

913
.pdfВыводы и предложения. Выше нами предпринята попытка показать, что простая с виду водонапорная башня конструкции инженера Рожновского относится к числу достаточно сложных физических систем. Для описания механизма работы ВБР можно использовать и сложный математический аппарат дифференциального и интегрального исчисления. Однако в отличие от приведенного выше решения, держа перед собой распечатки численного решения задачи по тепло- и массопереносу, выполненные на ЭВМ, можно и не заметить сущность реализованного А.А. Рожновским в простой конструкции уникального решения. Вопрос сохранности ВБР по мере их эксплуатации многогранен, в ближайшее время данный вопрос вряд ли следует снять с актуальной повестки дня.
Список литературы
1.Влияние поения на удой [Электронный ресурс]. URL: https://agri- news.ru/zhurnal/2012/12012/vliyanie-poeniya-na-udoj (дата обращения 29.09.2022).
2.Манташов, А.Т. Теплотехника. Ч.1. Термодинамика и теплопередача: учебное пособие / А.Т. Манташов. Пермь: Изд – во ПГСХА. 2009. – 184 с.
3.Рожновский, А.А. Авторское свидетельство на изобретение СССР №121555 заявл. 16.09.1958, опубл. – бюл. №15. За 1959 г.
4.Рязанов, А.Б. Охлаждение молока с одновременным подогреом воды для предотвращения замерзания водонапорных башен Рожновского / А.Б. Рязанов, М.Б. Фомин // Международный научный исследовательский журнал. 2019. №7(85). Ч. 1. С. 29 – 32.
5.Усаковский, В.М. Водоснабжение в сельском хозяйстве / В.М. Усаковский. – 2-е изд., перераб. и доп. ‒ М.: Агропромиздат. 1989. – 280 с.
УДК 62-235
МОДЕЛЬ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ С ИНДИВИДУАЛЬНЫМ ПРИВОДОМ КОЛЕС
В.А. Лапицкий, А.А. Бердников
ФГБОУ ВО ПВИ ВНГ РФ, г. Пермь, Россия
E-mail: aa-berdnikov@mail.ru
Аннотация. В статье приведена математическая модель электромеханической трансмиссии, учитывающая различные принципы распределения мощности по колесам движителя, интегрируемая в комплексную математическую модель движения инженерной машины с прицепным звеном. Приведен сравнительный анализ результатов моделирования движения инженерной техники в различных дорожных условиях.
Ключевые слова: инженерная техника, электромеханическая трансмиссия, активное прицепное звено, распределение мощности, колесный движитель.
Эффективная доставка инженерных средств, масса которых может достигать нескольких тонн, возможна с применением прицепных звеньев, буксируемых автомобилями высокой проходимости. Однако условия выполнения задач создают необходимость транспортирования инженерных средств не только в условиях развитой дорожной сети, но и по бездорожью. Одним из основных недостатков, ограничивающих возможность применения автопоездов в таких условиях, явилась их низкая проходимость.
301
Постановка задачи. Современные разработки в сфере машиностроения позволили повысить проходимость специальной техники с прицепным звеном за счёт применения активного прицепного звена, где привод каждого колеса осуществляется через электромеханическую трансмиссию. Однако вопрос эффективного распределения мощностей между колёсами транспортного средства и прицепного звена остался нерешённым до сих пор [1].
Материалы и методы. Для оценки различных принципов распределения мощностей были сформулированы математические модели индивидуального привода колёсного движителя для последующей интеграции в комплексную модель движения транспортного средства [2].
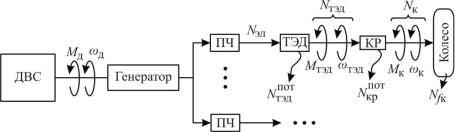
Распределение привода на колёса в электромеханической трансмиссии представлено на рисунке, при этом количество выходных каналов будет эквивалентно количеству опорно-ходовых модулей, применяемых на инженерной технике.
