

Детали машин и основы конструирования. Нилов В.А., Рукин Ю.Б
.pdfВ.А. Нилов Ю.Б. Рукин Р.А. Жилин
ДЕТАЛИ МАШИН И ОСНОВЫ КОНСТРУИРОВАНИЯ
Часть 3
Учебное пособие
Воронеж 2005
2
Воронежский государственный технический университет
В.А. Нилов Ю.Б. Рукин Р.А. Жилин
ДЕТАЛИ МАШИН И ОСНОВЫ КОНСТРУИРОВАНИЯ
Часть 3
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Воронеж 2005
3

УДК 621.81(075.8)
Нилов В.А., Рукин Ю.Б., Жилин Р.А. Детали машин и основы конструирования: Учеб. пособие: Ч. 3. Воронеж: Воронеж. гос. техн. ун-т, 2005. 157 с.
В учебном пособии рассмотрены вопросы расчета и конструирования типовых деталей машин. Особое внимание уделено освещению вопросов, связанных с применением деталей при конструировании роботов.
Издание соответствует требованиям Государственного образовательного стандарта высшего профессионального образования по направлению 220400 «Мехатроника и роботехника», специальности 220402 «Роботы и робототехнические системы», дисциплине «Детали машин и основы конструирования».
Учебное пособие подготовлено на магнитном носителе в текстовом редакторе MS WORD 2000 и содержится в файле Конспект ДМ РС-3.doc.
Табл. 10. Ил. 59. Библиогр.: 5 назв.
Научный редактор канд. техн. наук, доц. Б.Б. Еськов Рецензенты: кафедра дорожных и строительных машин
ВГАСУ (зав. кафедрой д-р техн. наук, проф. П.И. Никулин); д-р физ.-мат. наук, проф. В.Н. Нечаев
Нилов В.А., Рукин Ю.Б., Жилин Р.А,
2005
Оформление. ГОУВПО «Воронежский государственный технический универ-
ситет», 20054
19. ЦИЛИНДРИЧЕСКИЕ ПЕРЕДАЧИ НОВИКОВА
Учебные вопросы
1.Цилиндрические передачи Новикова
2.Винтовые и гипоидные передачи
3.Волновые передачи
Классическая эвольвентная система зацепления, созданная в России академиком Д. Эйлером в 1754 г., благодаря своим бесспорным достоинствам заняла господствующее положение в современной технике. Вместе с тем, как и все системы с линейчатым контактом, она имеет серьезные органически ей присущие недостатки. Основными из них являются:
-ограниченная контактная прочность зубьев, которая, как известно, зависит от радиусов кривизны профилей зубьев (в случае эвольвентного зацепления при заданных параметрах зубчатых колес существенно изменить величину этих радиусов невозможно),
-большая чувствительность к перекосу осей валов передачи (это вызывает трудности обеспечения линейчатого контакта сопряженных поверхностей зубьев),
-сравнительно большие потери мощности (0,5 … 1,0%) за счет трения в зацеплении для одной пары зубчатых колес.
Перечисленные недостатки существенно уменьшены в системе точечного зацепления с круто винтовыми зубьями, предложенной в 1954 г. M.JI. Новиковым. За свои работы в этой области М.Н. Новикову в 1954 г. присуждена Ленинская премия.
Благодаря своим достоинствам, передачи Новикова получали широкую известность не только в Советском Союзе, но и зарубежом.
Так в начале 60-х годов многие капиталистические фирмы ("Фиат", "Виккерс", "Юнсон" и др.) изъявили желание приобрести лицензии на передачи Новикова.
3
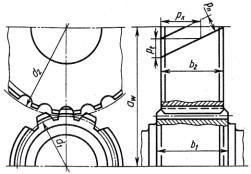
В точечном зацеплении Новикова (рис. 19.1) контакт зубьев перемещается не по профилю, как в прямозубом эвольвентном зацеплении, а вдоль зуба, причем скорость перемещения и угол давления остаются постоянными. Наиболее простыми, обеспечивающими точечный контакт, являются дуговые зубья с весьма близкими радиусами кривизны при внутреннем касании. Линия зацепления в этом случае расположена параллельно оси колес, а не в плоскости их вращения рабочие (боковые) поверхности зубьев представляют собой круговинтовые поверхности.
