|
50 |
46 |
|
|
|
|
2. Расход топлива на 100 км, л |
|
23 |
23 |
|
|
|
|
3. Общий пробег автопарка, км |
|
1 100 000 |
1 100 000 |
|
|
|
|
4. Расход топлива на 100 т-км, л |
|
1,3 |
1,3 |
|
|
|
|
5. Объем перевозок за год, т |
|
16 000 |
16 000 |
|
|
|
|
6. Поправочный коэффициент |
|
20 |
20 |
|
|
|
|
7. Итоговые затраты, руб. |
|
12 685 721,0 |
11 670 863,32 |
|
|
|
|
|
Список литературы |
|
|
1.Байдин, Д. А. Выбор подхода для оптимизации маршрутов движения специального автомобиля по сбору и вывозу твердых коммунальных отходов / Д. А. Байдин, Д. В. Мальцев // Химия. Экология. Урбанистика. – 2019. – Т. 2019-2. – С. 22-26.
2.Чепикова, Т. П. Анализ аварийности и повышение безопасности дорожного движения / Т. П. Чепикова, Р. Ф. Шаихов, А. А. Поварницин // Мир транспорта и технологических машин. – 2013. – № 1(40). – С. 67-71.
3.Основы конструкции автомобилей: Шасси. Трансмиссия / В. В. Лянденбурский, Р. Ф. Шаихов, В. М. Пономарев, Г. И. Шаронов. – Пенза: Изд-во ПГУАС : Пензенский государственный университет архитектуры и строительства, 2014. – 228 с. – ISBN 978-5-9282-1101-1.
4.Шаихов, Р. Ф. Контроль производственного персонала на автотранспортном предприятии / Р. Ф. Шаихов // Транспорт. Транспортные сооружения. Экология. – 2019. – № 3. – С. 89-95. – DOI 10.15593/24111678/2019.03.11.
5.Шибаев, Е. В. Диагностирование форсунок по величине тока электромагнитного клапана во время впрыска / Е. В. Шибаев, Р. Ф. Шаихов // Проблемы функционирования систем транспорта : Материалы Всероссийской (национальной) научно-практической конференции студентов, аспирантов и молодых ученых, Тюмень, 07–09 декабря 2021 года / Отв. редактор П.В. Евтин. – Тюмень: Тюменский индустриальный университет, 2022. – С. 178-182.
УДК 656.13
О ПЕРСПЕКТИВАХ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДИНАМИЧЕСКОГО ГАБАРИТА АВТОМОБИЛЕЙ
С.Г. Гурьянов
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
E-mail: gsg9171@yandex.ru
Аннотация. В статье проанализированы подходы к определению динамического габарита безопасности транспортных средств. Представлена и проанализирована методика расчета, проведен обзор перспектив использования систем V2X для создания автоматизированных систем помощи водителям или беспилотников.
Ключевые слова: динамический габарит, безопасность движения, торможение транспортных средств, дорожно-транспортные происшествия, безопасный интервал.
281
Постановка проблемы. Обеспечение безопасности дорожного движения и снижение рисков возникновения дорожно-транспортных происшествий является очень важной задачей [1]. Её решение лежит не столько в плоскости совершенствования конструкции [2‒4], сколько в развитии технологий беспилотного управления. Изучение теории следования автомобилей в потоке в городских условиях имеет очень важное практическое значение, может способствовать организации и управлению дорожным движением [5] и уменьшить заторы на дорогах. Одним из перспективных направлений является развитие систем помощи водителю, в том числе такой, которая определяет и контролирует расстояние до движущегося впереди транспортного средства.
Автоматизированная система может как предупреждать водителя, так и непосредственно снижать скорость автомобиля, что значительно повысит безопасность и снизит вероятность дорожно-транспортных происшествий. Разработка системы помощи водителям, что фактически является составными элементами беспилотных систем, обладает большим потенциалом научных исследований и имеет хорошие перспективы коммерциализации.
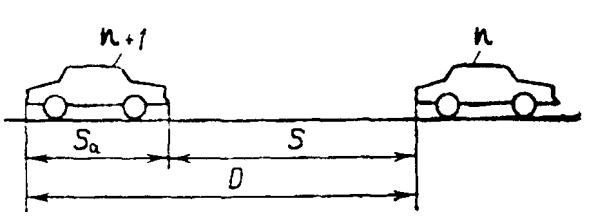
Материалы и методы. Контроль расстояния до впереди движущегося автомобиля возможен через автоматический расчет динамического габарита транспортного средства D (рис.), который представляет собой сумму статического габарита транспортного средства Sa и безопасной дистанции S.