Общий вид динамики электромеханической трансмиссии с приводом для каждого колёса можно представить системой уравнений [3]:
(J |
|
J |
|
|
|
|
|
М |
|
|
; |
|
|
|
|
д |
|
) M |
д |
сд |
|
|
|
||||||||
|
г |
|
|
д |
|
|
|
|
|
|
|||||
|
|
J |
|
|
U |
2 |
|
M |
|
М |
|
, |
(1) |
||
(J |
кi |
тi |
кр |
) |
|
кi |
fi |
|
|||||||
|
|
|
кi |
|
|
|
|
|
|||||||
где Jд , Jг , Jт – моменты инерции коленчатого вала двигателя внутреннего сгорания
(ДВС), вала генератора, вала i-го тягового электродвигателя (ТЭД) соответственно;
д
– угловое ускорение коленчатого вала ДВС; Uкр – передаточное число колесного редуктора.
Рисунок – Схема канала индивидуального привода колес: ДВС – двигатель внутреннего сгорания; ПЧ – преобразователь частоты; ТЭД – тяговый электродвигатель; КР – колесный редуктор; Nэл – мощность электрическая, потребляемая ТЭД;
Nтэдпот – мощность, теряемая в ТЭД; Nтэд – механическая мощность, реализуемая на ва-
лу ТЭД; М д – крутящий момент на входе в трансмиссию, снимаемый с вала ДВС; д
–угловая скорость вала ДВС; М тэд – крутящий момент, реализуемый на валу ТЭД;
тэд – угловая скорость вала ТЭД; Nкрпот – мощность, теряемая в колесном редукторе;
Nк – механическая мощность, подводимая к колесу; М к – крутящий момент, реализуемый на выходном валу колесного редуктора; к – угловая скорость выходного вала колесного редуктора; N fк – мощность сопротивления качению шины
Уравнение, описывающее динамику выходного вала тягового электродвигателя, связанного через редуктор с движителем инженерной техники [4], представляется как произведение момента инерции вала колёсного редуктора на его угловую скорость:
302
J |
|
M ТЭДi Uкр кр |
М fi , |
(2) |
кi кi |
где MТЭДi – крутящий момент на выходном валу i-го ТЭД; кр – КПД колесного редуктора.
Для определения моментов M ТЭДi (силовых факторов), характеризующих рабо-
ту движителя, необходим учет линейной vкi и угловой кi скоростей движения i-го колеса (скоростных факторов), а также скольжения Si в пятне контакта колеса с опорной
поверхностью. Для определения силовых факторов используем различные принципы распределения мощности по колёсным движителям инженерной техники. При расчетах влияние процессов внутренней динамики электромеханической трансмиссии не будет учитываться:
принцип равенства моментов (дифференцированный привод):
|
|
|
|
|
2n |
|
|
|
|
|||
|
|
|
|
|
кi |
|
||||||
|
|
|
|
i 1 |
|
|
|
; |
||||
к.ср |
|
|
|
|
|
|||||||
|
|
|
|
|
2n |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
N |
д |
|
|
|
|
|||
|
|
|
|
тр |
|
|
|
|||||
М |
д |
|
|
|
|
|
; |
(3) |
||||
к.ср |
||||||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
М д |
|
|
|||
М |
|
|
|
; |
|
|||||||
ТЭДi |
|
|
||||||||||
|
|
|
|
|
2n |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
принцип равенства мощностей:
|
кi |
Nд тр |
|
|
|||
N |
|
|
|
; |
|||
2n |
|
||||||
|
|
|
|
(4) |
|||
|
|
|
|
N |
|
||
М |
|
|
кi |
; |
|||
ТЭДi |
|
|
|||||
|
|
|
|
|
|
||
|
|
|
|
|
кi |
|
|
принцип равенства частот вращения (блокированный привод):
|
|
|
|
|
|
2n |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
кi |
|
|
|
|
|
|
|
|||
|
|
|
|
i 1 |
|
; |
|
|
|
|
|
|||||
к.ср |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
2n |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
к.ср кi |
|
|
|
|
|
||||||
М |
|
|
|
М |
; |
|||||||||||
i |
|
|
|
|
||||||||||||
|
|
|
|
|
|
кi |
|
|
|
|
|
ТЭДi |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|||
|
|
|
|
Nд тр |
|
|
|
|
|
|
|
|
|
|||
М |
|
|
; |
|
|
|
|
|||||||||
д |
|
|
|
|
|
|
||||||||||
|
|
|
|