Рис. 19.1. Цилиндрические передачи Новикова
В продольной плоскости в связи с большими радиусами кривизны винтовых линий происходит касание также с большим радиусом кривизны, что при работе зацепления обеспечивает передачу нагрузки на значительную площадку контакта.
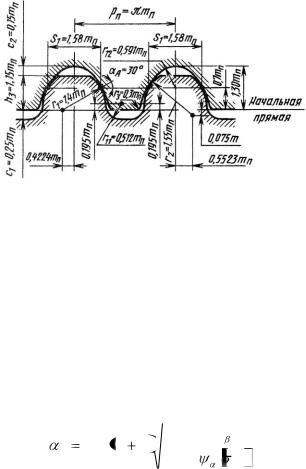
Применяют передачи Новикова с одной линией зацепления – заполюсные и с двумя линиями зацепления – дозаполюсные. В передачах с одной линией зацепления профиль зубьев у одного колеса делается выпуклым (рис. 19.2), а другой – вогнутым. Ведущим в большинстве случаев делают зубчатое колесо с выпуклым профилем. В этом случае точка контакта зубьев расположена за полюсом и передачу называют заполюсной.
У передач с двумя линиями зацепления головки зубьев колеса и шестерни имеют выпуклый профиль, а ножки – вогнутый. Передачи Новикова с двумя линиями зацепления обладают большей несущей способностью, менее чувствительны
4
к смещению осей, работают с меньшим шумом и более технологичны их для нарезания выпуклых и вогнутых зубьев требуют различные инструменты. Исходный контур передач с двумя линиями зацепления выполняют по ГОСТ 15023-69.
Рис. 19.2. Исходный контур для передач Новикова
содной линией зацепления
Воснове расчета на контактную прочность передач Новикова лежат те же критерии работоспособности, что и для передач с эвольвентным профилем, но с некоторыми поправками. Это связано со сложной формой площадок контакта и с малой длиной контактных линий, а, следовательно, с большим влиянием на несущую способность боковых утечек масла.
Методика расчета зубчатой передачи Новикова с двумя линиями зацепления следующая:
1. Из условия контактной прочности определяют межосевое расстояние αw.
|
430 U I 3 |
|
M |
2 KH |
|
w |
|
2 |
|
||
|
U 21,3 |
|
|||
|
|
|
|||
|
|
|
|
H |
|
где: U – передаточное число,
M2 – крутящий момент на колесе, Н·м,
KHβ – коэффициент концентрации нагрузки,
ψα – коэффициент длины зуба (при симметричном положении колес относительно опор ψα = 0,5…0,63, при несиммет-
ричном ψα = 0,315…0,4).
5
[ζH] – допускаемые контактные напряжения.
2. Назначают и определяют числа зубьев. Число зубьев шестерни Z1 обычно выбирают в диапазоне Z1 = 1…25, меньшие значения при больших передаточных числах, малых скоростях и кратковременной работе. Число зубьев колеса определяют по зависимости:
Z2 = Z1+U.
Суммарное число зубьев ∑Z = Z1 + Z2, как и для других передач, должно быть целым.
3. Определяют нормальный модуль передачи и угол наклона зубьев:
m |
2 w |
cos , |
|
||
U |
Z |
|
|
||
где: β – угол наклона линии зубьев – выбирают равным 10... 24° на данной стадии проектирования обычно принимают β = 15°
Значение модуля mu округляют до стандартного, по ГОСТ 14186-69. Затем уточняют фактический угол наклона линии зубьев:
|
arccos |
mn |
Z |
. |
|
2 |
w |
||
|
|
|
||
4. |
Определяют основные размеры зубчатой пары ( ); |
|||
5. |
Производят проверочный расчет контактных напря- |
|||
жений по формуле: |
|
|
|
|
|
400 |
|
M 2 KH sin |
|
H , |
|||||
H |
Z m |
2,4 |
K |
K |
|
K d |
0,5 |
|||
|
|
|
Z |
V |
|
|||||
|
2 |
n |
k |
|
|
|
||||
где: mn2,4 – принимают по таблицам соответственно значению
mn
Kk – коэффициент контура (равен 1,0 для контура с одной линией зацепления, а для передач с двумя линиями зацепления
1,3).