На динамический габарит влияет скорость транспортного средства, коэффициента сцепления колес с дорогой, а также необходимо учитывать характеристики ускорения, стиль вождения, состояние дорожного покрытия.
Модель следования за автомобилем, основанная на постоянном движении вперед, в настоящее время является наиболее широко используемой. Впервые она предложена лабораторией Калифорнийского университета в Беркли.
Рисунок ‒ Динамический габарит транспортного средства
Структура модели проста, а параметры модели имеют четкие физические значения, что также является причиной широкого использования модели, выглядит она следующим образом:
(1)
где ‒ ускорение автомобиля n в момент времени t;
‒скорости автомобилей в момент времени t;
‒дистанция между автомобилями в момент времени t;
282
‒время торможения;
‒длина автомобиля n;
‒минимальное безопасное расстояние;
‒эмпирические коэффициенты управление моделью.
Врезультате анализа формулы (1) можно увидеть, что модель включает в себя разность скоростей и интервал движущихся автомобилей. Желаемый интервал может быть выражен следующим образом [2]:
(2)
Из уравнения видно, что уравнение желаемого интервала является линейной функцией скорости. Однако в реальных условиях эксплуатации автомобили движутся с ускорениями и замедлениями, что станет причиной быстро и многократно изменяющегося габарита безопасности. В случае резкого замедления предшествующего автомобиля необходимо быстро снизить скорость последующего автомобиля, чтобы сохранить безопасную дистанцию и предотвратить дорожно-транспортное происшествие. Однако
вреальности водитель не всегда может успеть среагировать. Аналогичная ситуация возникает при ускорении впереди едущего автомобиля. Дело в том, что избыточное значение динамического габарита приводит к снижению пропускной способности до- рожно-транспортной сети, снижению средней скорости, увеличению времени средней транспортной корреспонденции. Чтобы поддерживать расстояние между автомобилями
вбезопасном диапазоне значений, его необходимо постоянно рассчитывать и контролировать, с этим может справиться компьютерная программа.
Результаты исследований. Автоматизированная система помощи водителю полагается на бортовое сенсорное оборудование для определения параметров движения других участников движения, а затем оптимизирует параметры управляемого автомобиля или дает рекомендации водителю. Однако точность информации, полученной от сенсорного оборудования, ограничена, кроме того, требуется некоторое время от определения состояния движения предыдущего автомобиля до анализа, вычисления результатов и обратной связи в форме рекомендации водителю или управляющего воздействия на автомобиль. Следовательно, управление будет иметь определенную временную задержку.
Всоответствии с недостатками модели движения с постоянной скоростью, упомянутой выше, основанной на оригинальной модели Калифорнийского университета в Беркли, а также с учетом факторов экстренного ускорения или замедления автомобиля предложена улучшенная методика расчета:
(3)
(4)
где - постоянные коэффициенты, больше нуля.
Ввиду различий при ускорении и замедлении автомобиля в уравнении (3) знак перед последним слагаемым может меняться, соответственно, при ускорении плюс, при замедлении ‒ минус.
Второй вариант модели расчета безопасного расстояния может быть более адаптивной к сложному и изменчивому скоростному режиму, который присутствует в реальных условиях эксплуатации.
Выводы и предложения. Наиболее перспективным способом обнаружения системой помощи водителю информации о внешней среде в настоящий момент является
283
система V2X. Где латинской буквой V обозначается автомобиль, а X ‒ любой объект, взаимодействующий с автомобилем, в том числе другие автомобили, люди, дорожная инфраструктура и прочее. Данная технология беспроводной связи, применяемая на транспорте, по сравнению с камерой или лидаром, обычно используемыми в технологии автоматического вождения, обладает способностью получать информацию через препятствия. Также она позволяет обмениваться информацией о состоянии данного транспортного средства в режиме реального времени с другими участниками дорожного движения и получать информацию об объектах инфраструктуры. Полученная информация напрямую обеспечивает точность расчетов габаритов безопасности в режиме реального времени.