к.ср |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
М д |
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
М |
|
; |
|
|
|||||||
ТЭДi |
|
i |
|
|
||||||||||||
|
|
|
|
|
2n |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
принцип равенства скольжений:
303
|
|
|
|
|
|
|
|
2n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Si |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
S |
|
|
|
|
|
i 1 |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
2n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Sср |
Si |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
М |
|
|
|
|
М |
|
, |
при S |
|
S |
|
|
; |
|
|
|
|||||||||||||||
Si |
|
|
|
|
|
|
|
|
|
|
ср |
пред |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Si |
ТЭДi |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
Sпред Si |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
М |
|
|
|
|
М |
, |
при S |
|
S |
|
|
; |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
Si |
|
|
|
|
|
|
|
Si |
|
ТЭДi |
|
ср |
|
пред |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
2n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
кi |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
i 1 |
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
к.ср |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
2n |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
М д |
|
|
|
|
д |
|
тр |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
к.ср |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
М д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
М |
|
|
|
|
|
|
М |
|
, |
|
|
|
|
|
|
|
|
|
|
||||||||||||
ТЭДi |
|
|
Si |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
2n |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
где к.ср – средняя угловая скорость всех ведущих колес; |
Nк – мощность, подводимая к |
||||||||||||||||||||||||||||||
i-му колесу; М i |
– приращение крутящего момента, который необходимо подвести к i- |
||||||||||||||||||||||||||||||
му колесу, чтобы его угловая скорость была равна |
|
к.ср |
; |
М |
– текущее (мгновенное) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТЭДi |
|
||
значение крутящего момента, подведенного к i-му колесу; М Si |
– приращение крутяще- |
||||||||||||||||||||||||||||||
го момента, который необходимо подвести к i-му колесу, чтобы его скольжение было равно Sср или Sпред ; n – количество ведущих осей.
Полученная математическая модель трансмиссии интегрируется в комплексную математическую модель движения транспортного средства. Модель движения реализована в среде имитационного математического моделирования динамических систем Simulink программного комплекса Matlab [5].
В математической модели реализованы принципы распределения мощности по колесам движителя.
Расчеты проводились при следующих условиях:
-тягач (Урал-4320-0111-61) колесная формула – 6×6, масса – 15 000 кг, ДВС мощностью – 180 кВт;
-полуприцеп (ЭД-100-Т400-1РП): колесная формула – 4×4, масса – 4000 кг, количество ТЭД – 4 с мощностью 15 кВт каждый.
Главными результатами расчета являются средняя скорость и время прохождения маршрута тягача с полуприцепом.
Для проведения расчётов был задан маршрут, на котором присутствуют подъёмы и спуски α, повороты с различной кривизной К, а также дорожное покрытие из различных материалов. Маршрут движения был разбит на 9 участков, каждый по 2,5 км. Параметры маршрута представлены в таблице 1.
Результаты исследований. Результаты моделирования прохождения автопоездом заданный маршрут представлены в таблице 2.
