

8.4. Принцип компенсации постоянных времени в системах
ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
Рассмотрим сущность компенсации постоянных времени для простейшего случая, когда объект регулирования представляет собой апериодическое звено. Такие звенья чаще всего входят в состав объекта регулирования. При больших значениях постоянных времени они могут существенно влиять на быстродействие системы регулирования. Передаточная функция такого звена
![]() ,
,
Где
![]() и
и![]() -
соответственно коэффициент усиления
и постоянная времени звена.
-
соответственно коэффициент усиления
и постоянная времени звена.
Очевидно, что для осуществления абсолютной компенсации постоянной времени и превращения инерционного звена в усилительное, необходимо последовательно с объектом включить регулятор с передаточной функцией дифференцирующего звена (рис. 8.16).
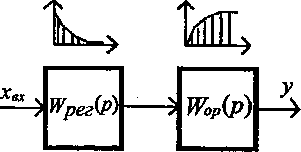
Рис. 8.16. Схема объекта регулирования с регулятором.
![]() ,
,
где Кр и Тр - соответственно коэффициент усиления и постоянная времени регулятора. В этом случае при Тр = Т0 имеем
![]() .
.
Физически это означает, что для мгновенного изменения выходной величины инерционного звена, нужно подать на его вход импульс напряжения бесконечной амплитуды (мгновенное форсирование).
Поэтому в реальных системах, имеющих ограниченные ресурсы управления, абсолютная компенсация неосуществима. Тем не менее, если применяется безынерционный регулятор, то при малых задаваемых приращениях выходной величины объекта принципиально-возможная степень компенсации приближается к абсолютной. Однако при такой степени компенсации контур регулирования становится весьма чувствительным к помехам.
Поэтому для инерционного звена объекта регулирования степень приближения компенсации к абсолютной ограничивается пределом, при котором полоса пропускания замкнутого контура обеспечивает его помехозащищенность. Последнее условие, в частности, может быть удовлетворено применением ПИ-регулятора с передаточной функцией.
![]() .
.
Если Тр=Т0, то передаточная функция разомкнутого контура будет иметь вид
![]()
Это соответствует передаточной функции интегрального звена с постоянной времени интегрирования Ти. При замыкании контура единичной обратной (рис. 8.17) связью, получим

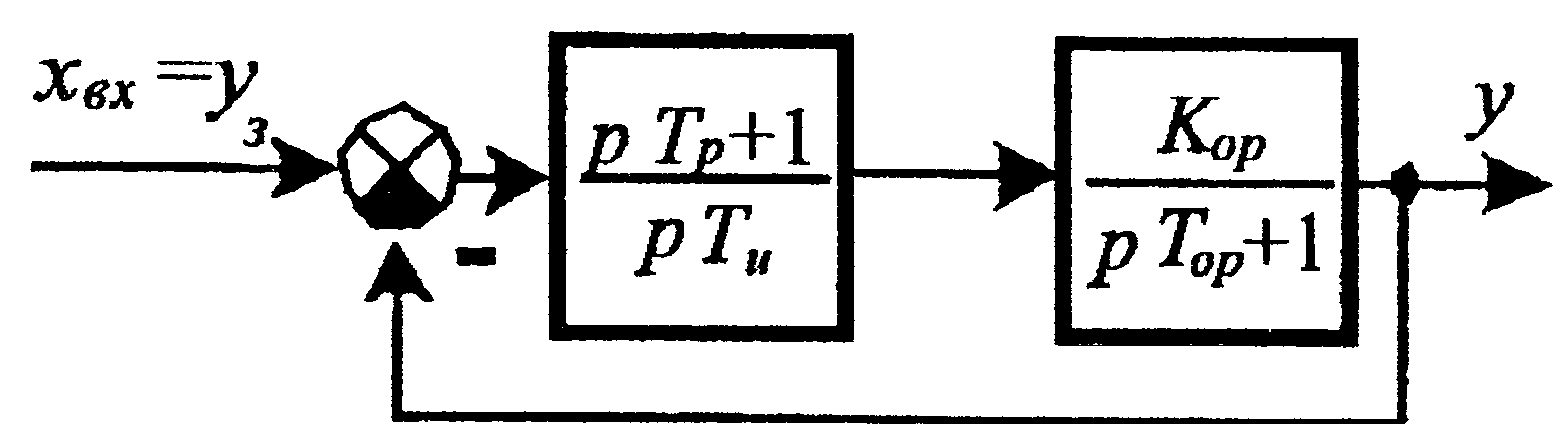
Рис. 8.17. Схема оптимальной замкнутой системы
Статическая ошибка такого замкнутого контура сводится к нулю из-за наличия интегрирующего звена в разомкнутой части системы. Следовательно, результатом компенсации явилась замена в разомкнутом контуре апериодического звена с большой постоянной времени Т0 интегрирующим звеном и постоянной времени Ти в разомкнутой системе и инерционным звеном с малой постоянной времени T’и =Ти/К0 в замкнутом состоянии.
Данный принцип компенсации используется при построении систем подчиненного регулирования.
8.5. Принцип расчета передяточных функций регуляторов в
СИСТЕМАХ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ
1. Объект регулирования состоит из двух инерционных звеньев (рис. 8.18)
Пусть
регулируемый объект состоит из двух
инерционных звеньев с постоянными
времени Т01
и
Т02,
причем Т01
- малая постоянная времени и Т02
- большая постоянная времени, которую
нужно скомпенсировать регулятором.
Постоянная времени Т01=![]() является
некомпенсируемой.
является
некомпенсируемой.
Для
оптимизации контура необходимо включить
регулятор с передаточной функцией
Wp(p)
последовательно
с объектом и замкнуть обратной связью
с коэффициентом
![]() .
.
Из условия оптимизации системы второго порядка следует, что замкнутая система второго порядка будет оптимизирована, если она обладает передаточной функцией
![]() .
(8.30)
.
(8.30)