Список литературы
1.Чепикова, Т. П. Анализ аварийности и повышение безопасности дорожного движения / Т. П. Чепикова, Р. Ф. Шаихов, А. А. Поварницин // Мир транспорта и технологических машин. – 2013. – № 1(40). – С. 67-71.
2.Основы конструкции автомобилей: Шасси. Трансмиссия / В. В. Лянденбурский, Р. Ф. Шаихов, В. М. Пономарев, Г. И. Шаронов. – Пенза: Изд-во ПГУАС : Пензенский государственный университет архитектуры и строительства, 2014. – 228 с. – ISBN 978-5-9282-1101-1.
3.Шаихов, Р. Ф. Контроль производственного персонала на автотранспортном предприятии / Р. Ф. Шаихов // Транспорт. Транспортные сооружения. Экология. – 2019. – № 3. – С. 89-95. – DOI 10.15593/24111678/2019.03.11.
4.Шибаев, Е. В. Диагностирование форсунок по величине тока электромагнитного клапана во время впрыска / Е. В. Шибаев, Р. Ф. Шаихов // Проблемы функционирования систем транспорта : Материалы Всероссийской (национальной) научно-практической конференции студентов, аспирантов и молодых ученых, Тюмень, 07–09 декабря 2021 года / Отв. редактор П.В. Евтин. – Тюмень: Тюменский индустриальный университет, 2022. – С. 178-182.
5.Байдин, Д. А. Выбор подхода для оптимизации маршрутов движения специального автомобиля по сбору и вывозу твердых коммунальных отходов / Д. А. Байдин, Д. В. Мальцев // Химия. Экология. Урбанистика. – 2019. – Т. 2019-2. – С. 22-26.
УДК 539.4.01
ПРИМЕНЕНИЕ СИСТЕМЫ MathCad ДЛЯ РАСЧЁТА СТАТИЧЕСКИ НЕОПРЕДЕЛИМОЙ БАЛКИ НА ПРОЧНОСТЬ
В.А. Елтышев, Ю.А. Барыкин
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
Аннотация. В статье представлено решение задачи, в которой раскрыта статическая неопределимость трёхопорной балки, определены реакции в опорах, построена эпюра изгибающего момента и выбран профиль двутавра для опасного сечения с применением системы MathCad.
Ключевые слова: балка, статическая неопределимость, метод сил, эпюра, условие прочности, система MathCad.
Постановка проблемы. Расчёты статически неопределимых конструкций представляют собой довольно трудоёмкие задачи. Для снижения трудоёмкости такого рода задач предложено использовать инженерную систему MathCad.
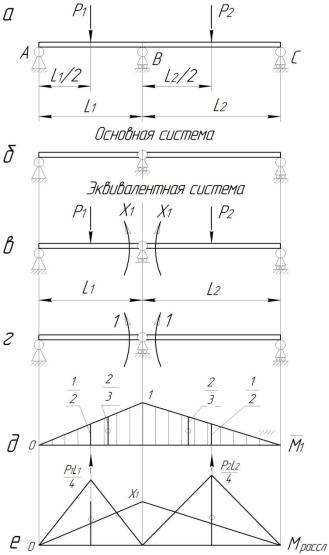
Материалы и методы. Схема балки представлена на рисунке 1а, на котором балка закреплена с помощью одной шарнирной неподвижной и двух шарнирных подвижных опор, со следующими исходными данными:
284
длина первого пролёта балки |
L1 1.5 |
м, |
длина второго пролёта балки |
L2 2 |
м, |
сосредоточенная поперечная сила, действующая в центре первого пролёта P1 15кH, сосредоточенная поперечная сила, действующая в центре второго пролёта P2 10кH,
допускаемое нормальное напряжение материала балки |
160 МПа. |
Необходимо определить № двутавра для опасного сечения балки.
1. Методом сил [1, 3, 5] раскрываем статическую неопределимость системы. 1.1. Определяем степень статической неопределимости системы D.
В данной конструкции балки число опорных и внутренних связей
Cоп 4 |
D Cоп 3 |
D 1 |
, |
|
где 3 ‒ число независимых уравнений статики. На основании расчёта для данной балки будет первая степень статической неопределимости.
1.2. Изображаем основную и эквивалентную системы (рисунок 1б, 1в).