304
|
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
|
|
|
Параметры маршрута движения |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Участок |
|
Протяженность |
Кривизна |
|
Угол |
|
Коэффициент |
|
Коэффициент |
||
|
участков |
поворота, |
|
подъема |
|
сопротивления |
|
||||
маршрута |
|
|
|
|
сцепления, φ |
||||||
|
маршрута, l, м |
|
К, м |
|
(спуска), α, º |
|
|
качению, f |
|
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
700 |
1000 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1000 |
50 |
|
0 |
|
|
f1 = 0,020 |
|
φ1 = 0,75 |
|
|
|
800 |
1000 |
|
-5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
600 |
1000 |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1000 |
75 |
|
0 |
|
|
f2 = 0,025 |
|
φ2 = 0,70 |
|
|
|
9000 |
1000 |
|
-7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
700 |
1000 |
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
1000 |
100 |
|
0 |
|
|
f3 = 0,030 |
|
φ3 = 0,65 |
|
|
|
800 |
1000 |
|
-10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
700 |
1000 |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
800 |
125 |
|
0 |
|
|
f4 = 0,050 |
|
φ4 = 0,65 |
|
|
|
1000 |
1000 |
|
-7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
900 |
1000 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
800 |
100 |
|
0 |
|
|
f5 = 0,025 |
|
φ5 = 0,60 |
|
|
|
800 |
1000 |
|
-5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
700 |
1000 |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
900 |
75 |
|
0 |
|
|
f6 = 0,030 |
|
φ6 = 0,50 |
|
|
|
900 |
1000 |
|
-7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
800 |
1000 |
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
1000 |
50 |
|
0 |
|
|
f7 = 0,030 |
|
φ7 = 0,55 |
|
|
|
700 |
1000 |
|
-10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
800 |
1000 |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
1000 |
75 |
|
0 |
|
|
f8 = 0,100 |
|
φ8 = 0,45 |
|
|
|
700 |
1000 |
|
-7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
700 |
1000 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
700 |
100 |
|
0 |
|
|
f9 = 0,300 |
|
φ9 = 0,40 |
|
|
|
1100 |
1000 |
|
-5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
|
|
|
|
Результаты моделирования |
|
|
|||||
|
|
|
|
|
|||||||
Принцип распределения |
|
Время прохождения |
|
Средняя скорость |
|||||||
|
мощности |
|
|
|
маршрута |
|
движения, км/ч |
||||
|
|
|
|
|
|
|
|||||
1. Равенство мощностей |
|
|
39 мин 50 с |
|
|
33,88 |
|||||
|
|
|
|
|
|
|
|||||
2. Равенство скольжений |
|
|
44 мин 51 с |
|
|
30,10 |
|||||
|
|
|
|
|
|
|
|||||
3. Равенство моментов |
|
|
66 мин 37 с |
|
|
20,27 |
|||||
|
|
|
|
|
|
|
|||||
4. Равенство частот |
|
|
66 мин 41 с |
|
|
20,25 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Выводы и предложения. Анализ результатов моделирования показывает, что наиболее предпочтительным является режим равенства мощностей. Далее по предпочтительности режимы расположились так, как показано в таблице 2. Менее предпочтительными оказались традиционные режимы, используемые в механической трансмиссии: равенство моментов (дифференциальный привод) и равенство частот (блокированный привод), результаты которых практически идентичны. Это объясняется преобладанием на маршруте дорожных условий с высоким коэффициентом сцепления и малым
305
сопротивлением качению. Результаты первых двух режимов значительно лучше традиционных, их реализация возможна при применении электромеханической трансмиссии с электронным управлением. Разница во времени прохождения маршрута составила 26 мин 51 с на 22,5 км. Прирост средней скорости при равенстве мощностей по отношению к режиму с равенством частот (блокированной трансмиссии) составил 67,3 %, а по отношению к режиму с равенством скольжений – на 48,6 %.
Таким образом, в электромеханической трансмиссии возможно распределение крутящего момента по ведущим колесам движителя не только по принципу дифференциального или блокированного привода (они показали худшие результаты в сравнении), но и по принципу равенства мощностей и скольжения.
Список литературы
1.Коркин, С.Н. Применение активных колесных модулей в автопоездах для перевозки крупногабаритных и тяжеловесных грузов / С.Н. Коркин, Р.Х. Курмаев, А.С. Крамер // Известия МГТУ «МАМИ». ‒ № 2(14). ‒ 2012. – С. 160-168.