Рис. 8.18. Оптимизация контура регулирования с двумя инерционными звеньями.
Передаточная функция разомкнутой оптимизированной системы имеет вид
![]() (8.31)
(8.31)
В то же время передаточная функция разомкнутой системы с учетом регулятора будет
![]() (8.32)
(8.32)
Приравнивая между собой выражения (8.31) и (8.32), получим требуемую передаточную функцию регулятора
![]() (8.33)
(8.33)
или
![]() ,
,
где
![]() - передаточная функция той части объекта
регулирования, которая компенсируется
данным регулятором;К
- передаточная функция той части объекта
регулирования, которая компенсируется
данным регулятором;К![]() -
коэффициент обратной связи контура
регулирования.
-
коэффициент обратной связи контура
регулирования.
2. Объект регулирования состоит из трех инерционных звеньев
Пусть
объект имеет три постоянных времени,
причем
![]() т.е.
объект содержит две большие постоянные
времени
т.е.
объект содержит две большие постоянные
времени![]() и
и![]() и одну малую некомпенсируемую постоянную
времени
и одну малую некомпенсируемую постоянную
времени![]() .
.
Следовательно, для оптимизации системы требуются два контура регулирования с двумя регуляторами. Расчет параметров системы регулирования в этом случае проводится последовательно от первого, внутреннего, к последующим внешним контурам регулирования.
Расчет начинается с внутреннего контура регулирования. Расчет полностью идентичен предыдущему случаю. Поэтому передаточная функция регулятора будет иметь тот же самый вид
![]() .
.
Передаточная функция внутреннего замкнутого контура
![]() (8.34)
(8.34)
Для второго разомкнутого оптимизированного контура
![]() (8.35)
(8.35)
При оптимизации данного контура передаточная функция должна иметь вид
![]() (8.36)
(8.36)
Приравнивая два последних выражения, получим передаточную функцию регулятора второго контура (рис. 8.19)
![]() (8.37)
(8.37)

Рис. 8.19. Оптимизация контуров регулирования для объекта стремя постоянными времени
Или же передаточную функцию регулятора можно представить в виде
![]() ,
(8.38)
,
(8.38)
где
![]() -передаточная
функция той части объекта регулирования,
которая компенсируется регулятором
второго контура;
-передаточная
функция той части объекта регулирования,
которая компенсируется регулятором
второго контура;
![]() коэффициенты обратных связей
соответственно внутреннего и внешнего
контуров регулирования.
коэффициенты обратных связей
соответственно внутреннего и внешнего
контуров регулирования.
Передаточная функция всей оптимизированной замкнутой системы будет иметь вид
![]() (8.39)
(8.39)
Если в системе имеется «n» постоянных времени, то количество регуляторов (контуров регулирования) равно «n-1».
В общем случае в системе может быть несколько контуров регулирования. Анализируя выражения для передаточных функций регуляторов, в общем случае можно записать для i-ro контура регулирования
![]() (8.40)
(8.40)
где
![]() и
и![]() - коэффициенты обратных связей контуров
регулирования. Для внутреннего контура
регулирования
- коэффициенты обратных связей контуров
регулирования. Для внутреннего контура
регулирования![]() =1;
=1;![]() -передаточная функция той части объекта
регулирования, которая компенсируется
регуляторомi-го
контура. Тип компенсируемого звена
может быть различным:
-передаточная функция той части объекта
регулирования, которая компенсируется
регуляторомi-го
контура. Тип компенсируемого звена
может быть различным:
а) Если компенсируется интегрирующее звено с передаточной
функцией
![]() ,
,
то передаточная функция регулятора определяется
![]() .
.
В этом случае регулятор должен иметь пропорциональную характеристику (Р-регулятор).
б) Если компенсируется инерционное звено
![]()
т.е. регулятор должен иметь пропорционально-интегральную характеристику (ПИ-регулятор).
в) Для компенсации колебательного звена с передаточной функцией
![]()
Регулятор будет иметь передаточную функцию

И П Д
В этом случае регулятор будет иметь ИПД-характеристику. Такой же регулятор будет и при компенсации апериодического звена второго порядка (см. рис. 8.19, б).
![]()
В этом случае передаточная функция регулятора будет иметь вид
![]()
Следовательно, благодаря применению в системе третьего порядка одного ПИД-регулятора вместо двух ПИ-регуляторов удается уменьшить число регулируемых контуров с двух до одного, снизить порядок дифференциального уравнения и сохранить время переходного процесса.
При наличии в контурах регуляторов с рассчитанными передаточными функциями, передаточные функции замкнутых контуров будут оптимальны. Следовательно, свойства контуров при рассмотрении их со стороны задающего воздействия также будут оптимальны.