Рисунок 1 – Схема статически неопределимой балки, эпюры изгибающих моментов для метода сил
285
1.3. Составляем каноническое уравнение метода сил
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 X1 1P |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
1.4. Определяем коэффициент и свободный член канонического уравнения (ри- |
|||||||||||||||||||||||||||||||||||||||||||||||||||
сунок 1г, 1д, 1е) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
11 |
|
1 |
L1 |
1 |
|
2 |
|
1 |
L2 1 |
2 |
|
|
11 1.167 |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
2 |
3 |
2 |
3 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5. |
|
|
Решение |
канонического |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
1 |
|
|
P1 L1 |
|
1 |
|
1 |
|
|
|
|
P2 L2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
уравнения |
|
для |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
1P |
|
|
L1 |
|
|
|
|
|
|
|
|
|
|
L2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1P 4.609 |
определения |
|||||||||||||||||||
2 |
|
|
|
2 |
2 |
|
|
4 |
|
|
|
2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
неизвестного |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
изгибающего момента Х1 в шарнире В (рисунок 1в). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
X1 0 |
|
|
Given |
|
|
11 X1 1P |
|
|
0 |
|
|
|
|
X1 Find X1 |
|
X1 |
3.951 |
кH м. |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
2. Определяем реакции в опорах A, C, B с учётом определённого момента Х1 |
|||||||||||||||||||||||||||||||||||||||||||||||||||
(рисунок 2а), для левой части балки относительно шарнира В (рисунок 2б) |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
mB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
YA 0 |
|
|
|
|
Given |
|
YA L1 P1 |
|
|
X1 |
|
|
0 |
YA Find YA |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
для правой части балки относительно шарнира В |
|
|
|
|
YA 10.134 |
|
кH; |
||||||||||||||||||||||||||||||||||||||||||||
(рисунок 2в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
mB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
0 |
|
|
YC 0 |
|
|
|
|
Given |
|
P2 |
|
YC L2 X1 |
|
|
0 |
YC Find YC |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
для всей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
YC 6.975 |
кH; |
|||||||||||||||
балки относительно опоры С (рисунок 2г) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
L |
|
|
|
||
mC |
|
|
0 |
|
YB 0 |
|
|
|
Given |
|
|
YA L1 L2 |
P1 |
1 |
L2 YB L2 P2 |
2 |
|
|
|
0 |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Y |
Find Y |
|
|
|
Y 7.891 |
кH; |
|||
|
|
|
|
|
|
|
|
|
|
B |
|
B |
|
|
|
B |
|
|
|
Проверяем правильность определения реакций в опорах на основании уравнения |
|||||||||||||||||||
проекций сил и уравнения моментов относительно опоры А для всей балки |
|
|
|
||||||||||||||||
|
|
|
Y |
|
0 |
YA P1 YB P2 YC 0 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
L |
|
|
L |
|
|
|
|
||||
mA |
|
0 |
YC 0 |
Given |
P1 |
1 |
YB L1 P2 L1 |
|
2 |
|
YC L1 L2 |
|
0 |
||||||
|
2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Y Find Y |
|
|
|
|
Y 6.975 |
кH. |
|||
|
|
|
|
|
|
|
|
|
|
C |
C |
|
|
|
|
C |
|
|
|
286
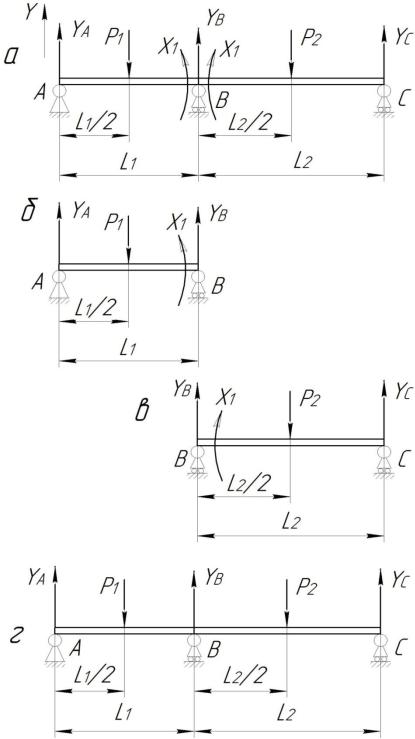
Рисунок 2 – Схема статически неопределимой балки для определения реакций в опорах A, C, B
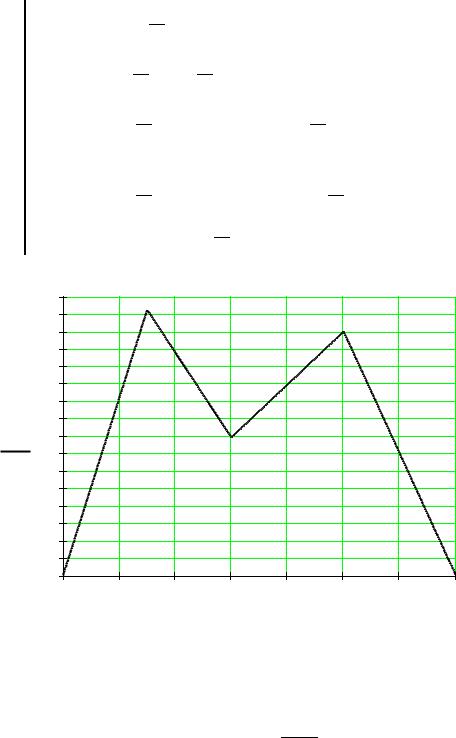
3. Расчет и построение эпюры изгибающего момента М(z) по участкам балки методом сечений. Изгибающий момент М(z) является ступенчатой функцией от дискретной переменной z [4]. Для четырёх участков балки начало z будет в одной и той же крайней левой точке балки.