2.Белоусов, Б.Н. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет / Б.Н. Белоусов, С.Д. Попов; под общ. ред. Б.Н. Белоусова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. – 728 с.
3.Чудаков, О.И. Разработка закона распределения мощности между звеньями при прямолинейном движении автопоезда на основе анализа силовых факторов в сцепном устройстве : дис. … канд. техн. наук : 05.05.03 / Чудаков Олег Игоревич. – М., 2017. – 146 с.
4.Горелов, В.А. Алгоритм управления индивидуальным приводом колесных движителей транспортных средств / В.А. Горелов, Г.О. Котиев, А.В. Мирошниченко // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. – 2011. – Спец. вып. «Энергетическое и транспортное машиностроение». – С. 39 – 58.
5.Бердников, А.А. Математическая модель электромеханической трансмиссии для автопоезда с активным прицепным звеном с различными принципами распределения мощности по колесам движителя / А.А. Бердников, А.Н. Сова, А.В. Келлер // Стратегическая стабильность. – 2021. – № 3(96). – С. 38-43.
УДК 631.372
ПОВЫШЕНИЕ ПРОИЗВОДИТЕЛЬНОСТИ ПЕРЕВОЗОЧНОГО ПРОЦЕССА ПРИ ДОСТАВКЕ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ
НА АВТОМОБИЛЬНОМ ТРАНСПОРТЕ
В.Н. Мальчиков, А.В. Шемякин, Д.С. Рябчиков
ФГБОУ ВО РГАТУ им. П.А. Костычева, г. Рязань, Россия
E-mail: malchikovviktor@yandex.ru
Аннотация. Транспортная инфраструктура играет значительную роль в развитии сельского хозяйства. В этом исследовании мы изучаем взаимосвязь между показателями транспорта и сельского хозяйства, используя показатели дорожной инфраструктуры. Различия в состоянии транспортной инфраструктуры страны могут способствовать неоднородности производительности сельского хозяйства в разных странах. Транспортная инфраструктура оказывает прямое и косвенное влияние на сельское хозяйство. По теории Голлина и Роджерсона, фактором, ограничивающим продуктивность сельского хозяйства, является не скудость природных ресурсов и не отсутствие технологи-
306
ческого потенциала для повышения производительности на основе переменных ресурсов, а довольно плохая дорожная инфраструктура, препятствующая как использованию передовых технологий, так и организационным инновациям. Для различных предприятий и отраслей агропромышленных комплексов (также и для сельского хозяйства) основная составная часть материально-технической базы определяется транспортными средствами и дорожной инфраструктурой. Сроки доставки и реализации различных товаров сельской продукции определяются эффективностью логистических цепей поставок. При правильной организации логистического подхода в доставке сельхозпродукции обеспечивается повышение производительности и снижение себестоимости товара. Состояние дорожно-транспортной сети напрямую влияет на время транспортировки и, соответственно, количество перевозимой продукции на определенное расстояние (грузооборот). Роль транспорта в сельском хозяйстве часто обусловливается рядом различных особенностей, которые влияют на объем перевозки; сроки доставки и производительность перевозочного процесса. В данной статье будет рассмотрена взаимосвязь временных показателей на скорость и производительность перевозки, а влияние эксплуатационных качеств ‒ на экономические показатели.
Ключевые слова: транспорт, перевозка сельскохозяйственных грузов, производительность перевозочного процесса, автотранспортные средства, сроки доставки грузов.
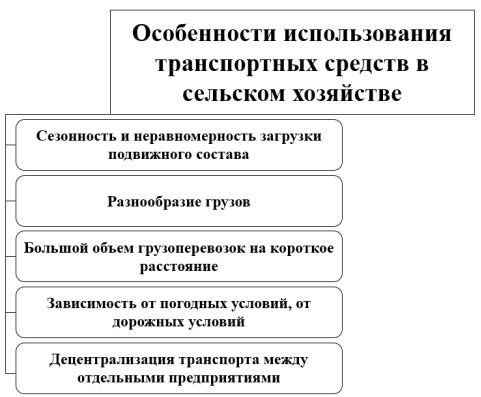
Постановка проблемы. Количественная оценка влияния транспортного сектора на уровень и состав совокупной производительности сельского хозяйства требует сопоставимых между собой показателей [5]. Использование транспортных средств в сельском хозяйстве имеет ряд особенностей (рис. 1).
