

8.11.2 Реакция астатической сар на возмущающее воздействие
Структурные
схемы САР по возмущающему воздействию
для выходных координат![]() и
и![]() представлены на рис. 8.31. В соответствии
с этими схемами передаточные функции
системы при возмущающем воздействии
определятся:
представлены на рис. 8.31. В соответствии
с этими схемами передаточные функции
системы при возмущающем воздействии
определятся:
а)
Для выходной координаты
![]()
 ;
;
![]()
![]()
![]() (8.72)
(8.72)

Рис. 8.31. Структурная схема по возмущающим воздействиям
Следовательно, передаточная функция аналогична передаточной функции САР по управляющему воздействию для выходной величины внешнего контура.
Переходная функция в этом случае определится
![]() (8.73)
(8.73)
б)
Для выходной координаты внешнего
контура
![]()
![]()
![]()
 (8.74)
(8.74)
Переходная функция внешнего контура при возмущающем воздействии
![]() (8.75)
(8.75)
Однако
переходная функция для выходной
координаты определяется при одновременном
приложении к системе управляющего
воздействия g(t)
=
![]() (t)
= 1,0 и возмущающего воздействия F(t)
= 1,0. Поэтому, в соответствии с принципом
наложения, получим
(t)
= 1,0 и возмущающего воздействия F(t)
= 1,0. Поэтому, в соответствии с принципом
наложения, получим
![]() (8.76)
(8.76)
Переходный процесс для выходной координаты астатической САР при возмущающем воздействии представлен на рис. 8.32.
Анализ
кривых переходного процесса показывает,
что исследуемая система является
астатической, т.к. при приложении
возмущающего воздействия статическая
ошибка
![]() =0.
Это объясняется тем, что при наличии
ПИ-регулятора во внешнем контуре при
появлении ошибки будет изменяться
выходной сигнал регулятора до тех пор,
пока статическая ошибка регулирования
не станет равной нулю.
=0.
Это объясняется тем, что при наличии
ПИ-регулятора во внешнем контуре при
появлении ошибки будет изменяться
выходной сигнал регулятора до тех пор,
пока статическая ошибка регулирования
не станет равной нулю.
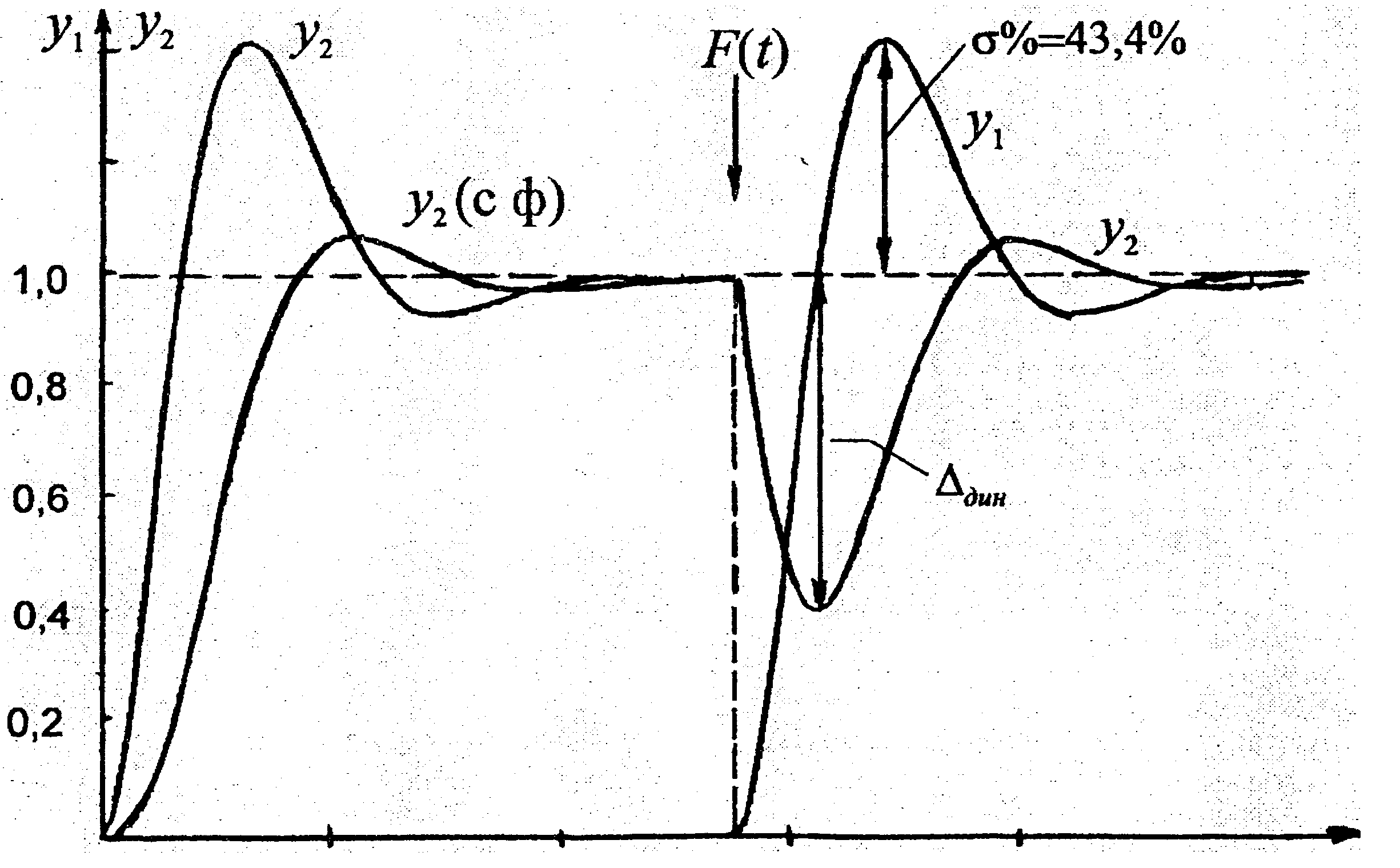
Рис. 8.32. Переходные процессы систем при возмущающем воздействии
Однако
во время переходного процесса появляется
динамическая ошибка
![]() .