287
M( z) |
YA z |
|
|
|
|
|
|
L1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
if 0 z |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L1 |
if |
L1 |
z |
L |
|
|
|
|
|
|
|
|
|
||||||
|
Y z P |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
A |
|
1 |
|
|
2 |
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
|
YA z |
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|||
|
P1 |
z |
|
1 |
|
|
if |
L1 |
z |
L1 |
|
2 |
|
|
|
|
|
|
|||||||||
|
Y z L |
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
B |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y z |
P |
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
L |
|
z |
|
|
L |
|||
|
|
|
|
z |
|
1 |
|
|
|
|
|
|
if |
L |
2 |
|
|
L |
|||||||||
|
|
A |
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
1 |
2 |
||||
|
Y z L |
P |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
z L |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
B |
|
|
|
1 |
2 |
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M(z) |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
0.5 |
|
|
|
1 |
|
|
1.5 |
|
|
2 |
|
|
2.5 |
|
3 |
|
3.5 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 3 – Эпюра изгибающего момента М(z) |
|||||||||||||||||||
Результаты исследований. Определяем номер двутавра для опасного сечения из условия прочности при прямом изгибе [1, 2, 3]
Mmaxmax Wx
где Wx ‒ осевой момент сопротивления поперечного сечения балки.
В опасном сечении на основании построенной эпюры максимальный изгибающий момент равен
M 7.6 106 |
Н мм |
max |
, |
тогда осевой момент сопротивления поперечного сечения балки будет равен
288
W |
Mmax |
W 47.5 103 |
мм3 |
||
|
|
||||
x |
x |
. |
|||
В соответствии с ГОСТ 8239-89 принимаем двутавр № 12 со значением осевого момента сопротивления поперечного сечения [1, 3]
W 58.4 103 |
мм3 |
x |
. |
Выводы и предложения. Спроектирована статически неопределимая балка с помощью системы MathCad, которая позволяет снизить трудоёмкость рассматриваемого типа задач.
Список литературы
1.Асадулина, Е. Ю. Сопротивление материалов: учебное пособие для вузов / Е.Ю. Асадулина. – 2-е изд., испр. и доп. – Юрайт, 2022. – 279с. //Образовательная платформа Юрайт [сайт]. – URL:https://urait.ru/bcode/492139. – Режим доступа: для авториз. пользователей. – Текст: электронный (дата обращения 04.04.2022).
2.Елтышев, В.А. Сопротивление материалов: методические указания для выполнения курсовых работ/ В.А. Елтышев, Ю.А. Барыкин. ФГБОУ ВО Пермская ГСХА – Пермь: ИПЦ Прокрость, 2017. – 48с.
3.Молотников, В.Я. Курс сопротивления материалов: учебное пособие/ В.Я. Молотни- ков-2-е изд.,стер. – Санкт-Петербург: Лань, 2021. – 384с.
4.Вафин, Р.К. Расчеты на прочность элементов машиностроительных конструкций в среде MathCad: учебное пособие / Р.К. Вафин. – Старый Оскол: ТНТ, 2010. – 577с.