Рисунок 1 – Особенности использования транспортных средств в сельском хозяйстве
В сельском хозяйстве автомобильный и тракторный виды транспорта являются основными. Автомобильные перевозки в сельском хозяйстве составляют около 75 %, трак-
307
торные в районе ‒ 25 %. В основном автомобильные транспортные средства используется на межхозяйственных перевозках. Для внутрихозяйственных транспортных работ (например в растениеводстве, животноводстве, строительстве) в основном используются тракторы. Данный вид техники часто используется в весенний и осенний периоды из-за того, что некоторые участки дороги труднодоступны автомобильным средствам [1].
Климатические условия и покрытие участков, по которым передвигается автомобильный транспорт, вносят свои коррективы в такой важный показатель, как время доставки груза. Чем больше элементов, которые увеличивают время доставки, тем меньше автотранспортное средство выполняет оборотов за рабочий день. Минимизация оборотов влияет на производительность перевозочного процесса в целом.
Большое влияние оказывает время погрузочно-разгрузочных работ в цепи доставки сельскохозяйственных грузов.
Усовершенствование временных показателей заключается в уменьшении времени движения и простоев автотранспортных средств.
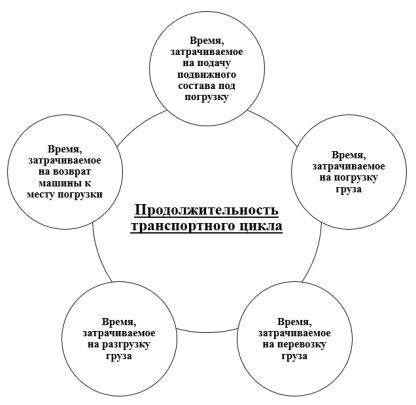
Материалы и методы. Доставку сельскохозяйственных грузов можно назвать циклом перевозок. Цикл перевозки грузов и цикл работы подвижного состава составляют весь цикл транспортного процесса (рис. 2).
Продолжительность цикла транспортного процесса складывается:
1)из продолжительности подачи подвижного состава под погрузку;
2)погрузки груза;
3)транспортирования;
4)разгрузки груза;
5)необходимости возврата подвижного состава к месту погрузки.
Рисунок 2 – Составные элементы продолжительности транспортного цикла
308
Продолжительность транспортного цикла рассчитывается следующим образом (см. формулу 1):
|
|
, |
|
|
|
|
1) |
где |
– время, затрачиваемое на нулевой пробег (пробег от парковочной площадки к |
||
пункту погрузки); – время, затрачиваемое на погрузку груза; |
– время движения от |
||
пункта погрузки до пункта разгрузки; |
– время, затрачиваемое на возврат авто- |
||
транспортного средства к месту погрузки.
Продолжительность транспортного цикла влияет на количество оборотов, которое успеет выполнить автотранспортное средство за время в наряде (см. формулу 2):
,
2)
где – время в наряде.
Значение количества оборотов будет напрямую влиять на суточный грузопоток. Результаты исследований. Производительность перевозочного процесса зави-
сит от следующих показателей (см. формулу 3):
3)
где – номинальная грузоподъемность автотранспортного средства; – статистический коэффициент использования грузоподъемности (зависит от класса перевозимого груза).