6
Kz – коэффициент числа зубьев, учитывающий уменьшение площади контакта с уменьшением числа зубьев (для передач с одной линией зацепления Kz=Kz1), а для передач с двумя линиями зацепления
Кz = 0,5Kz1+Kz2.
Kz1 и Kz2 принимают в зависимости от эквивалентного числа зубьев:
ZV1 |
Z1 |
; ZV2 |
Z2 |
, |
cos3 |
cos3 |
Kε – коэффициент, учитывающий перекрытие определяют по графику (в зависимости от εβ – коэффициента осевого перекрытия).
DV – эквивалентный диаметр
dV |
d1U |
. |
||
U |
1 |
|||
|
|
|||
6. Производят проверку прочности зубьев на изгиб по формуле:
|
M 2 KF |
KV KM YZ |
F , |
||
H |
0.55Z |
m3K |
|
K |
|
|
E |
|
|||
|
|
2 n |
|
|
|
где: KFβ – коэффициент концентрации нагрузки (определяется как для эвольвентных колес),
KV – коэффициент динамической нагрузки, выбираемый в зависимости от окружной скорости и степени точности,
КM – коэффициент масштабного фактора,
YV – коэффициент прочности зубьев, выбирают от экви-
валентного числа зубьев Z |
Z cos3 ; |
V |
|
Кρ – коэффициент, учитывающий расчетную длину зуба в зависимости от приведенного радиуса кривизны.
При изготовлена шестерни и колеса из разных материалов проверку прочности производят отдельно.
7

19.1. Винтовые и гипоидные передачи
Винтовые и гипоидные передачи (рис. 19.3, 19.4) являются разновидностью зубчатых передач, но выгодно отличаются от конических передач (с пересекающимися осями) тем, что оба вала и колеса и шестерни можно вывести за пределы передачи и избежать консольного расположения шестерни.
Винтовые и гипоидные передачи относятся к передачам с перекрещивающимися осями и имеют высокую плавность и бесшумность работы. Угол перекрещивания осей валов может быть выполнен любым, но на практике чаще всего применяют передачи с углом скрещивания δ = 90°. Общим недостатком рассматриваемых передач является скольжение вдоль зубьев, вследствие чего их КПД ниже, чем зубчатых, а мощности, передаваемые ими, ограничены более узкими передачами.
Простейшей парой для передачи крутящего момента между перекрещивающимися валами является винтовая передача (рис.19.3), состоящая из двух цилиндрических колес с косыми зубьями.
В винтовых передачах начальное касание между зубьями происходит в точке в условиях значительных скоростей скольжения. Поэтому несущая способность этих передач невелика. В качестве силовых эти передачи распространения не получили. Чаще всего их применяют как “кинематические" передачи при U ≤ 5. Поскольку винтовые передачи образуются из косозубых цилиндрических колес, то для нахождения размеров винтовых колес пригодны формулы, определяющие размеры цилиндрических косозубых колес.
Передаточное число винтовой передачи равно:
U |
n1 |
|
z2 |
|
d2 |
tg |
|
, |
n2 |
|
z1 |
|
d1 |
1 |
|||
|
|
|
|
|
||||
|
|
|
|
|
|
где: n1;n2 – частоты вращения ведущего и ведомого валов; z1;z2 – числа зубьев ведущего и ведомых валов;
d1;d2 – диаметры делительных цилиндров ведомого и ведущего колес.
β1 – угол наклона зуба на ведущем колесе.
8