5.Степин, П.А. Сопротивление материалов: учебник / П. А. Степин. – 13-е изд., стер. – Санкт-Петербург: Лань, 2022. – 320 с. // Лань: электронно-библиотечная система [сайт]. – URL: https://e.lanbook.com/book/210815. – Режим доступа: для авториз. пользователей. – Текст: электронный (дата обращения 04.04.2022).
УДК 631.2:621.31
ТЕНДЕНЦИИ В ОБЛАСТИ АВТОНОМНОГО ЭНЕРГОСНАБЖЕНИЯ ЖИВОТНОВОДЧЕСКИХ ОБЪЕКТОВ
В.С. Ивашкин1, А.И. Бурков1, И.С. Гордеева2, Р.В. Отавина2
1ФГАОУ ВО «ПНИПУ», г. Пермь, Россия
2ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
E-mail: vladimirivashkinq@ya.ru
Аннотация. В статье рассматривается автономное энергоснабжение животноводческих объектов. Отмечаются причины использования альтернативных источников энергии. Рассмотрены основные виды энергии, используемые в автономных энергоустановках. Отмечаются особенности применения источников энергии на животноводческих объектах.
Ключевые слова: альтернативные источники энергии, автономные энергоустановки, животноводство, энергообеспечение.
Постановка проблемы. Сельскохозяйственное производство, в частности животноводческие объекты, отличаются относительно большой энергоемкостью. Истори-
289
чески для энергоснабжения применяются традиционные источники энергии. Однако за последние несколько десятилетий наблюдается тенденция к применению альтернативных источников энергии. Для животноводческих объектов существуют свои предпочтения в выборе источников энергии, исходя из ряда факторов. Зачастую подобные объекты располагаются вдали от населенных пунктов, что требует дополнительных мероприятий по обеспечению энергоресурсами.
В 21 веке во многих странах продолжается разработка планов по внедрению и переходу к альтернативной энергетике [10]. Для обеспечения работы удаленных объектов сельского хозяйства используются различные системы автономного энергоснабжения [4]. Однако стоит отметить ряд факторов, которые за последние годы оказали большое влияние на оценку возможностей внедрения и использования альтернативных источников энергии, что сказалось и на сфере сельского хозяйства. Одними из ключевых факторов стали пандемия COVID-19 и энергетический кризис 2021‒2022 года. К 2020 году наблюдался стабильный рост производства энергоресурсов, однако в 2020 году производство упало на 3‒4 % [9]. Соответственно, упал спрос на традиционные источники энергии, такие как нефть, природный газ и уголь. В 2020‒2021 году наблюдалось снижение выработки электроэнергии на ветряных электростанциях из-за погодных условий. Кроме того, в это же время произошло сокращение предложения газа на мировом рынке. В связи с вышеперечисленными факторами спрос на энергоресурсы не был покрыт предложением [5].
С одной стороны, сложившаяся ситуация показала важность рационального использования источников энергии. С другой стороны, была показана эффективность некоторых альтернативных источников энергии. В частности, хорошо себя показали автономные энергоустановки с применением технологий, использующих солнечную энергию, энергию биомассы, геотермальную энергию и др. Однако использование ветровой энергии показало нестабильную выработку энергии, чем подтвердило, что установка, использующая альтернативный источник энергии, должна включать в себя другие традиционные или альтернативные источники энергии в качестве резервных.
Результаты исследований. Автономные энергоустановки. Подключение жи-
вотноводческих объектов к энергетическим сетям ввиду ряда факторов может являться экономически нецелесообразным. В таком случае их энергоснабжение осуществляется от автономных энергоустановок, которые позволяют обеспечить объект стабильной выработкой энергетических ресурсов.
По назначению можно выделить следующие виды автономных энергоустановок: установки, вырабатывающие только электрическую энергию; установки, вырабатывающие только тепловую энергию; установки, вырабатывающие как тепловую, так и электрическую энергию. Данные установки могут быть как стационарными, так и мобильными.
К настоящему времени для автономного энергоснабжения сельскохозяйственных потребителей наибольшее распространение по виду энергии получили:
‒ветровая (ветрогенератор);
‒солнечная (панель, коллектор);
‒геотермальная;
‒биомасса (биогаз и др.);
‒гидроэнергетика (малые ГЭС);
‒топливная (дизель, газ, бензин).
290