Перепишем формулу 3 с учетом времени:
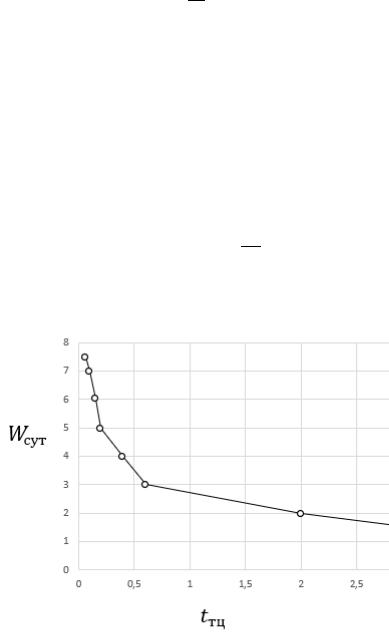
Фактически производительность грузового автомобиля зависит от продолжительности цикла перевозки [3]. На рисунке 3 представлен график зависимости этих показателей.
Рисунок 3 – Зависимость производительности от продолжительности транспортного цикла
309
Как видно из рисунка 3, чем меньше время транспортного цикла (минимизировать можно время простоев под погрузочно-разгрузочными операциями, при выборе маршрута по качественному дорожному покрытию и т.д.), тем выше становится производительность перевозочного процесса.
Выводы и предложения. Способ перевозки урожая часто влияет на показатели работы не только транспортных и погрузочных средств, но и обслуживаемых комбайнов. Так, перевозка зерна от комбайнов с использованием стационарно-передвижных компенсаторов сокращает простои комбайнов в ожидании транспорта на 10 % и повышает их производительность на 15 % по сравнению с прямыми перевозками [4]. Данный факт говорит о том, что повышения производительность перевозочного процесса влияет на улучшение многих показателей на всем этапе работы с сельскохозяйственной продукцией.
Список литературы
1.Аникин, Н. В. Анализ внутрихозяйственных перевозок сельскохозяйственной продукции [Текст] / Н. В. Аникин, Н. В. Бышов, И. А. Успенский [и др.] // Перспективные направления развития автотранспортного комплекса: II Международная научно-производственная конференция - Пенза: Изд-во ПГУАС, 2009. - С. 111-113.
2.Анализ факторов, влияющих на производственный процесс внутрирайонной перевозки сельскохозяйственных грузов [Текст] / Л.П. Белю, Д.С. Рябчиков, Е.В. Горин [и др.] // Вклад университетской аграрной науки в инновационное развитие агропромышленного комплекса: Материалы 70-й Международной научно-практической конференции. - Рязань: РГАТУ, 2019 - С. 54-62.
3.Рябчиков, Д.С. Анализ используемых транспортных средств для перевозки сельскохозяйственной продукции [Текст] / Д.С. Рябчиков, М.М. Ляшин, П.В. Ефимов // Вестник Совета молодых ученых Рязанского государственного агротехнологического университета имени П.А. Костычева. -2020. - № 1 (10). - С. 212-214.
4.Ряднов, А.И. Метод выбора транспортных средств при уборке сельскохозяйственных культур / Ряднов А.И. // Известия Нижневолжского агроуниверситетского комплекса: Наука и высшее профессиональное образование. - 2020. - № 1 (57). - С. 349-356.
5.Sike Liu. Transport and agricultural productivity: a cross-national analysis. Research on Modern Higher Education 2, 01012 (2017). DOI: 10.24104/rmhe/2017.02.01012.
УДК 62-25
ЗАВИСИМОСТЬ ТРЕНИЯ В ПОДШИПНИКАХ КАЧЕНИЯ ПРИ ЭКСПЛУАТАЦИИ МАШИНЫ
В.Ф. Миллер
ФГБОУ ВО Пермский ГАТУ, г. Пермь, Россия
E-mail: detali@pgatu.ru
Аннотация. Объектом данного исследования являются подшипники качения, применяемые в узлах машин. Для повышения долговечности, надежности и снижения энергозатрат для подшипников качения необходимо определить влияние эксплуатационных факторов. Определена зависимость момента и коэффициента трения от нагрузки на подшипник, уровня масла и угловой скорости вращения.
310