Кроме того, при настройке по «симметричному
оптимуму» возникает перерегулирование
выходной координаты
.
Кроме того, при настройке по «симметричному
оптимуму» возникает перерегулирование
выходной координаты![]() при
возмущающем воздействии и выходной
координаты
при
возмущающем воздействии и выходной
координаты![]() при управляющем воздействии, равной
43,4%.
при управляющем воздействии, равной
43,4%.
Анализируя результаты исследования оптимальных систем подчиненного регулирования при настройке по модульному и симметричному оптимумам можно отметить следующее:
1. Данные системы позволяют получить оптимальные статические и динамические показатели переходных процессов с минимальным перерегулированием в статических системах и с нулевой статической ошибкой в астатических системах.
2. Простота построения структурной схемы системы подчиненного регулирования, включающей в себя отдельные контуры регулирования с регуляторами, обеспечивающими регулирование одной из координат объекта регулирования.
3. Простота расчета и настройки регуляторов. Оптимизация каждого контура позволяет получить оптимальные стандартные передаточные функции и переходные функции на типовые ступенчатые воздействия.
4. Удобство ограничения предельных значений промежуточных координат системы за счет ограничения выходных сигналов регуляторов внешнего контура.
5. Исходя из принципа построения системы, быстродействие каждого внешнего контура ниже быстродействия соответствующего внутреннего контура.
Указанные достоинства систем подчиненного регулирования привели к тому, что такие системы получили широкое применение во всех отраслях, особенно в автоматизированном электроприводе.
8.12. КОНТРОЛЬНЫЕ ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Что понимают под оптимальной системой автоматического регулирования?
2. Объясните сущность интегрального метода оценки качества регулирования САР.
3. Что понимают под оптимальным переходным процессом САР?
4. По каким критериям оптимальности оценивают переходные процессы в САР?
5. При каких условиях может быть обеспечен технический или модульный оптимум в системах регулирования?
6. Напишите передаточные функции разомкнутой и замкнутой оптимальной по модульному оптимуму систем второго порядка.
7. Представьте ЛАЧХ и ЛФЧХ разомкнутой оптимальной по модульному оптимуму САР второго и третьего порядков.
8. Как изменяются показатели переходного процесса при повышении порядка оптимальной системы со второго на третий?
9. В чём заключается принцип компенсации больших постоянных времени объектов регулирования с помощью регуляторов?
10. Как определяется передаточная функция регуляторов в системах регулирования оптимальных САР?
11. Каким образом при заданной структурной схеме объекта регулирования составляется общая структурная схема оптимальной САР?
12. Назначение регуляторов в оптимальных системах автоматического регулирования.
13. Объясните, как влияют на показатели переходного процесса:
- изменение
постоянной времени
![]() обратной связи регулятора внутреннего
контура САР;
обратной связи регулятора внутреннего
контура САР;
- изменение
постоянной времени интегрирования
![]() регулятора внутреннего контура САР.
регулятора внутреннего контура САР.
14. Объясните, в чём заключается симметричный оптимум оптимальных САР?
15. Представьте и объясните ЛАЧХ и ЛФЧХ оптимальной по симметричному оптимуму САР.
16. В чём заключается отличие между астатической и статической оптимальными САР?
17. Объясните характер протекающих переходных процессов в статической оптимальной САР при задающем и возмущающем воздействиях.
18. Как определить прямые и косвенные показатели качества оптимальных статических САР?
19. Как определить прямые и косвенные показатели качества астатических САР при управляющем и возмущающем воздействиях?
20. Сравните между собой статические и астатические оптимальные САР.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Теория автоматического управления. Ч. 1. Теория линейных систем автоматического управления. / Под ред. А. А. Воронова. - М.: Высш. шк., 1986.-367 с.
2. Зайцев В.А. Теория автоматического управления.- М. Высш. шк., 1975.-424 с.
3. Оглоблин Л.Я. Линейные динамические звенья и системы автоматического регулирования. Метод, указания к лабораторному практикуму. - Магнитогорск: МГТУ, 2000.
4. Бесекерский В.А. и др. Сборник задач по теории автоматического регулирования и управления. - М.: Наука, 1978.-570 с.